基于Zigbee的新型激光模拟对抗训练系统设计
2015-11-24吴蓬勃李学海
吴蓬勃,杨 斐,李 莉,李学海
(石家庄邮电职业技术学院,电信工程系,河北 石家庄 050031)
·激光应用技术·
基于Zigbee的新型激光模拟对抗训练系统设计
吴蓬勃,杨 斐,李 莉,李学海
(石家庄邮电职业技术学院,电信工程系,河北 石家庄 050031)
设计了一种基于Zigbee的新型激光模拟对抗训练系统。重点介绍了总体设计思想以及软硬件实现方案。系统硬件以STM32为核心,通过激光器将经过编码的信号发送到接收端,利用Zigbee无线模块实现了总站控制台、射击单元和靶位单元的数据互联互通。总站可实时监控训练态势、自动识别与评估双方毁伤情况、实时显示战场态势,为检验训练效果提供了重要科学手段。
Zigbee;激光;STM32;模拟对抗
1 引 言
传统的对抗射击训练系统不能真枪实弹地对抗,很难真实反映火力交战过程和双方战损情况,胜负往往取决于导调人员的主观评判,以致于实战效果、导调控制、裁决评估这3个关键问题无法有效解决,对抗结果难以令人信服。
本文结合传统激光模拟对抗训练系统和激光打靶系统的特点,设计了一种新型激光模拟对抗训练系统,既可用于多兵对抗训练,也可用于单兵打靶训练。该系统利用激光发射与接收来模拟枪支射击机理和被命中的战损状况,使训练贴近实战;激光束命中目标,接收器可自动禁止士兵射击,并使之倒下,强制被击中方退出战斗;士兵可控制自身的接收器躲藏、摆动,模拟真实士兵的动作;总控制台能通过Zigbee无线通信网络接收每个激光发射机和接收器发来的数据、弹药存量、战斗状态等信息,使总控制台可以自动监控训练态势、自动识别与评估双方毁伤情况、实时显示战场态势,为检验训练效果提供了重要科学手段[1-2]。
2 系统总体规划
本系统主要包括三个组成部分:兵人射击单元、兵人靶位单元、总控制台,如图1所示。兵人射击单元和兵人靶位单元分别编号,每个兵人射击单元对应一个兵人靶位单元。其中,兵人靶位单元包括:3个靶位、1个随机分配器;总控制台包括:工控机、LED显示屏。
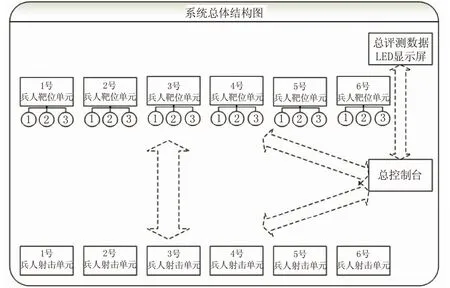
图1 系统总体结构图
兵人射击单元和兵人靶位单元之间、总控制台与兵人射击单元或兵人靶位单元之间、总控制台与LED显示屏之间均通过Zigbee无线连接,从而构建了一个Zigbee无线网络。总控制台通过串口连接Zigbee协调器,实现网络的组建、兵人射击单元与兵人靶位单元状态采集和指令的发送(包括广播方式和点对点方式)。兵人射击单元和兵人靶位单元均作为Zigbee路由器,实现数据的无线发射、接收、转发。
本系统最多可供6个士兵对抗训练,也可供单兵打靶训练,还可根据需要扩展对抗单元。
3 硬件单元设计
3.1 兵人射击单元
兵人射击单元主要包括:STM32单元、声光模块、Zigbee无线模块、开关量检测单元、电机驱动单元等,如图2所示。
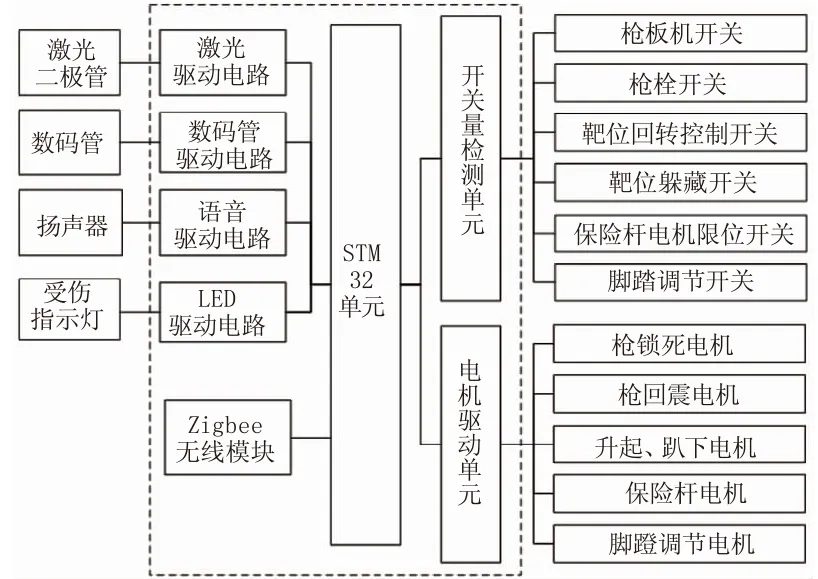
图2 兵人射击单元
