基于无线通信的预应力张拉控制系统研究*
2015-11-23周德俭冯志君周昊辉
张 巍,周德俭,2,冯志君,周昊辉
(1.广西科技大学机械工程学院,广西柳州 545006;2.桂林电子科技大学机电工程学院,广西桂林 541004)
0 引言
预应力张拉的主要方法之一,就是通过千斤顶拉紧预应力筋,预先给桥梁或构件施加应力,使桥梁或构件产生向上的拱度,以提高桥梁或构件的承受能力。国家对预应力张拉和预应力筋的张拉过程都有相关规定和要求,要想使预应力张拉达到相关规定和要求,预应力筋的张拉控制精度至关重要。张拉控制精度包括张拉过程中对张拉应力、张拉伸长量的控制精度,同时也包含两端张拉时,两端千斤顶的张拉、持荷和卸载过程的同步精度。一旦预应力张拉精度失控,轻则会引起结构出现锚固端的纵向裂纹、反拱过大,重则引起结构出现横向裂缝、预应力筋拉断等事故[1-2]。
现阶段太原理工大学和相关工程单位对预应力张拉设备都有一定的研究,所设计的张拉设备大都采用PLC或PC机作为张拉控制系统的主控制器,系统通过主控制器对两端张拉设备进行控制。然而这种方式只能保证预应力筋张拉应力、张拉伸长量的控制精度以及双端张拉时起步阶段的同步性,随着张拉的进行,两端张拉设备的后期同步性将很难保持。对此,笔者设计一种基于nRF401无线通信模块的预应力张拉控制系统。该系统由ARM控制器、触摸屏、显示屏和nRF401无线模块组成张拉控制系统的主控机,次控机则由AVR单片机控制板和nRF401无线模块,电源模块等构成。使用该设备,技术人员只需要在触摸屏上输入张拉参数及控制命令,系统便由ARM控制器发出指令,通过无线模块传递到次控机执行相应动作;次控机采集到的张拉力和伸长量通过无线模块传递到主控机进行显示处理;同时在整个张拉过程中两端张拉仪相互通信,进行同步性判断,若不同步则采取相应调整动作使其同步。
1 预应力张拉控制系统总体结构
该张拉控制系统采用主、次控机体系结构。如图1所示,控制系统中的主控机通过nRF401无线模块对两端的次控机进行控制,次控机接收到命令后,对液压系统执行相关命令、采集张拉数据并传输到主控机处理显示,同时次控机之间也可相互通信,用于张拉过程中的同步判断。
1.1 预应力张拉控制系统主控机结构
主控机在预应力张拉控制系统中负责对两端次控机进行控制以及人机交互。用户通过主控机选择张拉控制命令和输入张拉控制参数后,无线通信模块将张拉控制命令和参数发送到两端次控机,实现预应力张拉控制系统的主次控制。同时主控机还接收来自次控机的张拉控制数据,并进行处理显示。如图1所示为预应力张拉控制系统主控机结构框图,主要包括:主控芯片S3C2440、存储器SDRAM和NandFlash、触摸屏、显示屏、电源模块、打印接口、网络接口、USB接口以及nRF401无线通信模块接口。
