电力拖动技术中控制电路的设计与改进
2015-11-15方园
方 园
(广东省茂名市质量计量监督检测所,广东茂名,525000)
电力拖动的应用在生活领域以及生产领域都有着充分的发展和应用,它是指让电动机运转以致于拖动生产机械进行工作的一种应用方法。
电力拖动系统不是单一结构的系统,它是由四个子系统组合而成,子系统间的联系可以如下图1所示简单的表达出来:
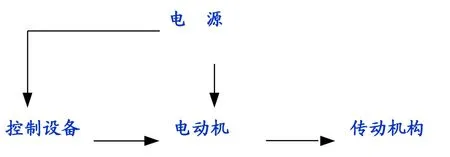
图1 电力拖动系统
电源,一般常见的有两种形式,直流与交流电源,它是为控制设备和电动机提供连续能源的装置。控制设备是由多种形式的控制电动机、电器、自动性质的元件和工业控制计算机这几个部分组成的,它的用途主要体现在控制上,控制着电动机的运转。电动机分为交流电动机和直流电动机两种,它是将电能应用在生产机械上,从而推动其运转近而转化为机械能的原动机。传动机构是传送电动机与工作机构之间的动力的一种机构。
1 常见的控制电路
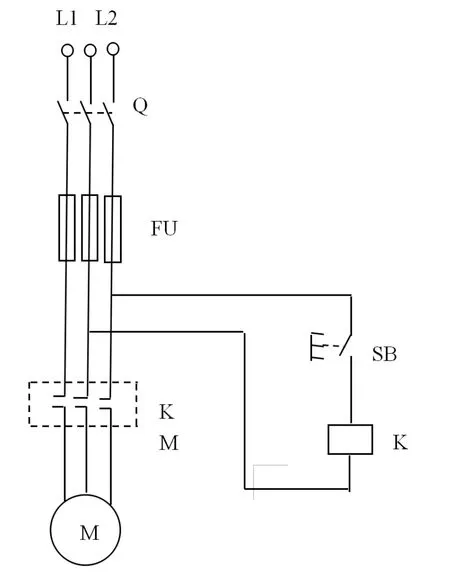
图2 点动控制电路
1.1 点动控制电路
电动,就是通过电能的作用来进行推动机械的运转,在按动启动按钮后进行通电即转动,松开按钮处在断电情况下则停止运转。
图2工作原理为:在L1、L2、L3电源均处在通电的情况下,按动SB启动按钮连接电源,此时的交流接触器KM线圈就会处在通电的状态,与此同时交流接触器KM的主触头就会闭合,电动机M就会得到电流从而进行运转;当SB按钮被操作人员松开时,就会导致 KM线圈失电,KM常开触点就会随之断开,电动机M也会随之断电并停止运转。
1.2 常规控制电路
目前,世界上的生产过程比较繁忙,许多机械都要周而复始的完成相应的机械运动,维持的时间较长的工作,采取点动式控制这种方式,它需要人在一边一直按住按钮不能松开,这样的工作不仅浪费人力而且造成许多实际操作的麻烦。
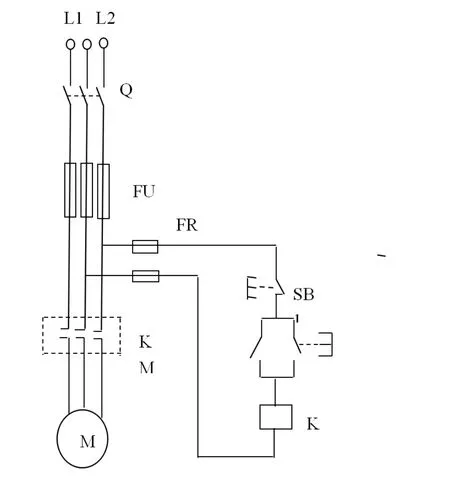
图3 常规控制电路
工作原理为:在L1、L2、L3电源均处在通电的情况下,按动SB2启动电钮,此时交流接触器KM线圈就会有电流通过,其主触点闭合,而其常开触头(自锁)则会自动的进行闭合,电动机M得电得意运转。当松开SB2启动电钮使其还原到原始状态时,而接触器KM线圈的动合辅助触头仍在闭合,M继续运转。这是因为KM的动合辅助触头是同时闭合的,它让KM的线圈由接通后的SB2启动电钮与动合辅助触头相并联,然后继续通电而继续工作。让接触器本身的动合辅助触头来吸引线圈从而使整个电路继续通电的状态的这种方式,被我们称为自锁现象,动合辅助触头则是自锁触头。