(1)声光模块包括:激光驱动电路、数码管驱动电路、语音驱动电路、LED指示灯驱动电路。(2)Zigbee无线模块通过串口与STM32通信,实现与兵人靶位单元和总控制台的无线通信。(3)开关量检测单元实现开关信号的检测。开关信号包括:扳机开关、枪栓开关、靶位回转控制开关(枪支在左右转动时,靶位也做相应的转动,以仿真真实士兵的动作)、靶位躲藏开关(可控制对应靶位的躲藏,防止被射击)、保险杆电机限位开关、脚踏调节开关。(4)电机驱动单元实现电机的正反转控制。电机包括:枪锁死电机、枪回震电机、升起和趴下电机、保险杆电机(保险杆主要用于防止人在趴床升起和降落过程中损伤)和脚蹬调节电机(每个人的身高不同,所以趴床的脚踏板可以根据需要调节)。
3.1.1 激光驱动电路
本系统采用650 nm红光半导体激光器(后面简称LD),工作电流100 mA,工作电压2.8 V。由于LD是电流注入驱动,电流稳定性直接影响输出功率的稳定性,因此驱动LD的电流源,要求稳定性优于10-3。另外,还要求电流源有抗击浪涌击穿、断电保护等功能,以保证LD安全、可靠的工作。
LD驱动电路包含四部分:延时开关电路、电流驱动电路、保护电路和调制信号电路,如图3所示。延时开关电路用于延长电源打开或关闭的时间,防止浪涌击穿LD。电流驱动电路结合来自LD的负反馈,构成高稳定恒流源电路。保护电路用于防止高频干扰、浪涌,提高LD寿命。调制信号电路用于产生调制信号。
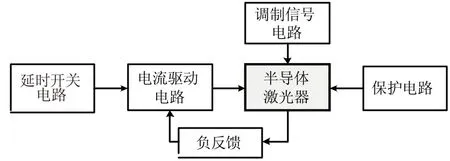
图3 激光器驱动电路框图[3-6]
图4为具体的LD驱动电路图。上半部分为延时开关电路,三极管Q4两侧的L1、C4、C9和L2、C10、C11为两个π型滤波网络。Q4基极的R12和C15构成延时网络,电源VCC打开时,电容C15充电,经过延时后,C15电压达到一定值可以使得Q4导通;VCC通过Q4变为VCC_LD,开始给LD供电;VCC断开时,C15放电,经过延时后,C15电压降到一定值使得三极管Q4断开。设Q4集电极电压为Vi,电容C15电压为Vo,则由电容充电公式Vo=Vi×(1-e-t/RC),可计算出充放电时间。
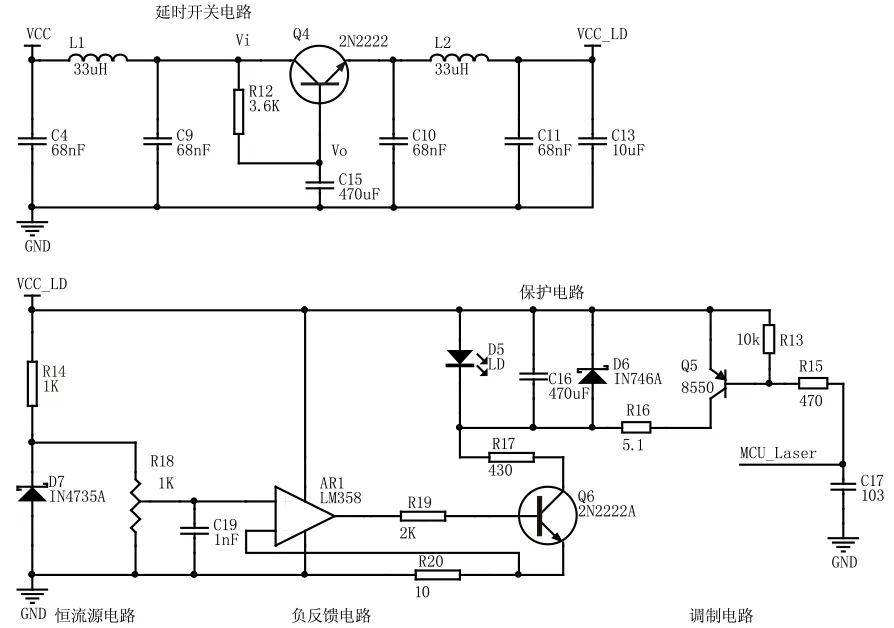
图4 激光器驱动电路图
在图4下半部分中,由齐纳二极管D7和可变电阻R18构成恒流源电路,C19防止可变电阻滑动端在滑动过程中接触不良从而引发浪涌。通过采样电阻R20获取LD的工作电流,反馈到LM358的反相端与同相端的恒流源比较,当两者不同时,LM358输出信号控制Q6的导通或截止,从而保证了LD电流的恒定。在半导体激光管LD的右侧管并联了一个电容C16,可以滤掉流过LD 电流中的高频干扰,避免LD由于高频干扰而受到损坏。同时并联一个反向二极管D6,以此来防止激光管两端受过大的反向电压而损坏。图4右下角为调制电路,STM32产生38 kHz调制信号,通过MCU_Laser控制三极管Q5的开关,从而控制激光管LD的开关。
3.1.2 Zigbee无线模块
本系统的Zigbee无线通信部分,采用了TI公司的Zigbee/IEEE 802.15.4无线射频收发器CC2530。该芯片结合了RF收发器、增强型8051CPU、系统内可编程闪存、8 kB的RAM和许多其他模块,功能强大。它能满足超低功耗系统的要求。同时CC2530在各运行模式之间转换的时间很短,使其进一步降低能源消耗。CC2530无线Zigbee单元的电路,如图5所示。天线将Zigbee无线信号转换为数据信号,CC2530将数据进行解析后,转换为相应的逻辑动作,驱动所连接的执行部件动作。
