基于模糊自适应PID的水电站LCU功率调节研究*
2015-11-23张少东
张少东,谢 爽,张 莹
(1.国投甘肃小三峡发电有限公司集控运行中心,甘肃兰州 730050;2.兰州理工大学技术工程学院,甘肃兰州 730050)
0 引言
水能资源是可再生的、洁净的能源,截至2010年,我国水电装机容量达到1.85亿千瓦计算,水电开发的利用率只有34%左右,远远低于发达国家60%~70%的数值,所以水电开发潜力巨大,前景广阔。在我国,中小水电站的数量居世界之首。虽然我国中小水电设备制造水平已能基本满足实际需要,但是在低水头(≤50 m)、大流量的小水电设备制造、长期运行技术以及机组自动控制技术等方面与国外先进水平相比还有相当大的差距。因此,研究适用于低水头、大流量的小型水电站水轮发电机组现地监控系统,实现水轮发电机组长周期安全、稳定、经济运行就具有十分重要的意义[1]。
近年来随着计算机技术和自动化技术的发展,水电站监控系统已发展成一个集计算机、控制、通信、网络、电力电子为一体的分层(主控层和现地控制层)、开放式、综合自动化系统,其具有数据采集处理、信息输出、记录、报表、安全运行、经济运行指导、功率控制等功能[2]。水轮发电机组功率控制的具体过程是由操作员工作站给定负荷调整指令,指令通过通讯网络(现场总线)传递给现地监控系统(LCU),LCU下令可编程逻辑控制器(PLC)启动功率控制流程,PLC控制机组的导叶调速系统和励磁调节系统来调节机组的有功、无功功率[3-4]。笔者提出基于模糊自适应PID算法的水轮发电机组功率调节模式,可根据功率偏差e和功率偏差变化率Δe进行PID参数的在线自整定,从而使机组快速、准确、稳定地达到给定的功率值,并且此调节模式具有良好的鲁棒性、有利于延长机组寿命[5]。
1 常规PID控制算法
常规PID控制算法框图如图1所示。
PID是一种线性控制,它将给定值r(t)与实际输出值y(t)的偏差e(t)的比例(P)、积分(I)、微分(D)通过线性组合构成控制量,对控制对象进行控制;比例环节主要是即时成比例地反应控制系统的偏差信号e(t),偏差一旦产生,调节器立即产生控制作用以减小偏差。积分环节主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数TI,TI越大,积分作用越弱,反之则越强。微分环节能反应偏差信号的变化趋势(功率偏差变化率Δe),并能在偏差信号值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的响应速度,减小调节时间[6]。
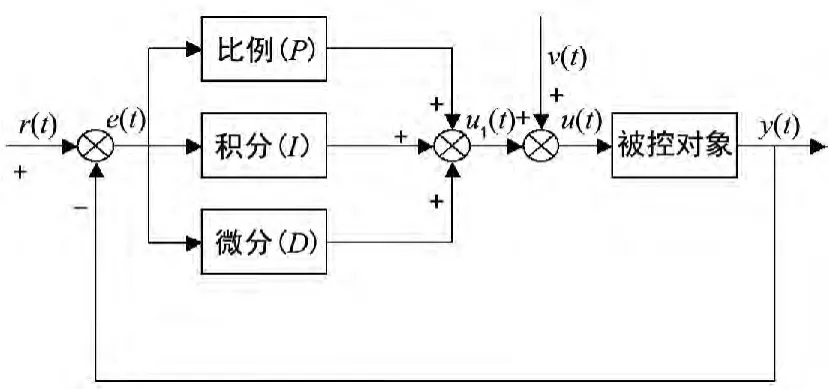
图1 常规PID算法框图
1.1 常规模拟PID控制算法
常规模拟PID控制表达式为:

式中:e(t)=r(t)-y(t);u1(t)是调节器的输出信号;e(t)是调节器的偏差信号;y(t)是系统的输出信号;r(t)是系统的输入信号;KP是比例系数;TI是调节器的积分时间系数;TD是微分时间系数[7-8]。
1.2 增量型数字PID算法
由离散化常规模拟PID公式可得数字PID公式,如式(2):u(k)=

在数字PID的基础上可得增量型数字PID为式(3):