1 .2 预应力张拉控制系统次控机结构
次控机作为整个张拉控制系统中至关重要的一部分,在主控机与液压系统之间起着承接作用。次控机接收主控机的控制命令,对液压系统进行控制;同时次控机采集张拉千斤顶处传感器信号,发送张拉数据到主控机。如图1所示,次控机主要由AVR单片机中的 ATmega128芯片、LCD1602显示屏、nRF401无线模块接口、串口通信、电源模块、D/A转换电路、I/V转换电路、运算放大电路、光耦隔离驱动电路、传感器等组成。
2 预应力张拉控制系统的控制方案
预应力张拉控制系统控制方案主程序流程图如图2所示。用户开机后,在主控机上输入张拉参数、选择张拉命令,通过无线模块传输到次控机,控制次控机开始工作;次控机首先获取液压系统的初始状态,满足预设条件则进行分级加载,达到预应力筋的初应力后不断进行张拉数据的记录和同步判断,张拉继续,直到达到张拉设定值再按要求持荷,最后回油卸载,张拉成功。整个张拉过程中,出现不符合条件的情况,都将进行报警处理。
3 无线通信模块系统设计及同步实现
无线通信模块作为张拉控制系统主次控制、张拉同步判断实现的关键模块。需要从无线模块硬件设计、无线模块软件设计两方面进行展开研究。无线模块软件部分又包括无线模块发送、接收程序,以及张拉同步判断中断子程序。
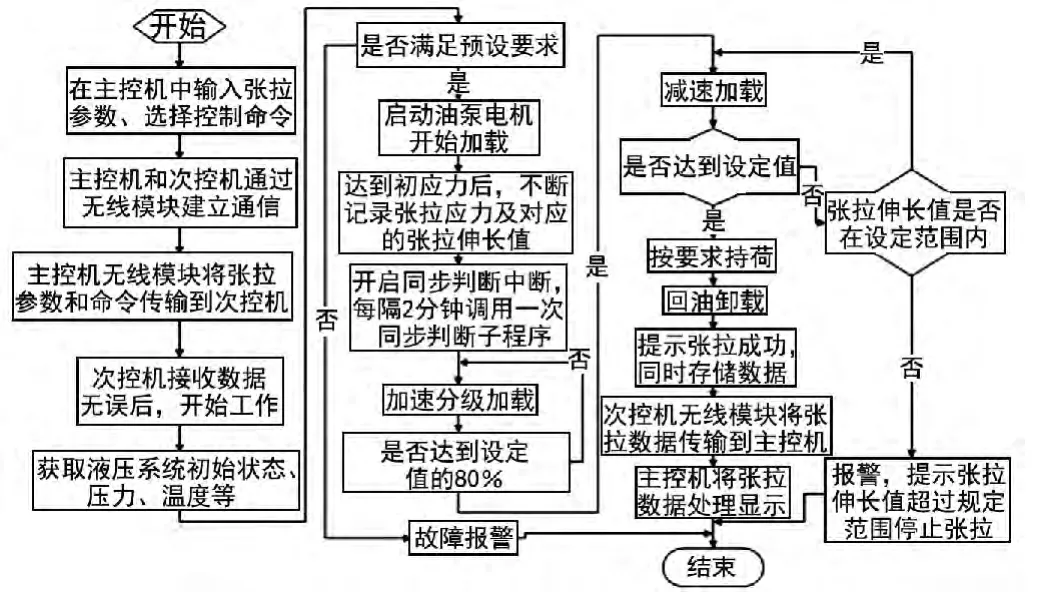
图2 预应力张拉控制系统张拉主程序
3.1 无线通信模块的硬件设计
预应力张拉控制系统无线通信模块选用的是nRF401芯片,nRF401是挪威NORDIC公司推出的半双工单片无线收发一体的芯片。该芯片采用蓝牙核心技术设计,在一个20脚的芯片中包括了高频发射、高频接收、PLL合成、FSK调制、FSK解调、多频道切换等模块。有工作频率稳定可靠,通信速率高,功耗低,可直接与单片机串口通信,无需复杂的曼彻斯特编码,适合于便携及手持产品的设计等特点[4]。图3为nRF401无线模块的电路原理图,模块引出五个引脚,分别为:VDD、GND、TXEN、PWR、DIN、DOUT、CS。TXEN为工作状态控制引脚,为1时选择发送模式,为0时选择接收模式;PWR为节能控制引脚,为1时选择工作状态,为0时选择待机微功耗状态;DIN数据输入引脚;DOUT数据输出引脚;CS频道选择引脚,为1选择频道2,为0选择频道1;VDD为无线模块电源引脚,最小只需2.7 V的直流电压;GND为无线模块的电源地引脚。

图3 nRF401无线模块电路原理图
3 .2 无线通信模块的软件设计
3.2.1 无线通信模块收发程序设计