2 改进后的正反转控制电路
在当今的社会生产中,根据社会的需求,生产往往需要具备两个方向的运动部件。面临这样需求,用两个或两个以上的交流接触器控制电路来控制一台电动机去实现。
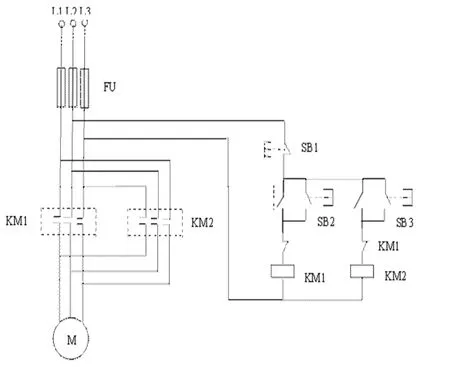
图4 常规控制电路
工作原理为:
(1)正向控制
在L1、L2、L3电源处在通电的情况下,按动正向SB2启动按钮,这是交流接触器KM1的线圈则会通过电流,与此同时,KM1的主触头也会闭合,这两者条件下,接触器的自锁触头会发生自动闭合,电动机M则得到电能得意运转,这个工作流程的顺序是按照L1、L2、L3的顺序进行的,这样就是正向运动。
(2)停止控制
操作人员摁下停止按钮SB1,这会导致KM1线圈出现断电的状态,而与此同时情况下,KM1的主触头和自锁触头也会断开,这时的电动机M由于断电而停止运转。
(3)反向控制
在L1、L2、L3电源处在通电的情况下,按动SB3反向按钮,这时交流接触器KM2线圈则会通过电流吸引合并辅助触电进行自锁,这时常开主触头就会连接闭合电动机M的连动电源相序,使得其相序改变为L3、L2、L1,我们称之为反向运动。
(4)互锁控制
互锁控制的主要作用是让其具有禁止的功能,也就是让线路的安全运行起到保护性的作用。将KM2的常闭辅助触点串联到交流接触器KM1线圈回路中,就交流接触KM1的常闭辅助触点串联流接触器KM2线圈回路中。换而言之就是当KM1线圈得电后,KM1的常闭触点断开, KM2线圈失电,KM2常开触点不会吸合,反之同理,这样的处理方式就有效的防止KM1、KM2常开触点同时吸合,不会造成短路情况,这一线路环节也被称之为交流接触器的互锁环节。
3 应用实例
3.1 Y-△起动控制电路原理
图5所示的是Y型接法转换到△型接法的起动控制电路常规控制电路,电路正常工作时,可忽略触点动作时间,那么控制电路的的动作顺序如下:
起动按钮SB2被按下,KM1、KM3、KT线圈得电,这时KM1常开触点闭合实现自锁,主电路中KM1常开触点闭合,电机在Y型电路中起动,时间继电器KT完成计时后,KT常开触头闭合常闭触点断开,KM3线圈失电,KM3常闭触点闭合,KM2线圈得电,KM2常开触头闭合完成自锁,KM2常闭触头断开KM3线圈和KT线圈都断电,KM3常开触头闭合,这时的电机已经转入△接法运转。
