基于着色Petri网的高速列车追踪运行过程建模与仿真
2015-11-24任国彬陈小强
任国彬,陈小强
(兰州交通大学自动化与电气工程学院, 兰州 730070)
基于着色Petri网的高速列车追踪运行过程建模与仿真
任国彬,陈小强
(兰州交通大学自动化与电气工程学院, 兰州 730070)
为了验证高速铁路移动闭塞系统(Moving Automatic System,简称MAS)结构完整性、控制逻辑正确性以及列车追踪运行的动态控制过程,利用着色Petri网建立移动闭塞条件下高速列车两车追踪运行控制过程的模型,采用相对制动方式下基于追踪效率最高的区间追踪间隔原理,设计了控制策略决策模块,模拟列车牵引加速、惰行以及减速运行等控制过程,研究MA更新周期变化对列车追踪控制的影响。仿真结果表明所建立的模型可以有效描述MAS下高速列车追踪运行控制过程,且MA更新的周期越小,列车的行为控制越灵敏,达到预期控制目标所需要的时间更短,满足行车安全性、高效性要求。仿真结果将为MAS在高速铁路中的实际应用提供理论指导。
高速列车;移动闭塞系统;着色Petri网;追踪运行;控制过程;建模与仿真
1 概述
移动闭塞是一种区间不分割,通过连续检测先行列车位置和速度,进行列车间隔控制,确保后续列车不会与先行列车发生冲突的列车安全控制系统[1]。
根据我国铁路列控系统发展战略规划的要求,CTCS-4级列控系统中将会采用移动闭塞技术。因而有必要搭建一个仿真模型,对MAS系统进行验证。Petri网是一种可以用图形表示的数学对象,用于描述事物之间的依赖关系,包括因果关系,包括存在于物理系统中的控制机制(如交通控制)[2]。对于具有异步并发特点的列车运行控制过程构造Petri网模型,对其进行仿真分析,即可得到有关系统结构和动态行为方面的信息,根据这些信息对列控系统进行评价和改进[3]。
