船用波浪补偿技术的研究
2015-11-18魏辽国江一帆
叶 勇,魏辽国,江一帆
(上海振华重工(集团)股份有限公司,上海 200125)
船用波浪补偿技术的研究
叶 勇,魏辽国,江一帆
(上海振华重工(集团)股份有限公司,上海 200125)
为了突破波浪补偿技术的研发瓶颈,振华重工攻克了主动波浪技术的难点,成功设计出带有主动波浪补偿技术的克令吊,该克令吊的研发成功,对我国掌握波浪补偿技术具有重大意义。
船用;波浪补偿;技术;研究
0 引言
海上船舶在两船并靠或者船至岸等情况进行作业时,时常会碰到复杂的波浪运动,造成船舶横摇、纵摇和升沉等复杂的相对运动,给装卸带来困难和危险。如何解决海上工程船舶吊装过程中的波浪运动问题,就要求船上配置的设备具有波浪补偿能力。
本文对船用补偿技术进行了介绍,着重研究了振华重工(集团)公司(下称:振华重工)设计的主动波浪补偿克令吊中所采用的关键,即液压二次控制系统和智能控制算法,为波浪补偿关键技术推广到国内装备领域提供了参考依据。
1 波浪补偿技术的分类及适用范围
波浪补偿技术根据使用的要求不同,可以进行不同的分类和定义。按照实现的目的,可以分为位移波浪补偿和速度波浪补偿技术、力波浪补偿技术[1]。
按照动力的来源,可以分为随动补偿和主动补偿技术。随动补偿技术又可以分为恒张力补偿和随动补偿技术。
恒张力补偿系统是力学系统中合力为零原理的具体应用,系统构成如图1所示。整个补偿装置中,由油缸执行对力和高度的补偿,并有控制器对位置、速度、压力、张力的信号进行反馈和控制,控制油缸进行相关的补偿动作,实现波浪补偿功能。
随动波浪补偿系统(Passive Heave Compensation System,PHCS)主要由起重绞车、随动绞车、补偿气缸、滑轮缠绕系统、随动补偿小车和电控系统等组成(见图2)。随动波浪补偿系统原理相对简单,但是要求接收船需要有钩挂点,以钩挂随动吊钩。随动吊钩所产生的载荷要求蓄能器有较大的容量,要求补偿油缸有较大的承受力。
主动波浪补偿系统(Active Heave CompensationSystem,AHCS)是用在对速度、力和位移精度要求相对较高的场合,需要采用特殊的二次马达控制技术和智能控制算法,本文将着重介绍该两项关键技术。
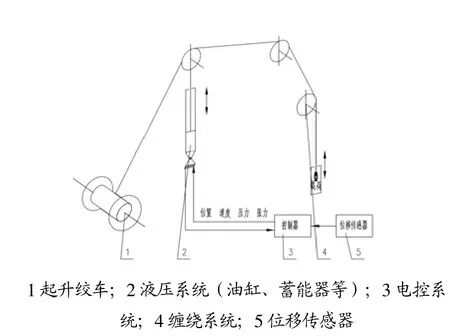
图1 恒张力补偿系统简图