式中:Δe(k)=e(k)-e(k-1)[10]
2 模糊自适应PID控制算法
2.1 模糊控制算法
模糊控制(FC-Fuzzy Controller),是以模糊数学、模糊语言形式的知识表示和模糊逻辑推理为理论基础,采用计算机控制技术构成的一种具有闭环结构的数字控制。模糊控制系统是一种典型的智能控制系统,是在控制原理上应用模糊集合论、模糊语言变量和模糊逻辑推理的知识,模拟人的模糊思维方法,对复杂过程进行控制,模糊控制系统的核心是模糊逻辑控制器。模糊控制有定义变量、模糊化、知识库、逻辑判断及去模糊化五个主要部分[11]。模糊控制系统的原理框图如图2所示。

图2 模糊控制系统原理框图
其中:e=r(t)-y(t),Δe=ek-ek-1。
模糊化的主要作用是将系统的精确输入量转换成一个模糊矢量。知识库由数据库和规则库两部分组成。数据库所存放的是所有输入、输出变量的全部模糊子集的隶属度矢量值(即经过论域等级的离散化以后对应值的集合),若论域为连续域,则为隶属度函数。在规则推理的模糊关系方程求解过程中,向推理机提供数据。模糊控制器的规则是基于专家知识或手动操作熟练人员长期积累的经验,它是按人的直觉推理的一种语言表示形式。逻辑判断模仿人类下判断时的模糊概念,运用模糊逻辑和模糊推论法进行推论,而得到模糊控制讯号。此部分是模糊控制器的精髓所在。去模糊化将推论所得到的模糊值转换为明确的控制信号,做为过程的输入值[12]。
2.2 模糊自适应PID算法
模糊自适应PID是将模糊控制策略和传统PID相结合的结果,其控制策略既有模糊控制适应性和灵活性强的特点,又有PID控制精度高的优势。
模糊自适应PID控制算法的具体过程是:根据PID控制器的三个参数(KP,KI,KD)与偏差e偏差变化率Δe之间的模糊关系,在运行时在线检测e及Δe,利用模糊推理的方法,在线修改PID控制器的三个参数,让PID参数可自整定,从而显著改善系统的控制特性,使控制系统满足“稳定、准确、快速”的控制要求,图3为模糊自适应PIC控制结构图。

图3 模糊自适应PID控制结构图
2.2.1 模糊自适应PID参数整定原则
(1)当|e|较大时,考虑到系统较好的跟踪性能,应取较大的KP、较小的KD,此时为避免系统响应出现较大的超调,须限制积分作用,此时KI=0。
(2)当e×Δe>0时,此时误差朝着绝对值增大的方向变化。若误差较大,可考虑由控制器实施较强的控制作用,此时取较大的KP、较小的KI、KD取值不能太大;若误差绝对值较小,控制器实施一般的控制作用,只要扭转误差的变化趋势,使误差朝绝对值减小的方向变化。
(3)当e×Δe<0或者e=0时,说明误差朝绝对值减小的方向变化,或者已达到平衡的状态,此时,不调整控制器参数,保持控制器输出不变。
(4)当e×Δe=0,e≠0时,表明系统的曲线与理论曲线平行或一致。为使系统具有良好的稳态性能,应采取较大的KP和KI值,同时避免设定值附近振荡,并考虑系统的抗干性能,适当选取KD值[13]。
2.2.2 确定 KP,KI,KD取值范围,进行 KP,KI,KD归一化处理
参数KP的取值范围为 {KPmin,KPmax},KI的取值范围为 {KImin,KImax},KD的取值范围为 {KDmin,KDmax},其中 KPmin、KPmax,KImin、KImax,KDmin、KDmax为通过实验测得的 KP,KI,KD的最小、最大值[14]。
可得参数KP,KI,KD的归一化公式如式(6):

2.2.3 进行变量的语言表达,选择隶属度函数
令输入的语言变量为偏差e和偏差变化率Δe,其语言表达、模糊隶属函数选择及论域分别为:正大PB,升半梯形分布的模糊隶属函数,论域[2,4];正小PS,三角形分布的模糊隶属函数,论域[0,2,4];零ZE,三角形分布的模糊隶属函数,论域[-2,0,2];负小NS,三角形分布的模糊隶属函数,论域[-4,-2];负大NB,降半梯形分布的模糊隶属函数,论域[-4,-2]。如图4所示。
参数 KP,KI,KD进行归一化处理为 ΔK1P,ΔK1I,ΔK1D后的语言表达、模糊隶属函数选择及论域分别为:大B,升半梯形分布的模糊隶属函数,论域[0.5,1];中 M,三角形分布的模糊隶属函数,论域[0,0.5,1],小S,降半梯形分布的模糊隶属函数,论域[0,0.5]。如图5所示。

