多约束制导律与导引头隔离度制导匹配性研究
2015-11-18张文渊夏群利刘大卫
张文渊,夏群利,刘大卫
(1.北京理工大学宇航学院,北京100081;2.中国兵器科学研究院,北京100089)
多约束制导律与导引头隔离度制导匹配性研究
张文渊1,夏群利1,刘大卫2
(1.北京理工大学宇航学院,北京100081;2.中国兵器科学研究院,北京100089)
针对导引头隔离度影响多约束制导系统稳定性与制导精度的问题,推导了一种多约束制导律(GLMC),在此基础上构建了考虑导引头隔离度的多约束制导模型。研究了导引头隔离度和制导参数等对制导系统稳定性的影响规律,采用伴随函数法,分析了有无导引头隔离度影响情况下GLMC制导性能变化规律。结果表明,减小制导时间常数、增大隔离度幅值,以及剩余飞行时间的减小都会降低系统稳定性。GLMC能容忍的隔离度水平大约为1%,在实际工程应用中,要保证GLMC较为先进的制导性能,需严格控制导引头的隔离度水平,降低寄生回路对制导系统稳定性的影响。
兵器科学与技术;多约束制导律;制导稳定性;寄生回路;导引头隔离度
0 引言
随着制导武器战术技术性能指标要求的日益提高,导弹不仅要满足命中点位置约束,还需满足终端落角、终端过载等终端多约束条件,传统的落角制导律[1](GLIA)已不能满足多约束制导要求,因此国内外学者针对终端多约束制导问题,提出了多种终端多约束制导律(GLMC)[2-7]。
目前对GLMC的研究,多是基于各种制导律推导方法,从数学推导角度研究制导律特性。在实际工程问题中,GLMC制导性能的优劣与导引头性能密切相关,而隔离度是导引头的重要性能指标,表征导引头输出信息中隔离弹体扰动的水平[8]。隔离度会引起制导寄生回路,该寄生回路会严重影响制导稳定性,降低制导精度[9]。目前学者主要研究隔离度寄生回路在比例导引制导系统中对制导稳定性和制导精度的影响[10],鲜有学者对GLMC与导引头隔离度的制导匹配性问题进行深入分析和探讨,而这对于GLMC工程应用具有重要的指导意义。
针对上述问题,本文首先基于Zarchan的GLIA[1]推导得到一种GLMC,然后建立了考虑导引头隔离度寄生回路影响的多约束制导系统模型,分析了不同剩余时间情况下导引头隔离度和制导参数对制导系统稳定性的影响规律,利用伴随函数法,讨论了有无导引头隔离度影响的两种情况下,GLMC制导性能的变化规律,所得结论有助于GLMC的工程应用。
1 GLMC建模与推导
假设弹体动力学为典型1阶环节,以GLIA为基础,在线性系统范围内,不考虑目标机动,建立系统动力学等效模型,如图1所示。

图1 包含弹体动力学的制导系统模型Fig.1 Guidance system model with missile dynamics
图1中:at为目标运动加速度;ac为导弹法向加速度指令,即控制指令u;aL为经过弹体动力学后的实际加速度;分别为导弹法向位置、法向速度和法向加速度;Tg为弹体动力学时间常数。
取导弹的法向位置、法向速度和法向加速度3项作为系统状态:

则制导系统状态方程可表示为
为了研究具有终端多约束的最优制导问题,可建立以下目标函数:

式中:SF和R为半正定矩阵,分别为终端加权矩阵和控制加权矩阵;tF为导弹总制导时间;xF为终端特定约束;u为控制量。
终端加权矩阵SF和控制加权矩阵R可分别取为

对这类最优控制问题,采用状态反馈方法可获得该问题的最优控制解为

式中:终端状态的解为

根据系统状态矩阵获得其状态转移矩阵:
由(1)式可得

根据(4)式可得到最优控制量为
对于多约束末制导问题,不仅需保证命中点的位置和角度,同时还需要将命中点的加速度约束到期望值(一般取零值),则令罚函数s1→∞、s2→∞、s3→∞即可,在线性化小角假设下,可得到考虑弹体动力学滞后的具有终端位置、角度和加速度约束的GLMC:

该最优制导律的3项权系数Np(t)、Nq(t)和Na(t)随剩余飞行时间时变,确保位置、角度和加速度按照最优关系变化。相比于GLIA仅可保证终端位置和落角约束,GLMC在此基础上还可对终端加速度响应进行约束,并可通过令终端加速度响应为0来间接控制终端攻角量。
2 引入导引头隔离度影响
导弹在飞行过程中,弹体姿态扰动会部分耦合到导引头中,使其输出包含误差信息的目标视线角速度,从而产生导引头隔离度问题。
隔离度定义为
根据GLMC表达式(10)式,引入典型平台导引头隔离度,从而建立包含导引头隔离度的GLMC系统模型,如图2所示。
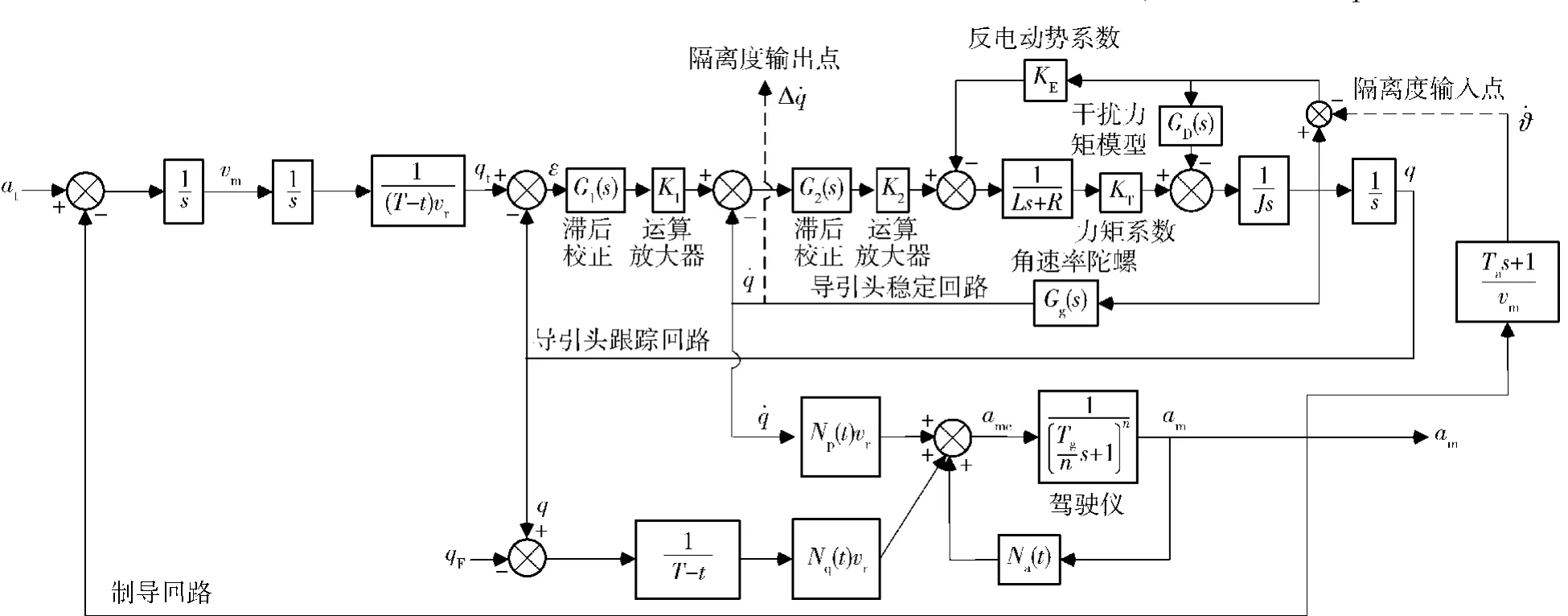
图2 引入导引头隔离度的GLMC多约束制导系统框图Fig.2 Block diagram of GLMC guidance system with disturbance rejection rate of seeker
图2中导引头回路包括导引头跟踪回路、导引头稳定回路、干扰力矩回路和反电动势回路,其中G1(s)为导引头跟踪回路前向传递函数,K1为运算放大器,G2(s)为稳定回路前向传递函数,K2为运算放大器,GD(s)为干扰力矩传递函数,Gg(s)为角速率陀螺传递函数,Tα为导弹攻角时间常数,KE为反电势系数,KT为力矩系数,J为平台转动惯量。图2中虚线所示为导引头隔离度的输入和输出点。
利用(11)式隔离度定义,根据图2可推导得导引头隔离度传递函数GPL(s)如(12)式所示。