图2 随动波浪补偿系统简图
2 振华重工的主动波浪补偿克令吊
主动波浪补偿克令吊由机械系统、检测系统、控制系统和液压马达驱动系统等组成(见图3)。
起升绞车、起重臂架、钢丝绳和滑轮缠绕系统等组成了机械系统。起升绞车安装在起重机上,起升卷筒通过钢丝绳连接负载,负载沉浸在水中。起重臂架折臂少,结构紧凑,减少了臂架的摇摆。检测系统由传感器及数据处理单元构成,实现船舶姿态运动、钢丝绳张力以及负载张力、位移、速度等信号的实时检测。控制系统由硬件硬件和软件系统构成,根据检测系统所检测到的信号和反馈量通过智能控制算法控制电液机构。液压驱动系统采用二次马达调速技术,二次调节技术能够快速有效的实现卷筒的正反转调速,并配置蓄能器,实现能量的回收和反馈功能。
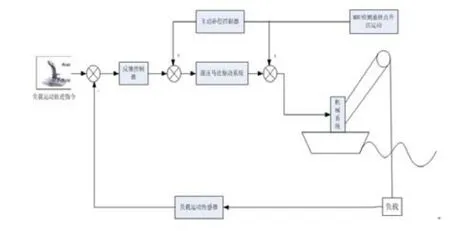
图3 ZPMC-30t波浪补偿克令吊系统图
2.1 主要参数
1)普通吊机模式
安全工作载荷:30t,半径10m;15t,半径15m;5t,半径5.5m。
最小工作半径:5.5m;
吊钩行程:600m;
起升速度:0-15t,0-120m/min;15-30t,0-60m/min;
回转范围:360°;
回转速度:0-0.4rpm。
2)主动补偿模式
AHC模式下最大载荷:30t;
AHC模式下最小载荷:0t;
波浪幅值:±2.5 m;
AHC模式下最大补偿线速度:1.96 m/s;
AHC模式下最大加速度:1.54 m/s2。
2.2 液压马达驱动系统
30t波浪补偿克令吊主起升绞车由五个液压二次马达驱动,其工作原理如图4所示,它由恒压变量泵、安全阀和蓄能器等组成恒压油源。二次液压马达与恒压网络相连,经减速器,带动绞车滚筒转动[2]。二次控制系统是通过液压马达排量调节而实现速度、转向控制,从而实现绞车的转速和转向的变化,实现补偿功能,这与传统的泵控或阀控系统完全不同,所以二次控制系统亦称为“压力耦合系统”。