张拉控制系统要实现主次模式的无线控制除了需要无线模块的硬件支持,另一个关键点在于无线模块收发程序的设计。无论是主、次控制还是次控机间的通信都是建立在无线模块的收发程序基础上。如图4所示,无线模块的发送程序基本流程为:主控机首先向所有次控机发送地址帧对通信的次控机进行呼叫,并等待。发送地址后,主控机接受应答,如果应答信号中的地址与前面发送的地址不相同,主控机将重新发送址帧呼叫,如果相同,则发送命令帧,接受命令应答帧。无线模块的接受程序基本流程为:次控机首先处于接受等待状态,接受主控机发送的地址帧与自己的ID地址进行比较。若相同则发送地址应答帧,接受命令帧,调用命令子程序;若不同,则重新进入接受状态,接收地址帧[5]。
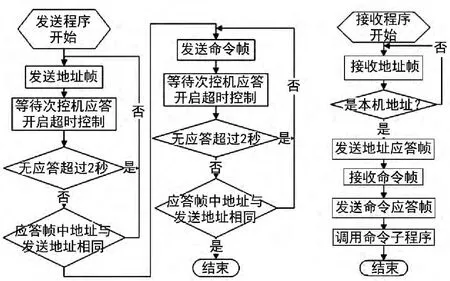
图4 无线模块发送、接收程序流程
3.2.2 无线通信模块张拉同步实现
现有预应力张拉控制系统已经不需要像传统张拉控制那样通过喊话或吹口哨同步启动两端张拉控制,保证张拉系统起步阶段的同步性。但随着张拉的进行,两端张拉又会出现不同步的现象,这同样会影响张拉筋的张拉质量。本控制系统在保证张拉系统同步启动的同时,利用两端次控机在张拉过程中相互通信的方式进行张拉同步判断。具体实施方案为:选用两端次控机中的一端作为同步判断的主控端,当主控端张拉达到初应力之后进行短暂停顿,开启中断,每隔2 min调用一次同步判断子程序直至达到张拉预设值。如图5所示,在无线模块发送、接收程序及通信协议的基础上设计了张拉同步判断中断子程序。同步判断子程序开始执行后,主控端通过无线模块发送同步判断请求,另一端接收到命令后发送预应力筋的张拉压力和位移到主控端,主控端将其和自身张拉数据进行对比,如果两端张拉的压力和位移相差超过2%或5 mm,则数据大的一段保持原有张拉速度,而另一端则加大张拉速度直至两端张拉达到同步要求,再返回主程序继续张拉[3]。
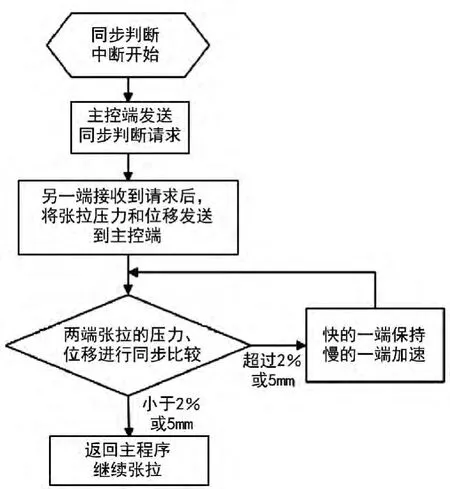
图5 张拉同步判断中断子程序
4 结语
本预应力张拉控制系统采用ARM控制器作为主控机、AVR单片机作为次控机。利用nRF401无线通信模块实现主控机对两端次控机的控制、两端次控机向主控机数据的传输,以及两端次控机在张拉过程中通过无线通信实现张拉同步性的判断。采用本系统的控制方案在保证张拉精度的同时,也能够进一步解决两端张拉同步性问题。
[1] 郝志红.全自动预应力张拉仪的研究[D].太原:太原理工大学,2007.
[2] 蒙志强.基于ARM的轨枕张拉系统设计[J].电子设计工程,2013,21(18):182-184.
[3] 梁晓东.智能型同步预应力张拉系统的研制[J].中外公路,2013,33(5):106-107.
[4] 张 健.nRF401在多路无线温度数据采集系统中的应用[J].制造业自动化,2005,27(12):509.
[5] 陈 然.汽车轮胎检测及控制系统的研究[D].重庆:重庆大学,2005.
