基于Pro/E的变速器柔性操纵机构在装载机上的应用
2016-01-08钱久年
基于Pro/E的变速器柔性操纵机构在装载机上的应用*
钱久年
(上海铁路局淮南货运中心,安徽 淮南232001)
摘要:参照部分装载机变速器操纵机构的结构参数,结合人机工程学相关知识,基于Pro/E环境下设计的双杆柔性远距离换挡操作机构,模型形象直观,结果提取方便,可直接转换成工程图,设计效果良好。
关键词:变速器;Pro/E;柔性操纵机构;设计
中图分类号:文献标志码:A
收稿日期:*2014-01-13
作者简介:钱久年(1977-),男, 安徽蚌埠人, 工程师,主要从事铁路装卸机械管理方面的工作。
Application of Flexible Control Mechanism of Transmission in Loader Based on Pro/E
QIAN Jiu-nian
(HuainanCargoTransportationCenter,ShanghaiRailwayAdministration,HuainanAnhui232001,China)
Abstract:Referring to the structural parameters of loader transmission operating mechanism, and combining with the ergonomics knowledge, the double pole flexible remote shift operating mechanism is designed based on the Pro/E in this paper. The model is visual and intuitive, and the result is easily to be extracted and can be directly converted into the engineering drawing, thus the design method is effective.
Key words: transmission; Pro/E; flexible control mechanism; design
0引言