3 GLMC制导系统稳定性分析
导引头隔离度的主要问题在于会使导弹制导系统中形成一个额外的隔离度寄生回路,即由于隔离度的存在使导引头输出附加的弹目视线角速度,控制系统使用错误的信号进行制导控制,造成附加的弹体扰动,该弹体扰动又会使导引头输出错误的弹目视线角速度,这样就形成隔离度寄生回路。该寄生回路会造成制导系统存在严重的稳定性问题。
由图2可知,当弹目距离较远时,剩余飞行时间tgo即T-t较大,制导回路带宽较窄,制导系统的稳定性主要由隔离度寄生回路决定,在分析制导系统稳定性时,可先断开制导回路,单独分析隔离度寄生回路的特性。GLMC制导系统单独寄生回路框图如图3所示。其中为由几何关系得到的视线角速度,为导引头量测视线角速度。
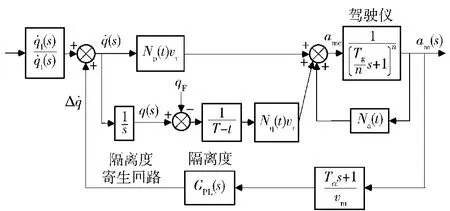
图3 基于GLMC制导律的单独寄生回路框图Fig.3 Parasitic loop based on GLMC
为了对图3所示系统稳定性进行分析,可认为qF为一干扰输入,其取值不会影响整个系统稳定性,因此可令qF为零值,得到隔离度寄生回路闭环传递函数G(s)表达式如(13)式。

从(13)式可以看出,隔离度寄生回路闭环传递函数G(s)为一时变系统,这里将该系统按照时不变系统进行近似,利用时不变控制理论分析不同tgo情况下制导系统的稳定性。
控制系统的稳定性由系统闭环极点唯一确定,闭环特征方程式的根就是闭环传递函数的极点,即闭环极点。为了分析方便,假设隔离度传递函数为一放大环节,即GPL(s)=R,R代表隔离度幅值的大小,R>0代表隔离度传递函数为正反馈,R<0则为负反馈。
取驾驶仪为近似4阶系统,即n=4,则


(15)式为方程组解集,它给出了制导系统稳定时的参数解分布,即稳定域,利用该稳定域可评估制导系统在不同参数情况时的稳定性。
针对静止目标和移动目标,取典型制导参数,如表1所示,得到不同tgo情况下导引头隔离度和制导参数对GLMC系统稳定性的影响。

表1 典型制导参数Tab.1 Typical guidance parameters
由图4可知,对于包含隔离度寄生回路的GLMC系统,导弹攻击移动目标时系统稳定域小于攻击静止目标时;增大攻角时间常数Tα、减小制导时间常数Tg、增大隔离度幅值R,都会减小系统稳定域,且随着剩余飞行时间tgo的减小,系统稳定域也逐渐减小。
因此,当采用GLMC攻击大机动目标(vr/vm增大)或导弹在高空飞行时(攻角时间常数Tα增大),寄生回路稳定性问题会进一步严重,此时寄生回路稳定域较小,对导引头隔离度水平要求较为严格,若要保证制导系统稳定,可通过设计来增大制导动力学时间常数Tg,从而提高系统稳定性。

图4 不同tgo下的稳定域随隔离度幅值变化曲线Fig.4 Change of stable domain with seeker disturbance rejection rate at different tgo
4 GLMC性能分析
4.1 不存在导引头隔离度影响时
GLMC是包含终端位置、角度和加速度约束的最优制导律,其制导偏差应包含位置脱靶量Zmiss、角度脱靶量Qmiss和加速度偏差Amiss三部分,系统框图如图5所示。

图5 GLMC系统框图Fig.5 Block diagram of GLMC guidance system
采用表2典型制导参数,引入传统GLIA,利用伴随函数法[1]可将图5转换成无量纲伴随系统来对比分析两种制导律脱靶量变化情况。