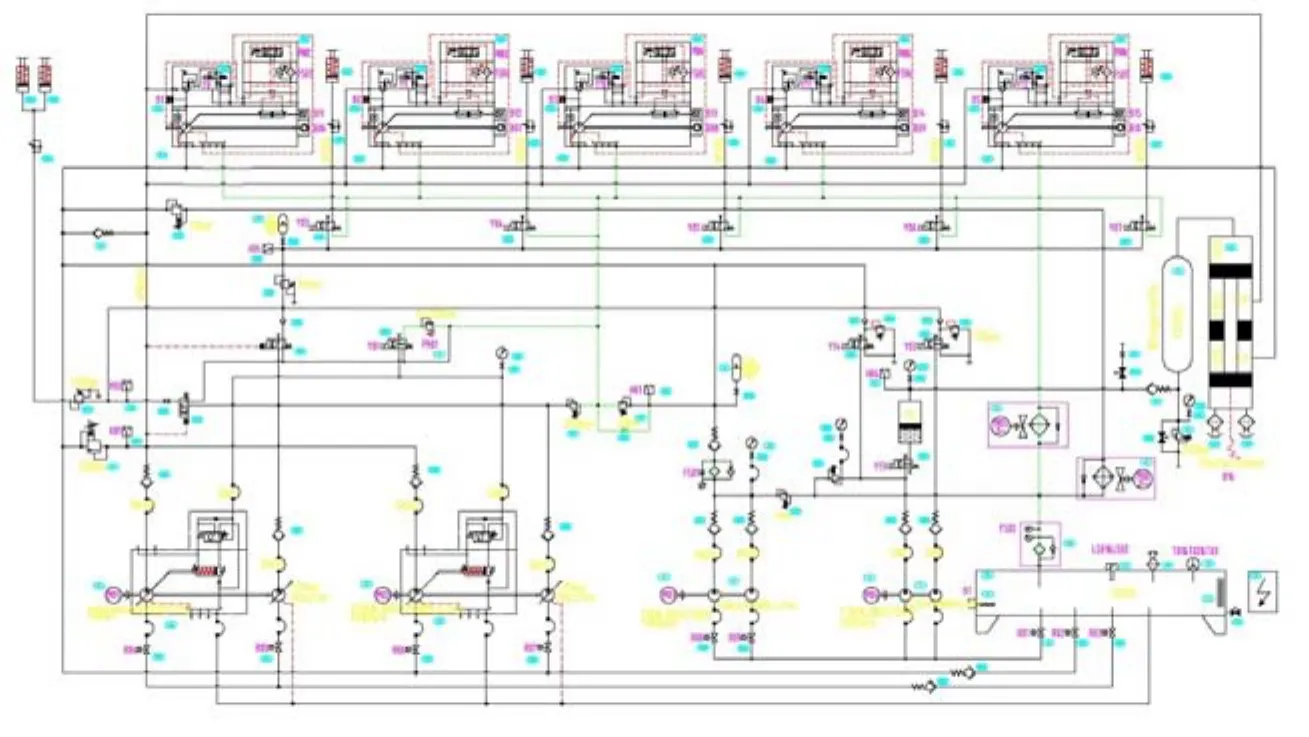
图4 主起升液压原理图
2.3 二次控制系统
二次控制系统是一个开式和闭式系统的结合体,它本身需要借一个近似恒压系统为配套一起使用。在二次控制马达和近似恒压系统之间不带任何调速阀组,它是通过指令传给二次马达,而使马达的排量发生变化,以达到液压马达的输出扭矩发生变化,从而使液压马达所驱动的机构速度发生变化以达到外界对此机构的速度要求。这就是所谓的“压力耦合系统”。从这点可看到泵和二次控制马达在工作时无任何节流情况出现,这可使系统的效率和反应速度大大提高。
能量回收对于应用在主动波浪补偿上是非常重要的,这主要靠二次控制马达与蓄能器组成。而二次控制马达本身是可以在正、负摆角下变化工作,同时伴随着蓄能器对能量的吸收和吐出。主动波浪补偿是一个周期性运动,主绞车工作时是不停的正反转而收缆和放缆的。理论上,主动波浪补偿运动是一个动量回收和释放的过程,能量可以百分之百回收,也可以百分之百释放。当船体下降时,利用其自身的重量向下运动(有保护装置),此时二次元件的排量逐渐减小,马达工作于“泵”工况。反馈回来的能量储存在蓄能器中,作为下次船舶上升启动的能量使用。
主动恒张力调节也是通二次控制马达来实现,正因为是压力耦合系统,在主动恒张力微调时便可以在很短的时间内作出反应,另外动力站的压力阀是电比例阀,所以系统压力量是可在不同的负载情况下进行无级调节。我们将工况分成几个等级,从而调节压力,再加二次控制,可以等同于一个可调的近似恒压系统。
2.3.1 二次控制系统原理