图4 e和Δe的模糊隶属函数

图5 ΔK1P,ΔK1I,ΔK1D的模糊隶属函数

表1 ΔK1p模糊推理表

表2 ΔK1I模糊推理表

表3 ΔK1D模糊推理表
已知e,Δe输入,按模糊隶属函数对其进行模糊化处理,利用模糊规则及模糊关系运算分别求出K1P,K1I,K1D的隶属函数值,进行反模糊化运算和K1P,K1I,K1D的计算公式,求出参数K1P,K1I,K1D值。通过模糊推理在线自整定的参数K1P,K1I,K1D应用于 PID 调节,便能根据e和Δe的值得出具有良好抗旨特性的控制输出[15]。
3 基于模糊自适应PID算法的LCU功率调节模式
3.1 水电站功率调节过程
水电站计算机监控系统的功率调节过程一般分为3个步骤:
(1)主控层操作员工作站根据电网需要给定发电机组功率调节值(人工或者自动),并且通过通讯网络(一般采用现场总线)把功率调节指令和调节值传递给机组 LCU[16]。
(2)机组LCU中的PLC接到功率调节指令后进行给定功率值和测量功率值的对比,若两者的功率差值超过某一误差范围则启动相应的功率调节控制流程。否则,放弃本次功率调节。
(3)机组LCU中PLC输出增减有功功率脉宽控制电液调速器的接力器行程,完成有功功率调节;PLC输出增减无功功率脉宽,控制增减励磁,完成无功功率调节。采用PLC进行机组功率调节的根本任务是设定相关开出量的脉冲宽度和脉冲间隔参数值[17-18](参数定值需要大量实验测试值支持)。
3.2 基于模糊自适应PID算法的有功功率调节
基于模糊自适应PID的有功功率调节控制框图如图6所示。