该电路的工作不太可靠,不稳定,时而能工作正常,时而工作不能正常。具体情况如下:
当KT线圈得电后,当设定的时间到达是KT常开触头闭合,致使KM2线圈得电,同时KM2常闭触头会断开,导致KM3和KT线圈失电,这时的 KT KT常开触头就会瞬时断开,但是KM2常开触头还没来得及闭合,使KM2线圈断电,导致自锁失败。
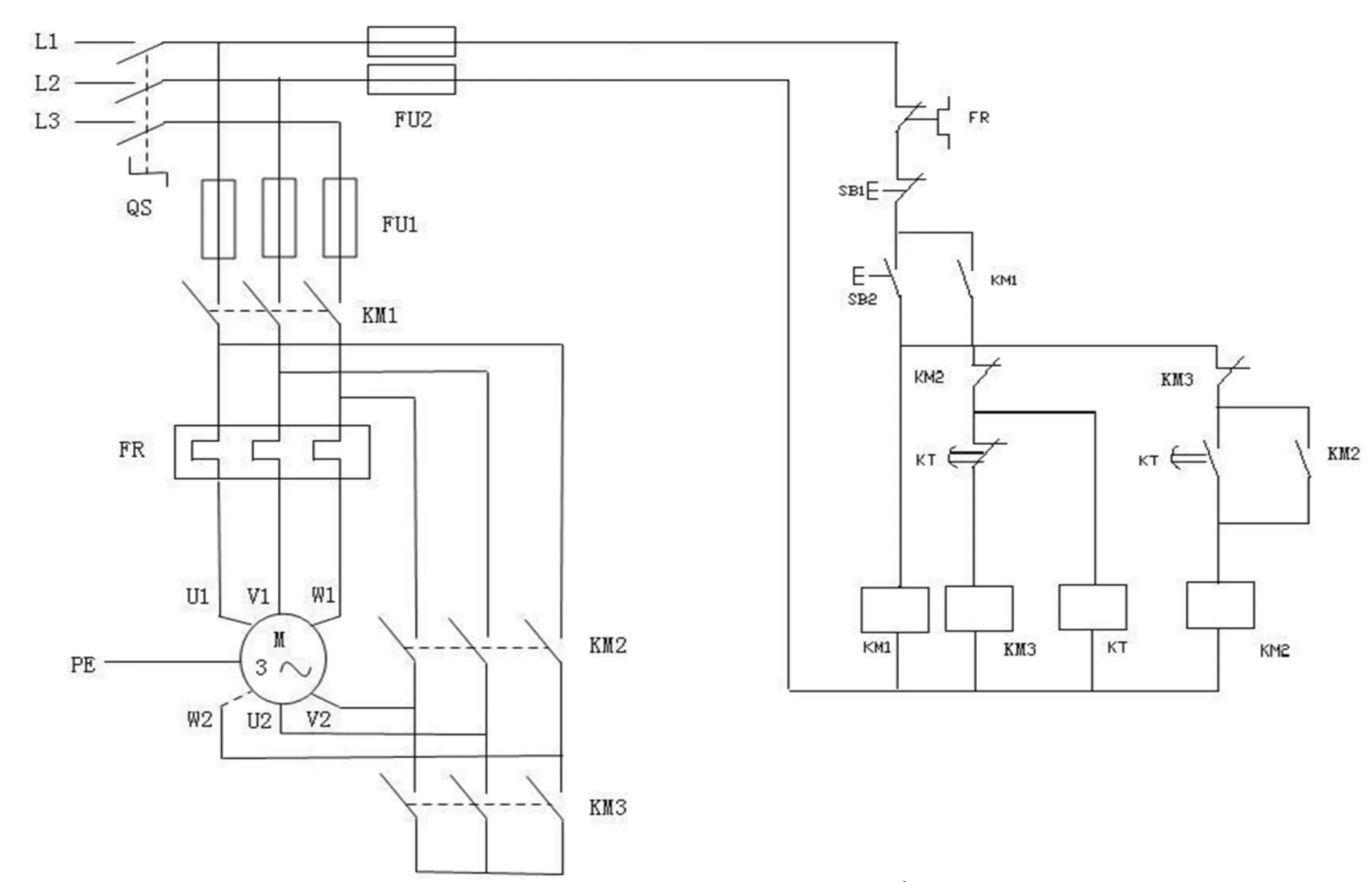
图5 常规控制电路
当这种发生时,电动机无法转换到△起动控制电路,一直处在Y接法的低压电路中运行,一定要及时处理,不然电机绕组被烧毁的可能性很大的。
3.2 典型的“竞争”控制电路
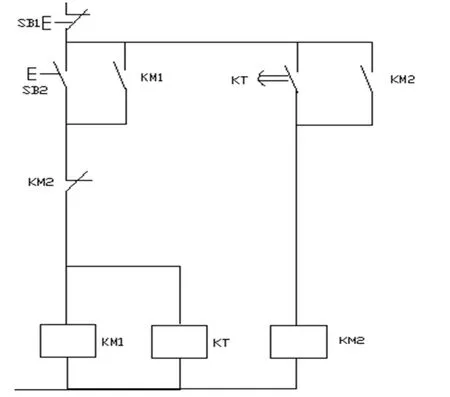
图6 典型的“竞争”控制电路
图6是典型的“竞争”控制电路,在电路的工作时候可以忽略触点闭合或断开需要的时间,图6中的控制电路的动作原理如下:
当起动按钮SB2被按压后,首先KM1线圈、 KT线圈得电。KM1常开触点闭合,形成自锁, KT延时完成后,常开触点闭合,使KM2线圈得电,然后KM2常开触点闭合,形成自锁,常闭触点断开,使KM1线圈、KT线圈失电;,KT常开触点在延时完成后也断开,KM2得电正常工作不会被影响。
然而实际情况却不是这样,我们在对上图示中的控制电路在实验室通电进行试验时,就可能会发现一种情况:在对KM2线圈通电后,KM2的触点工作不一定正常,有时候会只吸合一下就立即释放下来,就不能实现预期的自锁情况。
经过调查和实验得出结论,这种情况的发生是因为电路上存在竞争问题,换而言之就是对KM2线圈通电的同时,KM2常闭触点与常开触点的动作不是同时完成,分先后顺序,KM2常闭触点先断开,此时的KT线圈失电,致使KT常开触点会瞬时断开,而此时的KM2常开触点会发生刚接触就断开或者直接来不急闭合的情况,都会导致KM2线圈失电,使KM2自锁失败。那么在对控制电路进行设计时就不得不考虑电路中存在的竞争问题,一定要对设计的电路认真分析,将所以影响因素都考虑在内,避免出现竞争问题或现象。
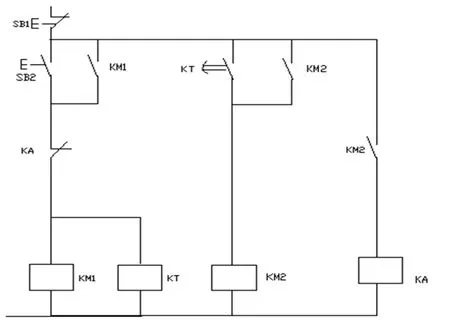
图7 典型的“竞争”控制电路
3.3 解决“竞争”采取的措施