作为装载机变速器控制机构的操纵机构,由驾驶者直接操纵,完成高速档与低速档的选择和实现换挡或退到空挡的功能[1],在设计中只是一个相对较小的装置,但是它对装载机正常行驶有着十分重要的影响,在设计时不但要考虑到结构功能安全性方面要求,还需要考虑到舒适性方面要求,因此其在变速器的设计中占有重要的地位。作为变速器换档操纵机构的控制装置,关系到装载机能否正常行驶。设计一套合理、工作可靠的换档操纵机构是装载机行驶不可缺少的一部分。近些年来,装载机变速器操纵机构有向着自动化操纵方向发展的趋势。
1组成与原理
在某些装载机上驾驶者座椅位置距变速器总成较远,有时驾驶室也需要翻转,根据总布置要求,必须选用远距离操纵方案。装载机变速器远距离操纵机构包括外部操纵机构和内部操纵机构两部分。如图1所示。外部操纵机构用来实现对变速器的远距离操纵,包括从变速杆到选、换档轴之间的所有传动件;内部操纵机构保证挡位安全选择及锁定,包括选档换档轴、拨叉、拨叉轴、自锁装置、互锁装置和倒档锁等。柔性操纵机构与一般的连杆机构相比,具有零部件少、布置清晰;体积小、结构较为简单、重量轻;操纵灵活,易于调整;工作效率高,噪声较低,较经济等许多优势[2-3],因而获得到装载机制造厂和设计人员的青睐。在进行操纵机构设计时,设计难点在于要保证操纵机构的正常工作或要能适应驾驶室翻转,在换档过程中因驾驶员和换档操纵机构直接接触,所以设计的换档机构必须考虑人机工程学的因素。

图1 远距离操纵手动换挡变速器的工作原理图
2设计方法
本次设计基于Pro/E提供了一个基于过程的虚拟产品开发设计环境,采用自顶向下(Top-down)方法进行设计,利用Pro/E软件工具构建一个完善的Top-down设计环境,确定设计思想并进行总体布局,通过建立骨架来确定产品结构、安装位置、空间位置,设计骨架模型并发布出版几何,然后进行外部复制几何,确定位置关系等,再进行各零部件设计[4]。目前,随着装载机CAD技术的发展,实际设计中多采用二维设计与三维设计相结合的方法进行装载机的总体设计和各分系统的设计[5]。根据变速器操纵机构特点确定设计特征顺序,构建骨架模型,并简化特征类型,确定特征之间父/子关系,根据实际情况在设计中,参照选取原则依据“能选面不选线,能选线不选点”的进行设计。
3模型建立
确定设计方案为双杆远距离柔性操纵机构(5挡位变速器),使用锁销式同步器换档;操纵机构中设有安全装置(自锁装置、互锁和倒档锁),选用锁球式互锁装置,倒档锁采用弹簧锁销式。图2为设计完成的变速器双杆远距离柔性操纵机构。
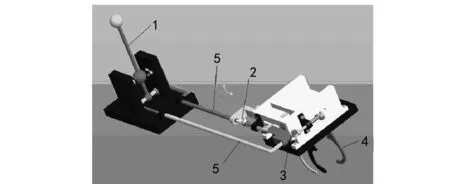