图6 基于模糊自适应PID的有功功率调节控制框图
基于模糊自适应PID算法的水电站计算机监控系统有功功率调节过程一般分为4个步骤:①通过实验确定100%额定有功功率的偏差下的最大K,KI,KD参数值 KPmax,KImax,KDmax和50%额定有功功率偏差下的最小 KP,KI,KD,参数值 KPmin,KImin,KDmin;②进行KP,KI,KD参数的归一化处理,进行有功功率偏差和功率变化率、会议话参数的模糊语言表达,确定各参数模糊隶属函数;③有功功率偏差和功率变化率与归一化参数的模糊推理规则、模糊运算和反模糊化公式;④在不同有功功率偏差和功率变化率情况下,通过模糊推理求出自整定的 KP,KI,KD参数值,常规PID再根据功率偏差、功率变化率以及自整定KP,KI,KD参数值计算增量计算的控制输出值Δy(k)[19]。
Δy(k)是模糊自适应PID控制系统的输出值,其决定了PLC输出何种控制指令。
Δy(k)>0,PLC输出增有功指令。设定总脉冲宽度为ta(ms),Δy(k)的限定值为ya,则不同Δy(k)值下开关量输出的脉冲宽度为td=ta×Δy(k)/ya,当Δy(k)>ya时,td=ta。
Δy(k)<0,PLC输出减有功指令。设定总脉冲宽度为ts(ms),Δy(k)的限定值为ys,则不同Δy(k)值之开关量输出的脉冲宽度为tj=ts×Δy(k)/ys,当Δy(k)>ys时,tj=ts。
水电站计算机监控系统的模糊自适应PID无功功率调节与模糊自适应PID有功功率调节类似。
Δz(k)是模糊自适应PID控制系统的输出值,其决定了PLC输出何种控制指令。
Δz(k)>0,系统输出增无功指令。设定总脉冲宽度为taw(ms),Δz(k)的限定值为zaw,则不同Δz(k)值下开关量输出的脉冲宽度为tdw=taw×Δz(k)/zaw,当 Δu(k)>zaw时,tdw=taw。
Δz(k)<0,系统输出减无功指令。设定总脉冲宽度为tsw(ms),Δz(k)的限定值为zsw,则不同Δz(k)值之开关量输出的脉冲宽度为tjw=tsw×Δz(k)/zsw,当Δz(k)>zsw时
3.3 应用实例
黄河大峡水电站是黄河小三峡梯级、流域、滚动、综合开发建设的第一座水电站。混凝土重力坝挡水前沿总长257.88 m,最大坝高72 m,正常蓄水位1 480 m,总库容0.9亿m3。电站安装4台7.5万 kW的轴流转桨式水轮发电机组,于1996年12月~1998年6月先后投产,多年平均发电量14.65亿kW·h,是一座以发电为主,兼顾灌溉等综合效益的大II型水电工程。电站以220 kV一级电压接入甘肃电网。大峡水电站计算机监控系统由南瑞提供,设置了4台现地控制单元LCU,负责采集4台机组相关数据;公用和开关站也各设置了1台现地控制单元LCU,用于采集公用设备和开关站设备的数据;设置了2台远动通讯服务器用于调度通讯;设置了2台厂内通讯服务器用于和厂内其他系统通讯。大峡电站1号发电机组,为轴流转桨式水轮发电机组,容量75 MW,原LCU中功率调节模块利用PLC编程软件自带的常规PID模块进行机组的功率自动调节,有功功率从空载到额定负荷,其相关测试数据如下:调节时间:7'55″;超调量:±12%;调节精度:±5%。
根据上述理论,在PID中加入模糊推理模块,同时进行参数优化,有功功率从空载到满负荷,其相关测试数据如下:调节时间:<3 min;超调量:2.13%;调节精度:±2%;调节周期3;脉冲宽度12 ms。
同时有功功率从空载到50%额定负荷、满负荷到50%额定负荷、50%额定负荷到空载、满负荷到空载等的调节时间、调节精度、超调量等均取得了较大的改善。模糊自适应PID控制应用于无功功率调节也得到了令人满意的结果。
4 结论
采用模糊自适应PID控制的最大特点在于不需要建立精确地控制对象的数学模型,并能够根据给定值和测量之间的偏差和偏差变化率进行PID参数的在线自整定。利用模糊自适应PID的控制特点进行水轮发电机组的功率调节,通过PID参数的在线自整定,能够使机组快速、准确、稳定地达到给定的功率值,并且使LCU的功率调节具有良好的控制性和鲁棒性,有利用延长机组的使用寿命。
[1] 徐晨光,刘晓黎.水电站经济运行理论及算法实现[M].郑州:黄河水利出版社,2006.
[2] 陈晓东.中小型水电厂自动发电控制技术的研究[D].重庆:重庆大学,2008.
[3] 廖 亮.水轮发电机组监控系统研究[D].重庆:重庆大学,2005.
[4] 罗志元,刘时贵.水轮发电机组可编程控制装置及微机监控系统的研制[J].东方电机,1997(1):59-60.
[5] 李曼娜.基于PLC的水电站闸门监控系统的研究[D].武汉:武汉理工大学,2012.
[6] 胡寿松.自动控制原理[M].第四版.北京:科学出版社,2001.
[7] 李友善.自动控制原理[M].北京:国防工业出版社,2005.
[8] 吴 麒,王诗宓.自动控制原理[M].第二版.北京:清华大学出版社,2006.
[9] GeneF.Franklin(美),李中华,张雨浓,等.自动控制原理与设计[M].北京:人民邮电出版社,2007.
[10] 刘宝坤.计算机过程控制[M].北京.机械工业出版社,2001.
[11] 冯冬青.模糊智能控制[M].北京:化学工业出版社,1998.
[12] 韩俊峰.模糊控制技术[M].重庆:重庆大学出版社,2003.
[13] 尹 亮.模糊自适应PID控制算法分析[J].变频器世界,2011(9):86-88.
[14] 伍 奎.水电站计算机监控系统的模糊PID功率调节[J].重庆大学学报,2004,27(5):19-20.
[15] 蒋 伟.模糊自适应PID控制算法在电液伺服系统中的应用[D].南京:南京理工大学,2004.
[16] 孔大明.丰满水电厂经济运行研究[D].北京:华北电力大学,2008.
[17] 邓诗军.大型水电厂计算机监控系统发展方向初探[M].北京:中国电力出版社,2006.
[18] 何旭东.小型水电站技改监控系统的设计与实现[D].成都:电子科技大学,2011.
[19] 唐 列.基于模糊自适应PID控制策略的PCC水轮机调速器[D].南京:河海大学,2005.
[20] 刘胜芬.金龙水电站现地控制单元LCU的设计[D].河北:河北工程大学,2013.
[21] 李生民.小型水电站综合自动化系统设计研究[D].西安:西安理工大学,2009.
