基于图像处理的车牌定位算法研究
2015-11-24贾磊磊
李 玲 张 旭 贾磊磊
(洛阳师范学院物理与电子信息学院,河南 洛阳 471000)
基于图像处理的车牌定位算法研究
李 玲 张 旭 贾磊磊
(洛阳师范学院物理与电子信息学院,河南 洛阳 471000)
文章分析了车牌定位的常用算法,研究了车牌的颜色特征,提出了颜色分割算法来进行车牌区域的粗分割;通过边缘检测和形态学处理进行车牌精确定位和提取。Matlab仿真分析的结果表明,该算法可准确定位并提取车牌区域。
车牌定位;颜色特征;边缘检测;形态学
1 引言
国内外学者对基于图像的车牌识别进行了很多研究,但目前还没有一种车牌识别算法可以获得非常理想的识别效果。车牌的定位于提取是车牌识别的基础。车牌定位的常用算法有以下三种类型:
(1)基于边缘信息的定位方法:该方法主要通过分析图像垂直边缘的信息统计值,连接其邻近的离散化边缘信息,同时根据颜色分布特征进行选取,最后根据车牌固有的长宽比在剩余的待选区域中提取出真正的车牌区域。该方法比较繁琐,容易受到外部环境的干扰[1,2]。(2)基于形态学的定位方法:该方法主要是利用形态学的方法,将其腐烛、膨胀等填充处理后的点运算转化为线运算,从而使得运算速率和抗干扰能力都得到了极大地加强[3]。(3)基于颜色边缘信息的定位方法:该方法主要是对车牌区域内各种颜色在颜色空间中的取值范围采用二值化的方法进行处理,再采用空间聚类和投影的方法对形态学处理后的图像实现定位,此种方法定位效果较好[4-6]。
本文研究了车牌的颜色特征,车牌边缘检测及形态学操作,将颜色分割、边缘检测、形态学操作结合起来进行车牌的定位。
2 车牌的颜色分割
车辆牌照具有鲜明的颜色特征,以小型车为例,车牌的底色为蓝色,占车牌的大部分,车牌字符为白色,被蓝色的底色包围,可见,车牌颜色特征可以作为车牌粗分割的依据。因为环境光照、拍摄角度、拍摄距离、车牌清晰度等因素的影响,车牌图像的底色可能发黑、发暗,不是纯蓝色。
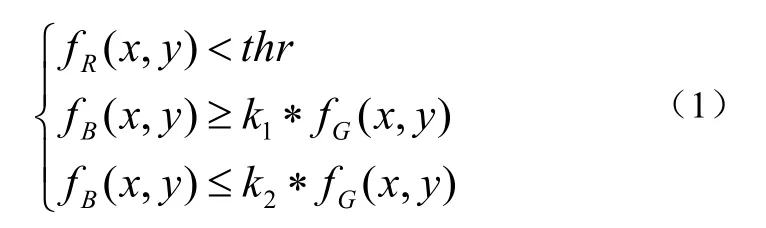
收集不同光照条件、不同拍摄角度、不同清晰程度的车牌图片进行统计分析,发现车牌底色的的蓝色分量较高,绿色分量较低,红色分量非常低,可以建立车牌底色的RGB空间颜色模型如公式(1)所示。
其中Rf、Gf和Bf分别代表车牌图像像素中的红色、绿色和蓝色分量,1k和2k两个参数界定了 RGB的范围,其统计值分别为2和4,可增大统计样本选取更合理的参数值,或设置一个宽松系数,增强模型的适应能力。随机选取两幅图片进行车牌颜色分割的仿真,原图和颜色分割后的图像如图1、图2、图3和图4所示。

图1 测试图片一

图2 图片一颜色分割结果

图3 测试图片二

图4 图片二颜色分割结果
可见,颜色特征准确有效的分割出了车牌区域,且颜色特征不受车体颜色的影响。如果是大型车、摩托车、警车或其他车型的拍照,车牌底色和字符颜色均有一定规定,因此也具有显著的颜色特征,同样可以使用类似的方法进行颜色分割。车牌字符被识别为干扰,但因为车牌字符位于车牌中间,被底色包围,所以不影响后续的车牌定位。图像中有不少干扰像素,孤立的干扰像素可通过滤波去除,但大片的干扰像素有必要进行进一步的处理。本文采用边缘检测和形态学操作,以尽量减少干扰,准确分割车牌区域,然后再使用投影法进行车牌定位。
3 车牌定位
3.1 边缘检测
边缘检测能够勾画出目标物体的形状,可反映目标物体的方向和灰度突变等,是图像识别中重要的图像特征之一,边缘是图像局部特性不连续的反映。
将颜色分割得到的图像灰度化后进行Canny边缘检测,结果如图5所示。