图2 变速器双杆远距离柔性操纵机构 1.操纵杆 2.选档软轴 3.换档软轴 4.拨叉 5.软轴套
双杆远距离柔性操纵机构是利用一种推拉式软轴代替刚性拉杆进行远距离操纵,此软轴由芯轴和护套组成,其芯轴由增加了斜绕钢带的多根钢丝组成,外护套由多根细钢丝斜绕而成,与此同时增加有内护管。也有的把斜绕钢带增加在外护套中以提高软轴承载能力,但这种结构会在一定程度上影响软轴弯曲性能。此柔性机构的操纵杆及支座总成一般布置在驾驶室地板上,其功能和双杆刚性机构中的操纵杆及支座总成类似,区别在于增加了软轴支撑的设计,在其后部通过软轴支架与变速器总成的选档臂和换档臂相连,来实现其操纵功能。
根据人机工程学要求提供的我国成年人人体的基础数据,参照GB10000—88是1989年开始实施的我国成人人体尺寸国家标准,在布置操纵机构时必须考虑驾驶员变换姿势情况,适应操作人员的正常人体结构尺寸和生理要求[6]。这些人体数据为操纵机构的合理设计提供了强有力的设计依据,本次操纵机构的设计,依据人体尺寸数据,考虑操作人员的操作安全性和舒适性,参照目前国产某型货车操纵机构进行设计,设计中有的数值根据实物测量比较并进行修正获得。图3、图4为根据人机工程学原理,考虑人体尺寸而设计的变速器的自锁及互锁装置和锁销式倒挡锁装置,图3(a)为原理图,图3(b)为设计的模型。
根据人机工程学要求,参考已成型操纵机构,此次设计的前进档的行程是13 mm ,变速器操纵机构力的传动比为7,操纵杆直径为13 mm,操纵杆中间轴直径为9 mm,进行刚度和稳定性校核,均符合要求。在操纵过程中,不考虑变形, 手柄前进或后退时挂档的运动行程均设置为91 mm;静态换档力为465 N,在不考虑摩擦、防尘套变形的情况,手柄操纵力设计为66 N;选取设计的操纵杆长度为360 mm;操纵杆前后运动范围的角度设置为20°;左右运动范围的角度设置为15°。在此次设计中选取的换档摇臂长度80 mm;换档力矩15 N·m;选档摇臂长度设置为80 mm ;换档力矩25 N·m;换档摇臂前、后运动最大角度设置为25°;选档摇臂向前运动最大角度设置为20°,向后运动最大角度设置为15°。图5、6为设计的操纵杆模型。
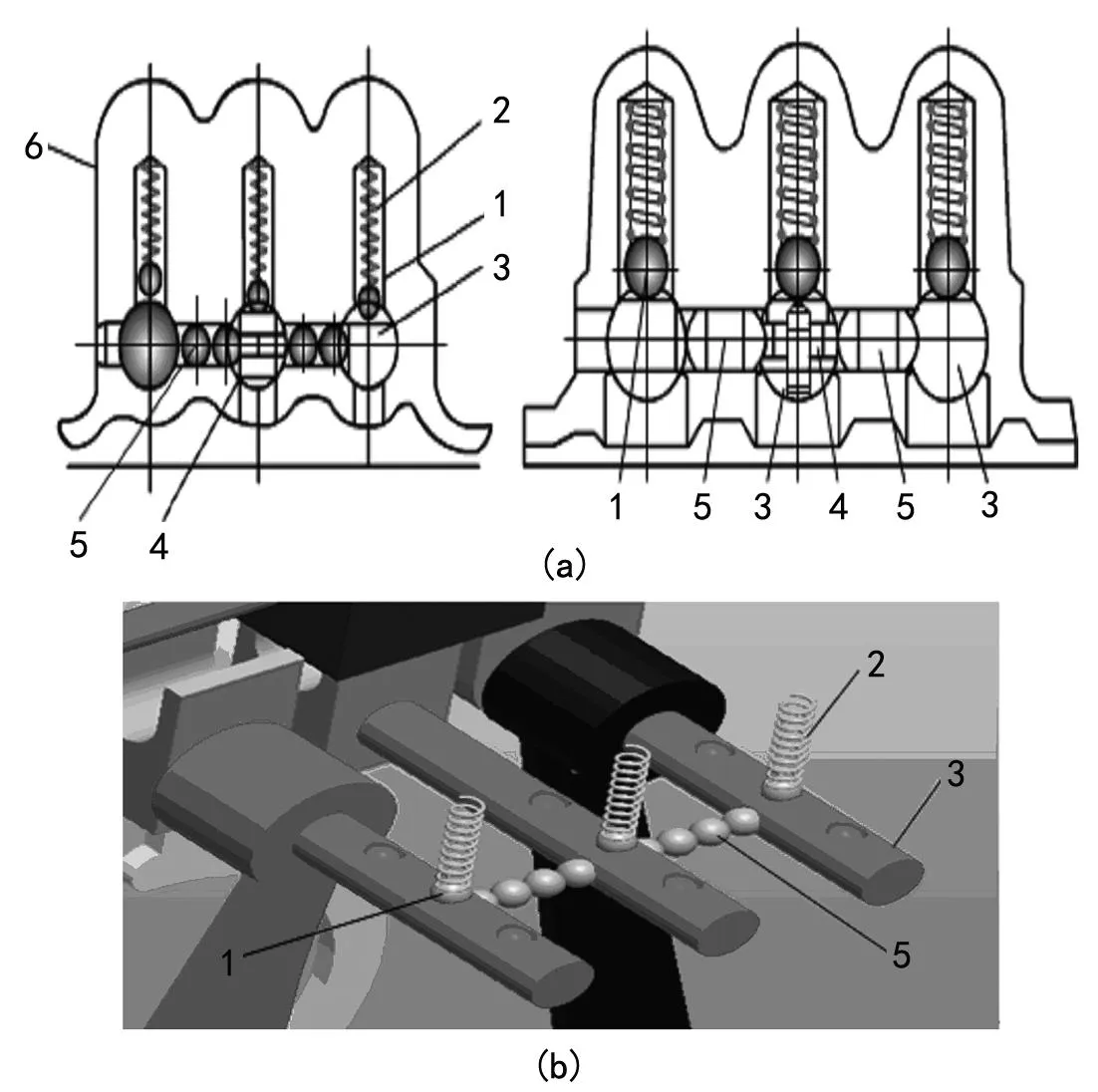
图3 变速器的自锁及互锁装置 l.定位钢球 2.定位弹簧 3.拨叉轴 4.互锁顶销 5.互锁钢球(或互锁销) 6.变速器盖