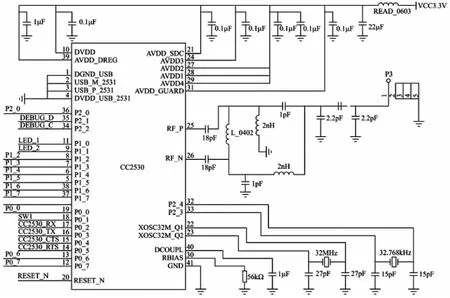
图5 CC2530无线Zigbee单元电路图[7]
3.2 兵人靶位单元
一个兵人靶位单元包括一个随机分配器以及3个靶位。随机分配器通过Zigbee模块接收总控制台指令,进行数据解析后,通过485总线随机激活一个靶位;同时也可接收兵人射击单元指令,控制靶位动作。靶位被击中后,会将击中信息通过随机分配器的Zigbee模块反馈到总控制台。
靶位功能框图如图6所示。靶位上带有兵人模型,兵人模型可升起、可躲藏、可回转、带有受伤指示灯,同时带有硅光电池,可接受激光信号。下面着重对激光接收部分的信号调理电路做具体介绍。

图6 靶位功能框图
硅光电池转换效率高、寿命长、性能稳定[8],适用于接收红光和红外光,使用的波长范围为400~1200 nm,峰值波长在800 nm附近。本系统采用的是650 nm的红光激光器,既适合硅光电池接收,又便于激光枪校准。
本系统采用的硅光电池,开路电压为0.5 V,短路电流25 mA。然而硅光电池在日光灯光照射下电压为0.2 V,如果通过电压的变化来检测接收到的信号,则接收灵敏度不高,而且很容易受到外界光线的干扰。所以本系统通过检测硅光电池的电流变化来接收激光信号,信号调理电路图如图7所示,检测电流范围为4~20 mA,对于4 mA以下的电流判断为背景噪声。如图7所示,4~20 mA电流流过采样100 Ω电阻R1,在R1上会产生0.4~2 V的电压差。
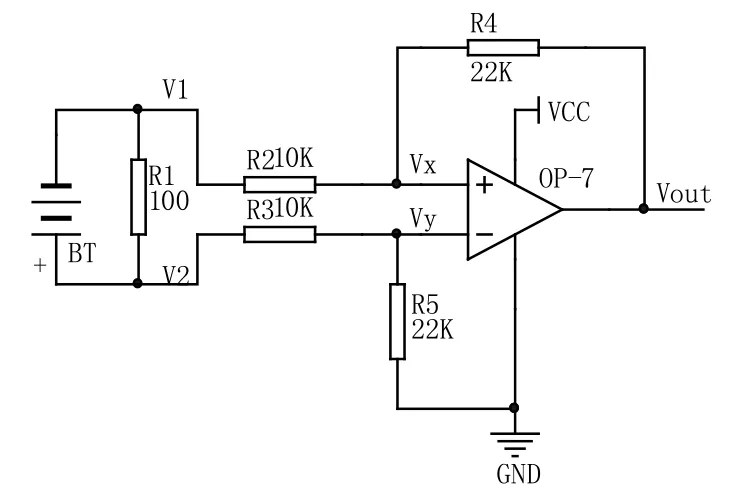
图7 信号调理电路
经过运放电路的处理后,通过Vout输出0.88~4.4 V电压,送至STM32进行数据处理。
图8为经过信号调理后的激光脉冲信号,当没有激光照射硅光电池时,信号调理电路输出为0 V,当有激光照射时,信号电压峰峰值最小为2.6 V,最大为3 V,满足TTL高电平的要求,所以可以直接被STM32识别并解调。在图8中可看出,信号从0~2.6 V,经过了40 ms的时间,这是因为,为了模拟真实子弹射出的过程,非射击状态下,激光处于关闭状态,仅在开枪射击时,才打开激光。而激光管在从不亮到点亮时,需要一定的时延,以保护激光管,同时也是为了保证信号的可靠传输。所以在开枪射击时,需先将激光管点亮一段时间后,再发送调制信号,经测试这个时间延时,不会影响到射击的效果。

图8 信号调理后的激光信号
4 软件系统设计
4.1 软件工作流程
软件工作流程如图9所示。
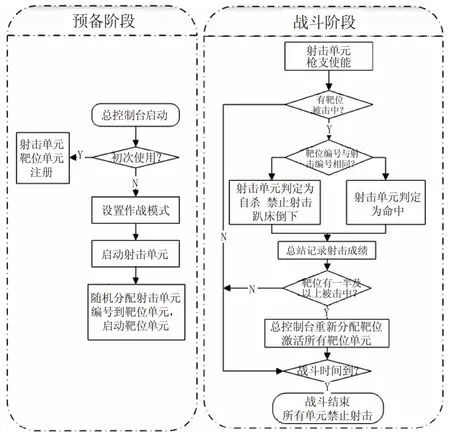
图9 系统工作流程