图5 Canny边缘检测结果
可见,Canny边缘检测得到的车牌边缘比较明显,可以显示车牌大体轮廓,但车牌边缘是不连续的,而且干扰的边缘信息很多,这不利于车牌定位。本文采用形态学处理来解决这个问题。
3.2 形态学处理
形态学处理中闭运算可以使图像的轮廓线更光滑,消除狭窄的间隙、细长的鸿沟和小的孔洞,并弥补轮廓线中的断裂;开运算可消除细小物体。腐蚀和膨胀是形态学的最基本操作。
对Canny边缘检测后的图像进行填充、消除与边界连通的物体后,使用闭运算、开运算和形态学滤波,得到的图像如图6和图7所示。

图6 闭开运算

图7 形态学滤波
经过闭运算和开运算处理后,断续的边缘被连通,车牌区域变得更加明显了,但干扰区域也同时被强化了。形态学处理后,比较小的干扰连通域被清除,剩余的干扰部分可在后续处理中消除。
3.3 车牌提取
经过颜色分割、边缘检测和形态学处理后的图像中,已经可以准确清晰的定位车牌区域了,且非零像素点集中在某些行和列上,可以根据这一特点进行车牌提取。对形态滤波后图像进行行、列方向上的像素点扫描,统计得到像素值和,据此确定车牌的起始位置和终止位置[7]。图8和图9为车牌在行、列方向上的像素点扫描结果,其中横坐标为行数或列数,纵坐标为某行或某列的像素值和。车牌行方向像素大概集中在750-950行,车牌列方向像素大概集中在1250-2070列,其它区域的像素为干扰。

图8 行方向像素点扫描
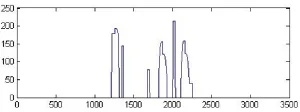
图9 列方向像素点扫描

图10 车牌区域
确定车牌的行列起始位置和终止位置后就可以提取车牌图像了,灰度化后的车牌图像如图10所示。可见提取出的车牌区域完整,排除了绝大部分干扰,效果良好;车牌铆钉和车牌边缘等干扰可在后续的车牌字符分割处理中进行消除。
4 结论
本文研究了车牌的颜色特征,根据颜色特征进行了车牌区域的粗分割,分割准确有效。然后对分割后的图像进行边缘检测和形态学处理,减少干扰并精确定位车牌区域。最后提取得到的车牌区域准确、完整,且干扰较少。
[1]张玲,叶海炳.一种基于边缘信息的改进车辆检测方法[J].重庆大学学报(自然科学版),2004, (11):56-58.
[2]钮圣虓,王盛.完全基于边缘信息的快速图像分割算法[J].计算机辅助设计与图形学学报,2012, (11): 1410-1419.
[3]左奇,史忠科.一种基于数学形态学的实时车牌图象分割方法[J].中国图象图形学报,2003, (3):281-285.
[4]张引,潘云鹤.彩色汽车图像牌照定位新方法[J].中国图象图形学报,2001, 6(4):374-377.
[5]沈勇,武章.专基于特征颜色边缘检测的车牌定位方法[J].仪器仪表学报,2008, (12):2672-2677.
[6]王洪建.基于颜色空间的一种车牌定位和分割方法[J].仪器仪表学报,2005, 26(8增刊):371-373.
[7]袁卉平.基于MATLAB的车牌识别系统的设计与研究[J].工业控制计算机,2010,23(10):73-74.
Research of license plate location based on emage processing
Firstly, algorithms commonly used are analyszed. Secondly, the color feature is studied, and color Segmentation is used for license plate segmentation roughly. Then, Canny operator and morphological operation are employed for license plate location and extraction precisely. Simulation results in Matlab show that the algorithm here can locate and extract the license plate correctly.
License plate location; color feature; edge detection; morphological operation
TN911;TP391
A
1008-1151(2015)05-0019-02
2015-04-15
李玲,洛阳师范学院物理与电子信息学院教师。