在分析MAS大量理论研究的基础上[4-7],根据高速铁路准移动闭塞制式下列车运行控制各项数据指标的要求,利用Petri网仿真工具CPN Tools建立移动闭塞条件下两车追踪运行控制模型,仿真研究高速列车运行控制过程。
2 追踪间隔原理分析
移动闭塞系统中两追踪列车之间的间隔距离通常有两种方式,即绝对制动方式和相对制动方式。列车追踪间隔模型分别如图1、图2所示。

图1 移动闭塞绝对制动方式下追踪间隔模型
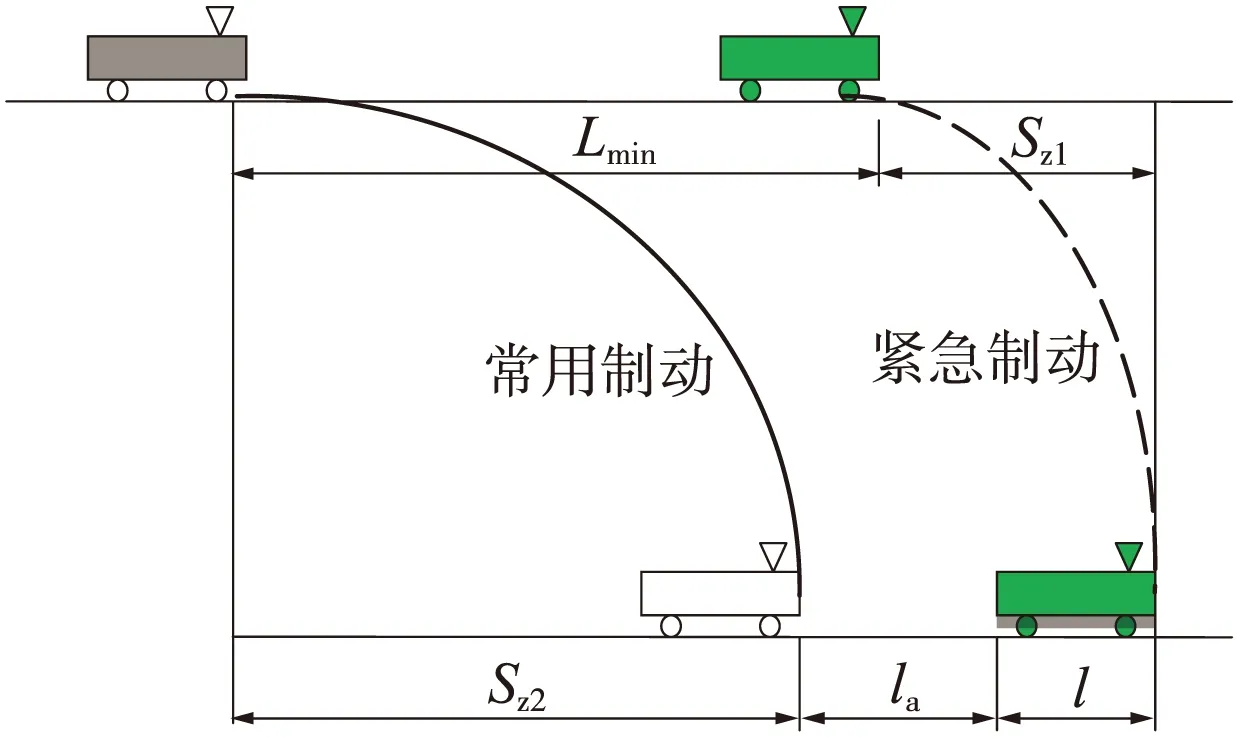
图2 移动闭塞相对制动方式下追踪间隔模型
绝对制动方式只考虑前行列车的位置,不考虑其速度。绝对制动方式下的列车最小追踪间隔距离Lmin为
相对制动方式根据先行列车的速度和位置进行间隔控制。相对制动方式下的列车最小追踪间隔距离Lmin为
其中,la为安全保护距离;l为列车长度;SZ1为前行列车紧急制动距离;SZd、SZ2为追踪列车常用制动距离;v1为前行列车运行速度;v2为追踪列车运行速度;a1为前行列车紧急制动减速度;a2为追踪列车最大常用制动减速度。
3 追踪运行控制过程建模
根据移动闭塞系统下列车追踪间隔原理的分析,利用CPN Tools工具建立区间两车追踪运行的CPN模型。
3.1 列车追踪顶层模型