图9中,左半部为预备阶段,首先,总控制台启动;如果是初次使用需要先将各个单元进行注册(具体注册流程见4.2部分);然后设置作战模式;启动射击单元;总控制台随机分配射击单元编号到靶位单元,并启动靶位单元。图9右半部分为战斗阶段,首先使能各个射击单元的枪支,开始进入战斗阶段,各个射击单元可发射带有自身编号的激光信号;如果有靶位单元被击中,则判断接收到的单元编号与自身被分配的单元编号是否一致,如果编号一致,则判定为“自杀”,对应的射击单元禁止射击,同时趴床趴下;如果编号不一致,则判定为“命中”;各个射击单元实时显示自身射击成绩,同时总控制台记录所有射击单元的成绩;如果靶位有一半以上被击中,则总站重新分配所有靶位编号并激活所有单元。如果射击时间到,则战斗结束,所有单元禁止射击,LED屏显示战斗结果。
4.2 Zigbee无线模块软件设计
Zigbee无线模块的主要功能是,自动组建无线网络,将串口数据进行无线收发。要实现自动组网功能,需要先配置1个协调器(通过串口连接总站控制台的工控机),并设置PANID号;其他无线Zigbee模块配置为路由器,加入到协调器所构建的网络中,协调器会为每个路由器设备分配一个16位的短地址(Short Address)。只要网络中不再加入新的路由器或节点设备,短地址不会发生改变。
Zigbee路由器的16位短地址(Short Address)可以作为网络中各个设备通信地址使用。但是具体哪个短地址对应哪个单元,协调器如何区分数据是来自哪个单元的,本系统将Zigbee模块的短地址和实际物理地址进行了绑定,并存储到STM32的内部Flash存储器中。
Zigbee路由器的Zigbee的短地址与物理地址的绑定过程为:首先进行硬件初始化,等待协调器工作稳定后,读取Zigbee节点的PANID和短地址,然后判断当前单元的编号DeviceID是否已配置,如果已配置,则将存储在STM32 的Flash中的PANID和短地址与当前读取的数据进行匹配,如果数据一致,则进入数据收发状态。如果信息不一致,则进入DeviceID设置状态。如果DeviceID未配置,则也进入DeviceID配置状态。通过按键输入设备的DeviceID,并将PANID、短地址和DeviceID写入Flash,然后将这些信息发送到Zigbee协调器,协调器存储每个DeviceID对应的短地址,并将接收的数据再次反馈到对应的Zigbee路由器进行数据核实。如果数据核实正确,则进入数据收发状态。通过这种方式,实现了短地址与物理地址DeviceID的绑定。协调器收到各个路由器反馈的数据就可以根据短地址查找出对应的物理地址。
5 结 论
本文提出了一种基于Zigbee的无线激光模拟对抗训练系统,既可以用于多兵战术训练,也可用于单兵打靶训练。该系统通过Zigbee实现了兵人射击单元、兵人靶位单元和总站控制台互联互通,兵人射击单元与对应靶位单元的联动,总站控制台可以实时的感知各个单元的战斗状态、获取战场数据,为部队训练、企业拓展训练、室内运动等领域提供了良好的训练平台。
[1] CHEN Fuqiang.The study of laser simulation system for individual soldier tactics counters work training[D].Changsha:National University of Defense Technology,2007.(in Chinese)
陈富强.单兵综合战术对抗训练激光模拟系统研究[D].长沙:国防科学技术大学,2007.