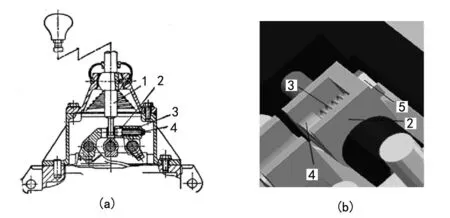
图4 锁销式倒档锁装置 l.变速杆 2.倒档拨块 3.倒档锁弹簧 4.倒档锁销 5.锁销锁片

图5 操纵杆模型 图6 操纵杆
根据总布置要求和变速器操纵机构已确定的位置关系,进行各个零件设计,图6~17为设计的各零部件模型。
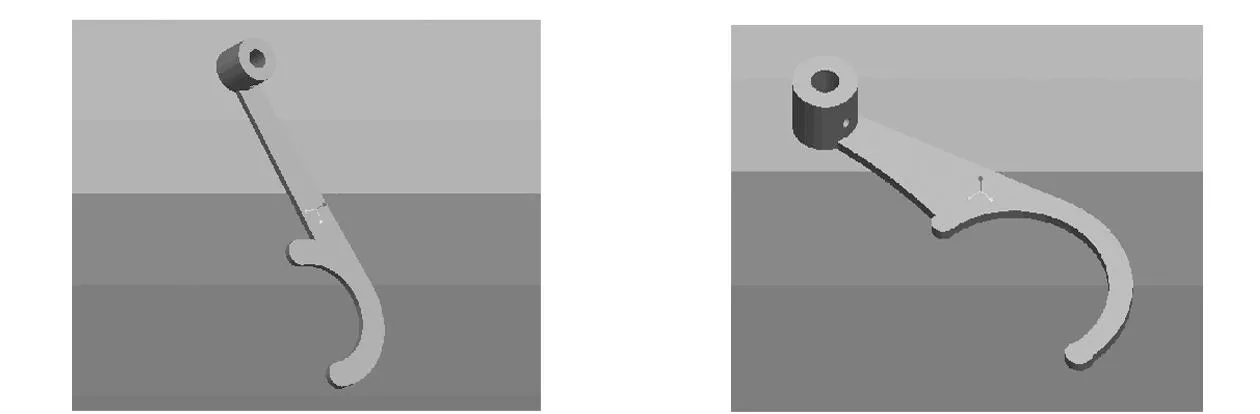
图7 1档、倒档拨叉 图8 2、3、4、5档拨叉
图9 2、3档拨叉轴 图10 1、倒档拨叉轴

图11 2、3、4、5档拨块 图12 倒档锁拨块

图13 倒档锁弹簧 图14 倒档锁销

图15 倒档锁销锁片 图16 选档软轴

图17 换档软轴
4优化分析
变速器柔性操纵机构建模完成后,进入Pro/E中运动仿真模块,根据已知参数定义驱动器和仿真运动参数[7],建立工作装置运动模型,检测操纵机构的运动干涉工作情况,在Mechanism中定义各挡位的参数,这样能够直接观察到操纵机构的运动情况,检查运动件之间的干涉情况,利用Pro/E行为建模里的灵敏度分析可对得到各个尺寸进行优化结果分析、计算,进行优化设计,当系统在提示“此部件优化成功”后,点击“确定”,最终可以确定出变速器柔性操纵机构的最终尺寸。
5结语
基于Pro/E的变速器远距离柔性操纵机构设计,通过Pro/E建模并进行优化分析,能快速得到优化后的变速器操纵机构模型,设计出符合要求的变速器操纵机构,此法简便、快速,设计的模型形象直观,结果提取方便,且能直接转换成工程图,采用Top-down方法设计的模型符合现代装载机设计的发展趋势。
参考文献:
[1]王望予.机械设计[M].第4版.北京:机械工业出版社,2011(1):108-109.
[2]梁文芝,高畅.格尔发重卡变速操纵机构设计[J].合肥工业大学学报(自然科学版),2007(12):60-63.
[3]孙卫平.变速器软轴操纵机构的设计[J].技术,2002(6):8-10.
[4]罗永革,冯樱.操纵杆设计[M].北京:机械工业出版社,2011.
[5]王霄锋.底盘设计[M].北京:清华大学出版社,2010.
[6]丁玉兰.人机工程学[M].北京:北京理工大学出版社,2011.
[7]李俊硕,于尊厂,张安鹏.Pro/ENGINEER 4.0基础培训标准教程[M].北京:北京航空航天大学出版社,2010.