顶层模型主要体现了移动闭塞条件下两车追踪的系统过程,顶层模型结构如图3所示。模型中包括3个替代变迁:database,train1以及train2。train1、train2分别模拟前行列车与追踪列车,两列车子模型并行运行;database用于模拟车地之间数据信息的传递。替代变迁用对应的子页描述各模块详细的控制过程。模型中,右半部分的库所v1,p1 and n用于体现车载定位信息向地面的传递过程,库所compute MA1、send train1 MA以及变迁train1 MA用于体现地面计算前车MA信息并发送给列车的过程。左半部分对应为后行列车与地面之间的信息交互过程。不同的是,右半部分中的变量n为列车位置报告更新周期数,列车位置报告周期分别取500,400 ms。ATP的设置方法采取车载自律式,即:RBC只按照前车传回的位置发送行政许可,不对后行列车最大允许速度、加速度进行计算[6]。

图3 两车追踪顶层模型
3.2 两车追踪后行列车模型
后行列车控制模块主要体现了车载ATP计算最小运行间隔Lmin以及后车的控制加速度,并计算后车速度及位置变化。另外,为了增强旅客乘坐的舒适性,模型中加入了惰行段,惰行系数为d(d=0.2),加入惰行段后区间追踪间隔距离LD为
后行列车子模型结构如图4所示。
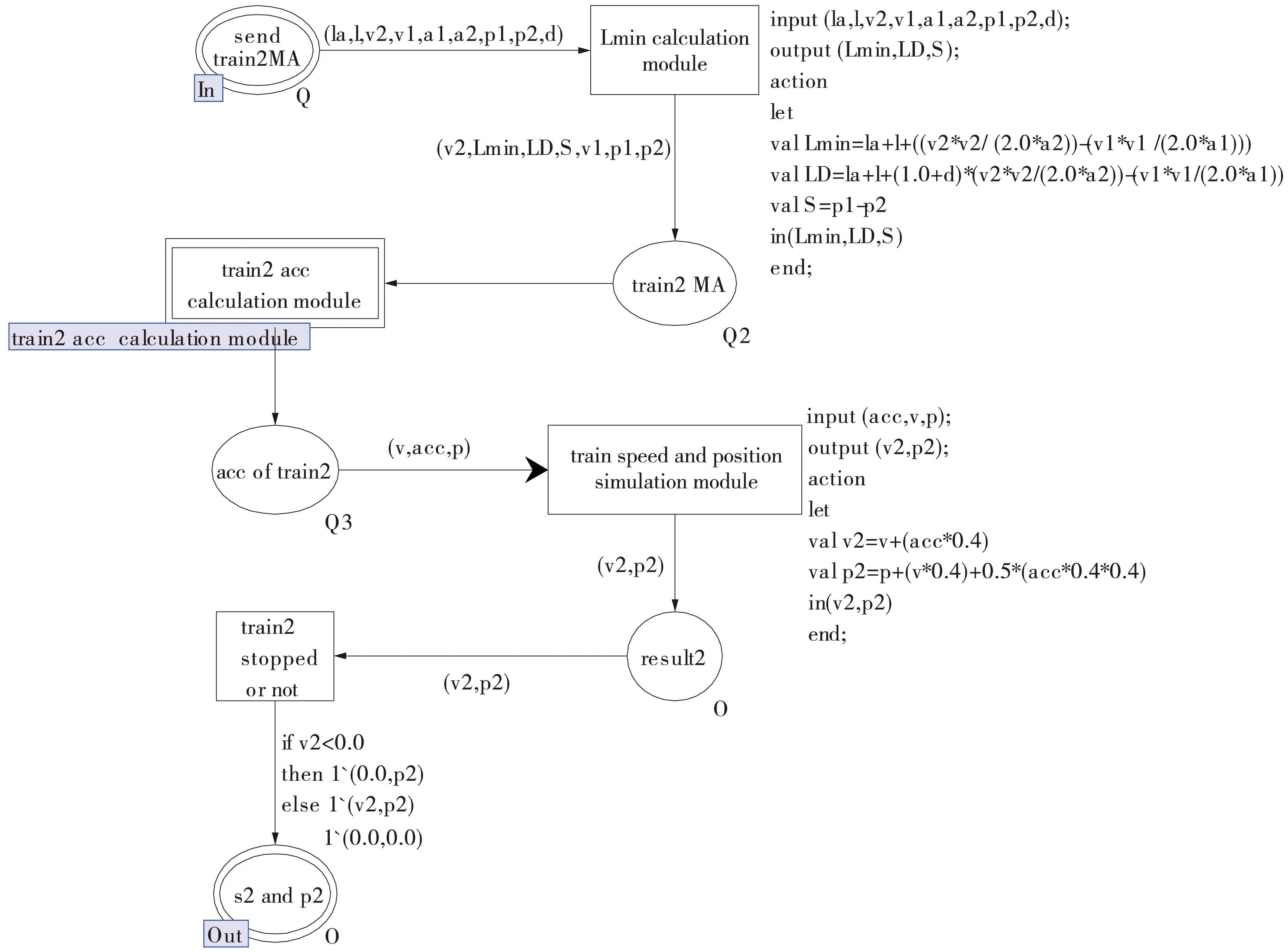
图4 后行列车运行控制模型
图4中存在一个替代变迁train2 acc calculation module,该子模块为追踪列车控制策略决策模块,控制列车制动、牵引加速或者惰行运行。追踪列车控制策略决策模型如图5所示。

图5 追踪列车控制策略决策模型