表2 典型制导参数Tab.2 Typical guidance parameters
图6给出了由初始速度指向误差引起的制导脱靶量变化曲线,由仿真结果可看出,相比于GLIA,GLMC位置脱靶量和角度脱靶量始终为0,同时GLMC在很小的相对末制导时间内可将终端加速度收敛到0,证明了该制导律制导性能的优异性。
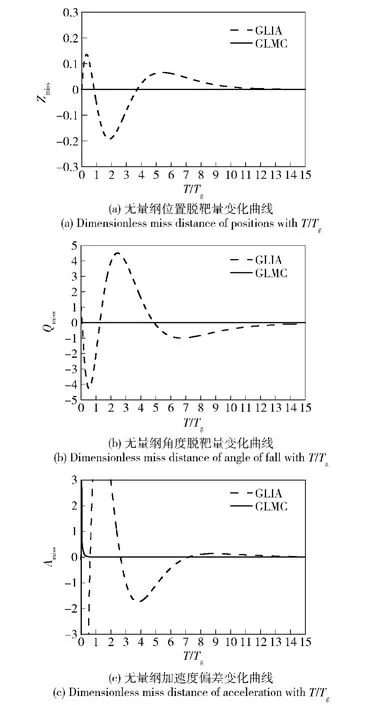
图6 制导脱靶量随相对末导时间变化曲线Fig.6 Change of guidance miss distance with T/Tg
图7 GLMC脱靶量伴随系统Fig.7 GLMC adjoint system of miss distance
4.2 存在导引头隔离度影响时
当存在导引头隔离度时,可通过分析导引头隔离度对制导脱靶量的影响,得到隔离度寄生回路对制导律制导性能的影响关系。引入典型制导误差,取某雷达导引头的典型参数,对图2进行伴随变换后得GLMC脱靶量伴随系统,如图7所示,其中missε、missr为导弹初始速度指向误差和目标随机机动输入引起的脱靶量。
图8和图9给出了存在导引头隔离度影响时,由典型制导误差引起的GLMC与GLIA无量纲位置脱靶量与角度脱靶量随导引头隔离度幅值的变化曲线。由仿真结果可知,当隔离度幅值较小时,制导脱靶量无明显变化,当隔离度幅值大于某一值时,制导脱靶量迅速发散。
取表2主要干扰参数值,进一步可定量计算得到GLMC在不同隔离度幅值情况下,各干扰引起的具体制导脱靶量数值,如表3所示。
在本文的仿真参数下,传统GLIA能容忍的导引头隔离度水平大约为4%,GLMC能容忍的隔离度水平大约为1%,当隔离度幅值大于1.2%时,在隔离度作用下GLMC位置脱靶量大于5 m.虽然GLMC制导性能更加优秀,能够满足较多的终端约束条件,但该制导律对导引头隔离度的变化较为敏感。
5 结论
1)基于多约束最优制导律,构建了包含导引头隔离度的终端多约束最优制导律制导系统模型,多约束制导系统的稳定性受制导参数、导引头隔离度大小、剩余飞行时间等因素综合影响,并给出了系统稳定域随上述因素的变化规律。
2)利用伴随函数法分析了是否存在导引头隔离度影响情况下GLMC的制导性能,仿真结果表明,不存在隔离度影响时,GLMC具有优秀的多约束制导性能;当存在隔离度影响时,GLMC若要满足一定的制导精度要求,隔离度水平须小于1%.
3)本文从制导律的实际工程应用角度出发,证明虽然通过数学推导可以得到满足更多终端约束条件、制导效果更好的终端多约束最优制导律,但同时其制导鲁棒性也必然降低,在GLMC的工程使用当中,制导性能的优劣受导引头隔离度寄生回路影响较大,要满足较高的制导精度,必须将隔离度水平严格控制在制导律能够容忍的范围内。
图8 导弹初始速度指向误差vmε引起的脱靶量Fig.8 Miss distance caused by vmε