如图5所示,二次控制元件的排量由控制油缸进行控制,控制油缸的流量通过伺服阀控制。二次控制元件转速的变化,可由与二次控制元件转轴相连的增量式编码器测出并转送给控制器,控制器根据智能控制算法产生的控制信号经过转盘传感器、转盘控制器传给伺服器,从而控制控制油缸的移动,实现二次控制元件的排量变化,实现无级调速。
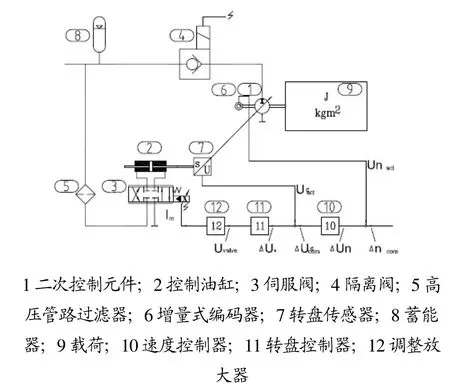
图5 二次马达控制原理图
2.4 主动波浪补偿控制算法原理
主动波浪补偿是一个非线性系统,而且惯量大,控制器、感应器、执行机构之间信号传输频繁,参数时变,同时执行机构最终接收控制器信号延后,往往产生时滞。主动波浪补偿要想达到一定的控制精度,就必须采用相关的智能控制算法,从而消除液压绞车大惯量、滞后、参数时变、钢丝绳弹性因素和水下负载的阻尼等非线性因素对主动升沉补偿控制性能的影响,提高机械系统和液压系统的补偿效率。
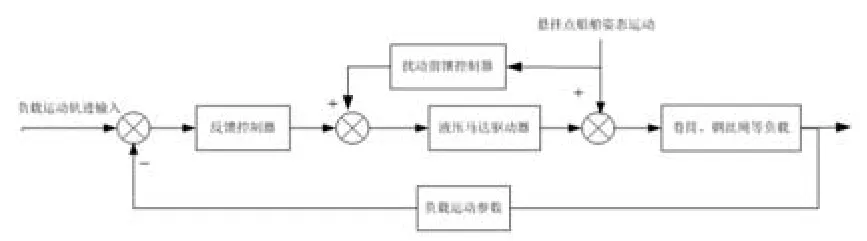
图6 控制算法图
可以将主动波浪补偿系统看作是一个采用智能控制算法的复合控制系统,该系统由位置反馈系统和扰动前馈补偿控制系统等组成,如图6所示,其所起的作用为位置控制、扰动前馈控制、恒张力控制与过载保护。位置控制主要是偏差控制,是给定的负载相对悬挂支点的垂直方向位移与负载实际运动位移的偏差控制过程。扰动前馈控制是为了抵消因海浪引起的船体升沉运动从而对负载运动位移的干扰作用。恒张力控制与过载保护是对速度的限制,以减小附加力矩,控制力。
本克令吊控制系统的最终目的是控制吊装负载的运动状况,而由于水下负载的运动状况很难准确测量,或者检测成本极高,因此也就不可能直接反馈水下负载的运动参数。为此,将吊载和钢丝绳、阻尼等因素对波浪补偿影响简化为如图7所示的负载运动模型。
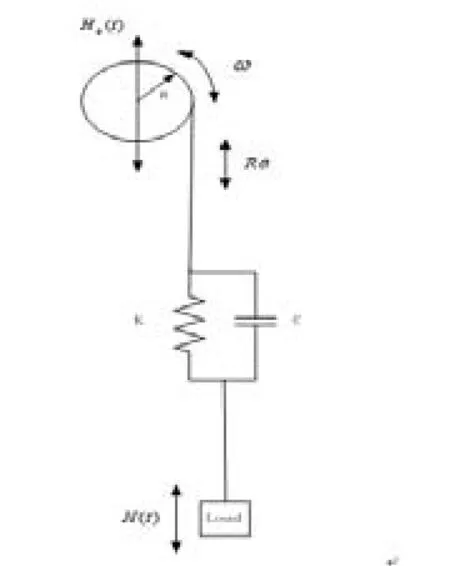
图7 负载运动模型
根据牛顿定律,可以建立如下微分方程:

式中,meq为等效负载质量;C为系统阻尼;K为钢丝绳弹性刚度系数;H(t)为水下负载运动位移;H0(t)为位移;R为卷筒半径;θ为卷筒转角;Fstatic为负载的静态张力。
有效质量meq为:

式中,mload为吊载重量,manchor吊钩重量,ma为其他附加重量,mrope为悬挂点下钢丝绳重量,lrope为钢丝绳长。
钢丝绳弹性刚度系数K:

式中,E为钢丝绳弹性模量;A为钢丝绳截面积,lrope为钢丝绳长;
负载阻尼系数C:

式中,ρwater为海水密度;Aload为负载有效面积;Cd为阻尼系数(一般取为0.5~0.6)。
钢丝绳与负载静态张力Fstatic:
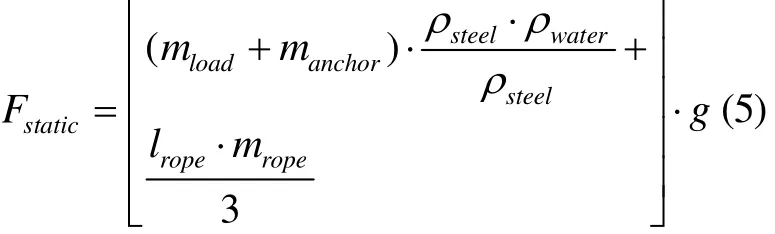
式中,ρsteel为钢铁密度;mrope为水下钢丝绳质量;g为重力加速度。
通过安装于绞车上的绝对值编码器,从而可以得到绞车收放钢丝绳的运动位移。张力检测传感器,得到钢丝绳张力。通过船舶运动姿态检测传感器MRU可以检测当前时刻的悬挂支点处的升沉位移。然后通过上述的动力学模型,即可以计算得到水下负载的运动参数,将此运动参数作为反馈参数,反馈到给定的负载运动路径信号,根据运动偏差设计智能控制算法,确保水下负载按照设定的路径运动。
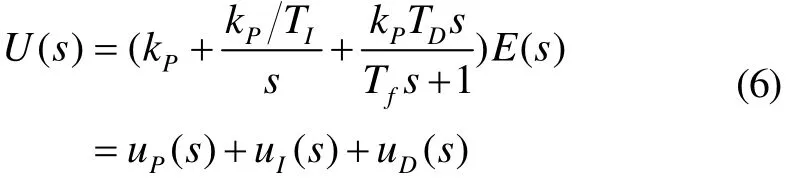
由于按照上述动力学模型计算所得到的运动参数有较大的扰动突变项,因此为了是反馈参数变得稍平缓,可以加入一个一阶惯性函数[3],在反馈控制算法中利用不完全微分法,其传递函数为:
离散化为:

现将uD(k)推导:

写成微分方程为:

取t为Ts,上式为:

经整理可得:
控制器读取MRU数据,进行扰动前馈控制,得到电压uforward,该电压为扰动前馈控制电压。读取卷筒绝对值编码器和张力传感器数据,进行动力学模型计算,通过与操作手柄的控制指令信号进行比较分析,利用位移偏差信号进行不完全微分法计算,得出反馈控制电压ufeedback,控制器通过数模转换器,输出总的控制电压u=uforward+ufeedback,该电压为马达驱动电压,从而驱动绞车马达,实现主动波浪补偿功能。
3 结束语
本文对相关波浪补偿技术进行了介绍。文中着重介绍了振华重工设计的主动波浪补偿克令吊所采用二次马达控制系统和智能控制算法等关键技术。该设备的研发设计成功,标志着长期处于滞后状态的主动波浪补偿技术向前推进了一大步,同时对波浪补偿技术的推广和应用有着重要的作用。
[1] 吴思宇. 基于模糊PDF海工克令吊波浪补偿系统的设计与实现[D]. 2013.
[2] 刘宇辉, 蒲红, 姜继海. 应用二次调节技术的液压绞车性能研究[J]. 佳木斯大学学报(自然科学版), 2000(3).
[3] 袁浪, 周少林, 刘伟伟. 不完全微分PID算法在线材活套控制中的分析与运用[J]. 电气自动化, 2014(2).
Research of Technology of Heave Compensation on Ship
Ye Yong, Wei Liao-Guo, Jiang Yi-Fan
(Shanghai Zhenhua Heavy Industry Co., Ltd., Shanghai 200125, China )
In order to break through the bottleneck of the heave compensation technology research and development, Zhenhua Heavy Industry overcomes the difficulties of active wave technology, and successfully designs a crane with an active wave compensation technology. The successful development of the crane is significant for the master of the heave compensation technology in China.
on ship; heave compensation; technology; research
U666.4+4
A
10.14141/j.31-1981.2015.03.002
叶勇(1979-),男,工程师,研究方向:海洋工程重型锚机及深水锚机研发。