4 仿真及结果分析
4.1 状态空间分析
状态空间报告反映的主要属性有有界性、回归性、活性等。通过分析这些属性可以发现系统中存在的错误。由于原模型状态空间太大不便于计算,同时为了不影响状态空间报告所包含属性含义的正确性,在简化模型的过程中不改变模型结构,只将模型的循环周期减少到1个周期。简化后计算结果如表1、表2所示。
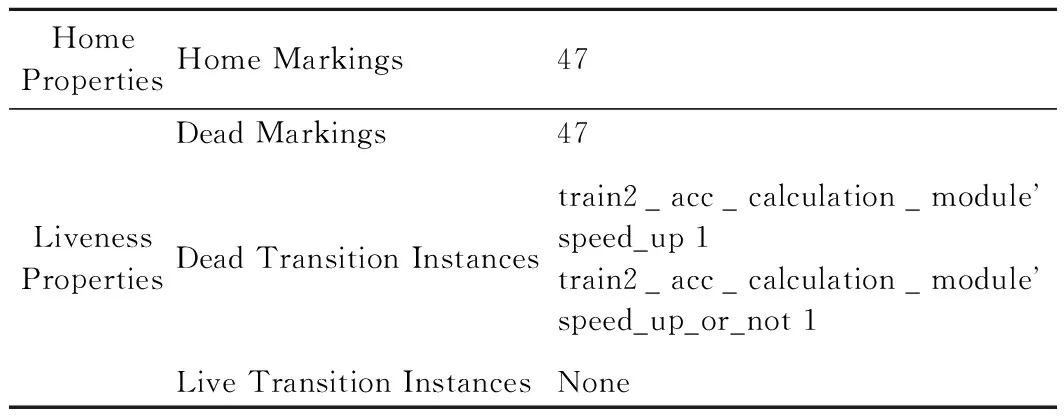
表1 状态空间回归性、活性报告
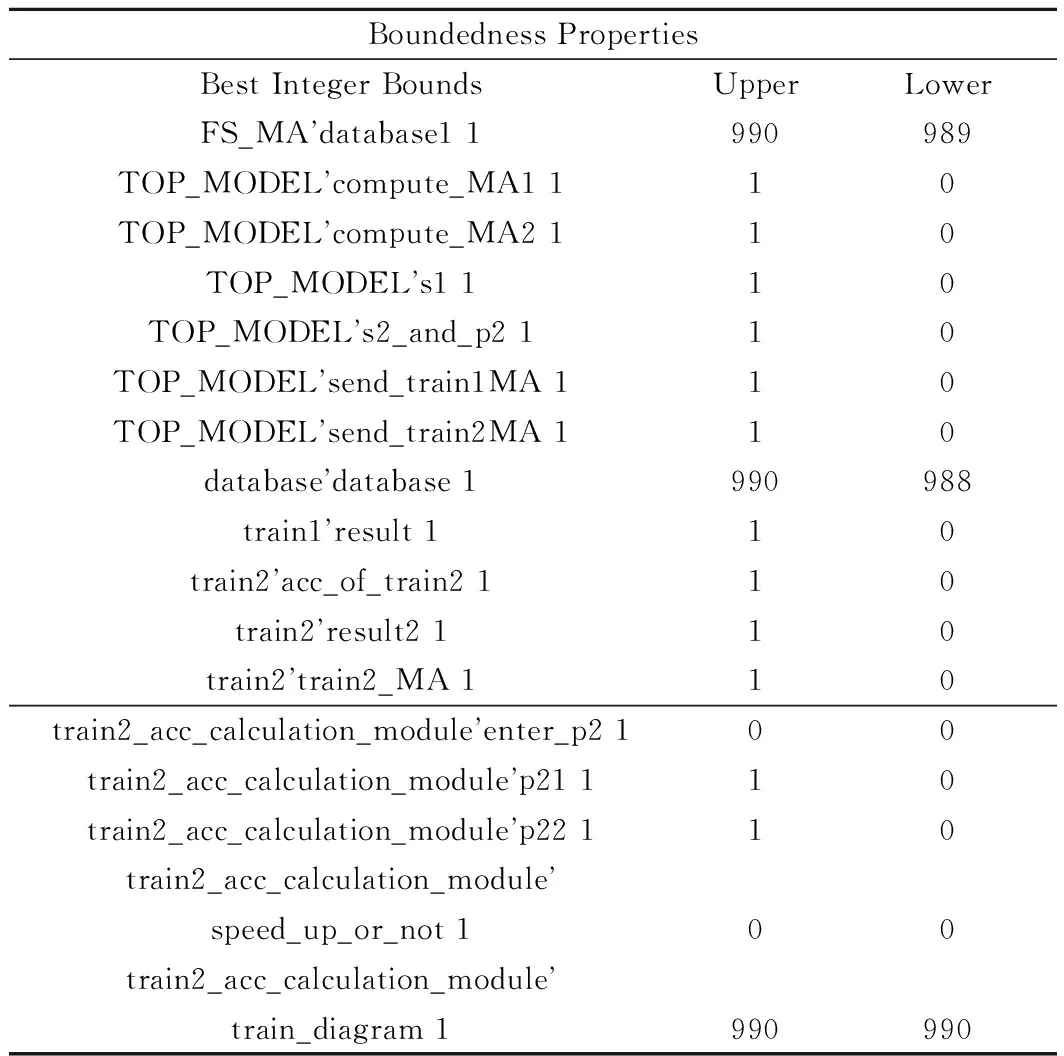
表2 状态空间有界性报告
从表1可以看出,模型中有一个回归标识,一个死标识,节点号均为47,回归标识即:任意可达标识均可回归到该标识;死标识是一种无法使变迁使能的标识。由于节点号为47的标识既是回归标识,又是死标识,这使得计算结果通常正确无误[8]。另外,表1中存在两个死变迁,这是由于模型简化以后控制过程不存在加速阶段造成的。因而,整个系统的活性满足要求。
表2是状态空间有界性报告,反映了模型中各库所token数目的最大值与最小值。从表2可以看出,模型中任意位置均有上下界,满足有界性要求。
4.2 仿真案例
仿真案例:train1、train2均以85.83 m/s (309.0 km/h)的速度匀速追踪运行5s,前、后车初始位置分别为9 084.0、1 000.0 m,此后train1以-1.009 8 m/s2的减速度减速运行30 s,再转匀速运行5 s后,以0.3 m/s2的加速度加速运行93 s,再匀速运行5 s,最后以-1.1 m/s2的减速度紧急制动停车。