[2] SUN Chunsheng,ZHANG Xiaohui,ZHANG Shuang.Research on the Layout and evaluation of Laser waring receiver[J].Laser & Infrared,2014(4):419-422.(in Chinese)
孙春生,张晓晖,张爽.激光告警装置的布设及其评价方法研究[J].激光与红外,2014(4):419-422.
[3] WANG Dong,LU Yong.Design of modulation constant current driving circuit for laser diode[J].Modern Electronics Technique,2010(7):92-98.(in Chinese)
王冬,吕勇.调制型半导体激光器恒流驱动电路设计[J].现代电子技术,2010(7):92-98.
[4] LIU Baoyuan,GUO Xiaoyun.Design of practical driven circuit for small power semiconductor lasers[J].Electro-optic Technology Application,2009(10):40-43.(in Chinese)
刘宝元,郭小云.实用小功率半导体激光器驱动电路的设计[J].光电技术应用,2009(10):40-43.
[5] XIE Yong,YANG Tao,GU Minfen,et al.Design of a new laser target practice system[J].Optoelectronic Technology & Information,2003,(10):33-37.(in Chinese)
谢勇,杨涛,顾敏芬,等.新型激光打靶器的设计[J].光电子技术与信息,2003,(10):33-37.
[6] HU Zhimin,LIN Xiaochun,YAN Shaohui,et al.Design of stable and adjustable power LD driver circuit[J].Application of Electronic Technique,2004,(12):39-40.(in Chinese)
胡志敏,林晓春,严绍辉,等.功率稳定可调LD驱动电路的设计[J].电子技术应用,2004,(12):39-40.
[7] WU Pengbo,LI Xuehai,BU Xinhua.The Design of intelligent monitoring channel in the library system based on RFID and Zigbee technology[J].Microcontrollers & Embedded Systems,2013,(12):52-53.(in Chinese)
吴蓬勃、李学海、卜新华.基于RFID和Zigbee的图书馆智能监控通道系统设计[J].单片机与嵌入式系统应用,2013,(12):52-53.
[8] FU Wenyu,PENG Shilin.The application of silicon photoelectric diode in the photoelectric detection circuit[J].Journal of XuChang Techers College,2001,(9):19-22.(in Chinese)
付文羽,彭世林.硅光电二极管在光电检测电路中的应用研究[J].许昌师专学报,2001,(9):19-22.
Design of laser simulation tactical training system based on Zigbee
WU Peng-bo,YANG Fei,LI Li,LI Xue-hai
(Shijiazhuang Post & Communication Technology Institutes,Department of Telecommunication Engineering,Shijiazhuang 050031,China)
A new type of laser simulation tactical training system is designed based on Zigbee.The design idea and implementation scheme of software and hardware are mainly introduced.The hardware of the system is based on STM32;the coded signals are transmitted to the receiving terminal by the laser.The interconnection and interworking among the control terminal of master station,the shooting unit and the target unit are achieved based on Zigbee wireless module.The master station can monitor the training situation,automatic identification and assessment of the damage situation,real-time display of the battlefield situation,which provides an important scientific means for the training effect.
Zigbee;laser;STM32;simulation tactical
1001-5078(2015)06-0616-05
河北省科技计划项目(No.13214710)资助。
吴蓬勃(1980-),男,讲师,硕士,主要研究方向为嵌入式系统开发,光电技术。E-mail:18931368610@189.cn
2014-09-03;
2014-09-16
TP277
A
10.3969/j.issn.1001-5078.2015.06.004