图9 目标随机机动ur引起的脱靶量Fig.9 Miss distance caused by ur
表3 干扰输入下GLMC制导脱靶量数值Tab.3 The values of miss distance of GLMC caused by different interferences
(
)
[1]Zarchan P.Tactical and strategic missile guidance[M].6th ed. Virginia:AIAA,2012:31-50,541-569.
[2]Ryoo C K,Cho H,Tahk M J.Optimal guidance laws with terminal impact angle constraint[J].Journal of Guidance,Control,and Dynamics,2005,28(4):724-732.
[3]Ryoo C K,Cho H,Tahk M J.Time-to-go weighted optimal guidance with impact angle constraints[J].IEEE Transactions on Control Systems Technology,2006,14(3):483-492.
[4]Ohlmeyer E J,Phillips C A.Generalized vector explicit guidance[J]. Journal of Guidance,Control,and Dynamics,2006,29(2):261-268.
[5]刘大卫,夏群利,左媞媞,等.包含弹体动力学的终端角约束弹道成型制导律[J].北京理工大学学报,2013,33(4):363-368. LIU Da-wei,XIA Qun-li,ZUO Ti-ti,et al.Trajectory shaping guidance law with terminal impact angle constraint including missile body dynamics[J].Transactions of Beijing Institute of Technology,2013,33(4):363-368.(in Chinese)
[6]蔡洪,胡正东,曹渊.具有终端角度约束的导引律综述[J].宇航学报,2010,31(2):315-323. CAI Hong,HU Zheng-dong,CAO Yuan.A survey of guidance law with terminal impact angle constraints[J].Journal of Astronautics,2010,31(2):315-323.(in Chinese)
[7]孙未蒙,刘湘洪,郑志强.多约束条件下的制导律研究综述[J].飞行力学,2010,28(2):1-5. SUN Wei-meng,LIU Xiang-hong,ZHENG Zhi-qiang.Survey on the development on the guidance law with impact angular constraints[J].Flight Dynamics,2010,28(2):1-5.(in Chinese)
[8]杜运理,夏群利,祁载康.导引头隔离度相位滞后对寄生回路稳定性影响研究[J].兵工学报,2011,32(1):28-32. DU Yun-li,XIA Qun-li,QI Zai-kang.Research on effect of seeker disturbance rejection rate with phase lag on stability of parasitical loop[J].Acta Armamentarii,2011,32(1):28-32.(in Chinese)
[9]徐平,王伟,林德福.导引头隔离度对末制导炮弹制导控制的影响[J].弹道学报,2012,24(1):17-22. XU Ping,WANG Wei,LIN De-fu.Effect of seeker isolation on guidance and control of terminal guided projectile[J].Journal of Ballistics,2012,24(1):17-22.(in Chinese)
[10]李富贵,夏群利,崔晓曦,等.导引头隔离度寄生回路对视线角速度提取的影响[J].宇航学报,2013,34(7):1-6. LI Fu-gui,XIA Qun-li,CUI Xiao-xi,et al.Effect of seeker disturbance rejection rate parasitic loop on line of sight rate extraction[J].Journal of Astronautics,2013,34(7):1-6.(in Chinese)
Research on Guidance Matching of Guidance Law with Multiple Constraints and Seeker Disturbance Rejection Rate
ZHANG Wen-yuan1,XIA Qun-li1,LIU Da-wei2
(1.School of Aerospace Engineering,Beijing Institute of Technology,Beijing 100081,China;2.Ordnance Science and Research Academy of China,Beijing 100089,China)
A guidance law with multiple constraints(GLMC)is derived in light of the effect of disturbance rejection rate of seeker on the stability and guidance accuracy of the multi-constraint guidance system,and a multi-constraint guidance model is established,in which the disturbance rejection rate of seeker is considered.The effect of disturbance rejection rate and guidance parameters on the stability of guidance system is analyzed.In addition,the adjoint function is employed to analyze the guidance performance variations of the multi-constraint guidance law with or without the influence of disturbance rejection rate of seeker.The results indicate that any decrease in guidance time constant or flight remaining time as well as increase in the disturbance rejection rate will lead to a decrease in the stability of guidance system.The GLMC can sustain a disturbance rejection rate of about 1%.In the practical applications,it is essential to control the level of disturbance rejection rate of seeker strictly and reduce the effect of parasitical loop on the stability of guidance system so that a superior guidance performance of the multi-constraint guidance law can be ensured.
ordnance science and technology;guidance law with multiple constraints;guidance stability;parasitic loop;disturbance rejection rate of seeker
V448.133
A
1000-1093(2015)08-1473-08
10.3969/j.issn.1000-1093.2015.08.014
2014-12-09
国家科技重大专项(2013年)
张文渊(1987—),男,博士研究生。E-mail:zhwy_bit@163.com;夏群利(1971—),副教授,博士生导师。E-mail:1010@bit.edu.cn