此外,仿真设定后行列车一直处于晚点状态。仿真分析此情形下train2的行为调整变化。情形一:列车位置更新周期为500 ms;情形二:列车位置更新周期为400 ms。仿真结果如图6~图9所示。
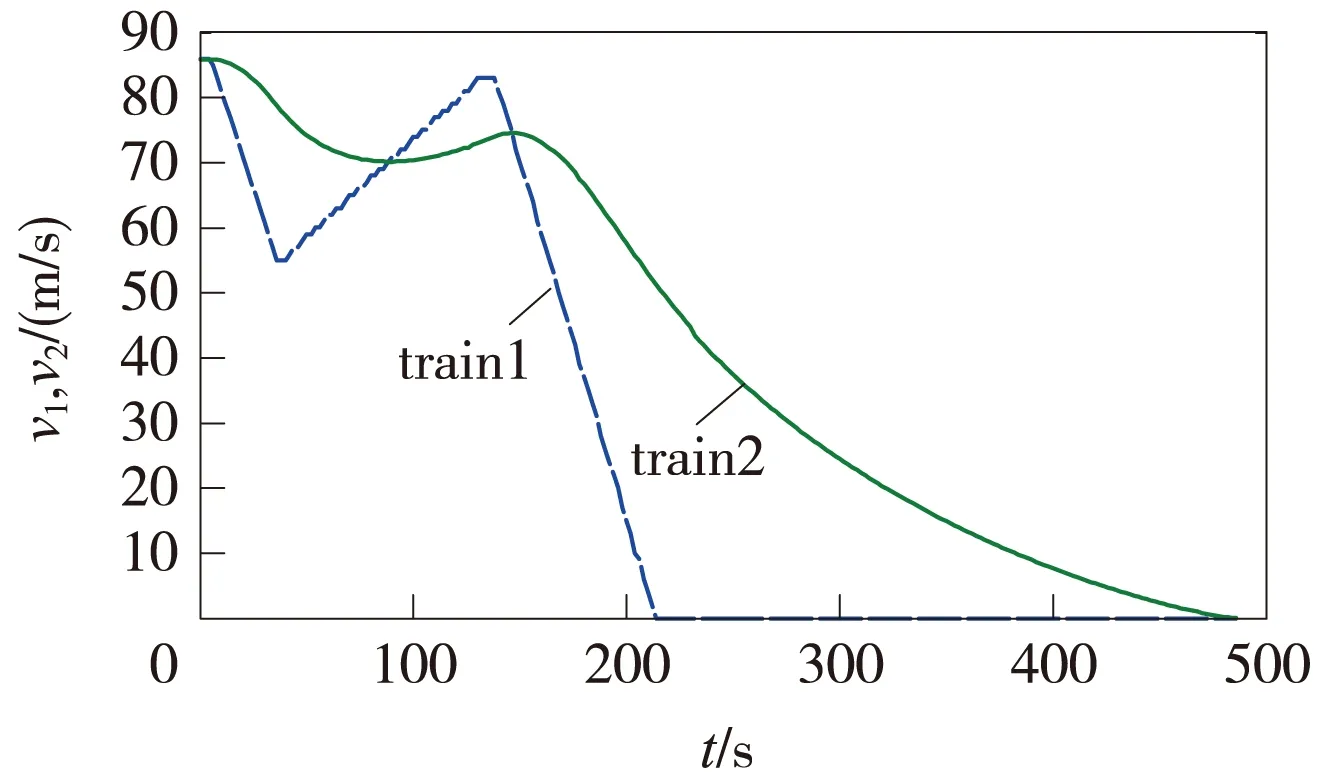
图6 前后车速度变化

图7 前后列车速度-位置
由图6、图7可以看出:后车速度随前车速度变化而变化,且速度调整在时间上滞后于前车速度变化;后车速度曲线更平缓,旅客乘坐的舒适性要求提高。


图8 两种情形下train2速度变化

图9 两种情形下两车运行间隔变化
图9中可以看出,在两车间隔逐渐减小的区段,列车位置更新周期越小,两车间隔减小的越快;在两车间隔逐渐增大的区段,列车位置更新周期越小,两车间隔增大的越快。最终,情形一下train2停车时与前车的间距为530.0 m,而情形二下train2停车时与前车的间距为485.69 m。列车运行间隔变化满足安全性及高效性要求。
5 结论
利用CPN Tools工具建立了高速列车MAS条件下的两车追踪模型,引入了惰行段提高了旅客乘坐的舒适性要求,仿真研究了列车位置更新周期对列车追踪运行安全性及高效性的影响。结果表明,该模型满足系统活性、有界性要求,且列车位置更新的周期越小,列车的行为控制越灵敏,满足行车安全性、高效性要求,因而,模型可以有效描述MAS下高速列车追踪运行控制过程。
[1] 陈微,邹仕顺,辛骥.基于移动闭塞的列车追踪及其安全性分析[J].铁道通信信号,2009,45(4):18-20.
[2] 袁崇义.Petri网原理与应用[M].北京:电子工业出版社,2005:1-4.
[3] 邓紫阳.基于着色Petri网CTCS-3级列控中心建模与仿真研究[D].北京:北京交通大学,2009.
[4] 潘登,郑应平.高速列车追踪运行的控制机理研究[J].铁道学报,2013,35(3):53-61.
[5] 陈磊,宁滨,张勇,等.基于有色Petri网的CBTC系统列车追踪过程建模与仿真[J].系统仿真学报,2009,21(3):637-641.
[6] 张伟华.移动闭塞条件下高速列车运行间隔研究[D].北京:北京交通大学,2009.
[7] 梁楠.基于随机Petri网的CTCS-3级RBC系统控车流程建模与分析[D].北京:北京交通大学,2009.
[8] 曹源.高速铁路列车运行控制系统的形式化建模与验证方法[D].北京:北京交通大学,2011.
[9] 张爱玲.CTCS-3级列控系统RBC行车许可生成的形式化建模与分析[D].兰州:兰州交通大学,2012.
[10]中华人民共和国铁道部.铁道部科技运[2008]34号CTCS-3级列控系统总体技术方案(V1.0)[S].北京:中国铁道出版社,2008.
[11]宁滨.轨道交通系统中的列车运行追踪模型及交通流特性研究[D].北京:北京交通大学,2005.
[12]Kurt Jensen,L.M.Kristensen, L.Wells. Coloured Petri Nets and CPN Tools for modelling and validation of concurrent system[J]. Springer, 2007:238-241.
[13]Kurt Jensen, Lars M. Kristensen.Coloured Petri Nets[M]. Springer-Verlag Berlin Heidelberg, 2009:43-77.
[14]周艳红,唐金金.高速列车追踪运行过程仿真方法研究[J].铁道标准设计,2012(8):116-120.
[15]魏倩,陈永刚.城轨列车运行调整问题的模糊优化设计研究[J].铁道标准设计,2013(3):125-128.
Modeling and Simulation of High-speed Train Tracing Movement Based on Colored Petri Nets
REN Guo-bin, CHEN Xiao-qiang
(School of Automation and Electrical Engineering, Lanzhou Jiaotong University, Lanzhou 730070, China)
In order to verify the structural integrity and correctness of the control logics and the dynamic control processes of train tracking operation of high-speed railway Moving Automatic System, the Colored Petri Nets is used to establish a model of the control processes of two trains tracing one after another. The theory of relative braking method and the highest tracing efficiency method are employed to design the control strategy decision module to simulate train acceleration, coasting and braking processes and to study the influence on the train tracing control generated by the changes of MA update cycle. Simulation results show that the model established in this paper can effectively describe the control processes of train tracking operation under the MAS condition and the smaller the MA update cycle, the more sensitive the train movement control, which meet the requirements for less time, safe and efficient operation. The results of simulation may serve for future application of MAS in high-speed railway operations.
High-speed train; MAS; Colored Petri Nets; Tracking operation; Control process; Modeling and simulation
2014-05-28
铁道部科技研究开发计划课题(2011X008-D)
任国彬(1989—),男,硕士研究生,E-mail:1083378722@qq.com。
1004-2954(2015)03-0122-04
U238; U284.44
A
10.13238/j.issn.1004-2954.2015.03.029