可以如图(2)中电路进行改进,最终升级为如图(3)所示的电路,即在电路的右边并联一个中间继电器KA。电路被改进之后,在设定的时间达到后控制电路中的KT延时开关闭合,这时KM2线圈得电的同时 KM2的常开触点会闭合,中间继电器KA的线路被接通,然后 KA的常闭触点就会断开,这时KM1线圈、KT线圈都失电。根据这个原理,KM2的常开触点来实现KA得电和KM2的自锁这项功能,KA得电是有KM2得电并自锁来实现的,只有KA得电,KA的常闭触点就会断开,才会导致KT失电,那么,就会避免电路开关之间额竞争,保证在KM2自锁之后,KT线圈才失电。
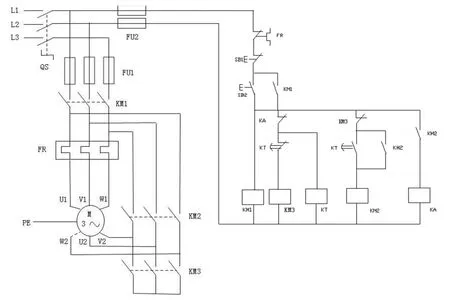
图8 典型的“竞争”控制电路
4 改进后的Y-△电路
在Y-△起动控制电路中,对线路的设计一定要合理,一定要考虑全面,这样,控制电路的工作才会可靠,更加准确。如图(1)电动机如果接在Y接法的控制电路中,这种情况一定要及时处理,电机就有被烧毁的可能性。
为了使控制电路更加准确和可靠,我们通常采用一些方法,例如将控制线路中的结构作一些调整;改变触点性能使触点的工作更加可靠;增加一些延时触头去改变各个触头之间存在的联系。同时,在设计时,一定有重视控制原理,设计思路一定要科学,结合实际情况,消除电路隐患,确保得到一个正常工作的电路。为了提高电路的可靠性,我们特意找到一个合适的时机将图示电路在实验室进行实验。在前文介绍过的接触器和继电器,适当选择一些进行试验。找到一个方法去解决竞争问题,将图(7)的接法改为如图(8)所示的接法,去掉KM2常闭触头,KT线圈通电,让KT常开触头闭合,将KM2线圈接通后,其中一个KM2常开触头闭合,完成自锁,让另外一个KM2常开触头的中间继电器的线圈闭合,之后中间继电器的触点才断开,从而断开KM3和KT的并联的支路。那么就解决了自锁失败而带来的苦恼。结果发现,电路中电器元件工作正常却不接中间继电器的情况下,自锁成功率的极限是80%;但是接入中间继电器,KM2自锁成功率却高达98%。当然材料成本相对以增大了一点,但提高了电路工作的准确性、可靠性和稳定性,生产更安全效率更高。
5 PLC控制Y-△电路
随着可编程控制技术的应用,采用该技术来控制也能达到预期效果。PLC控制有着优越于继电器操作盘控制的特点,并能够很好的进行实验、更改、扩展。但是通过PLC控制实验,同样要考虑“竞争”问题,并加以改进后“竞争”才消除,可以得到预期控制效果。
结合本学校的实际情况,所采用的可编程控制(PLC)型号为三菱FX2N系列,根据Y-△启动图(1)控制原理图采用PLC控制,列出相应的地址表如下:

?

转换梯形图如下图:
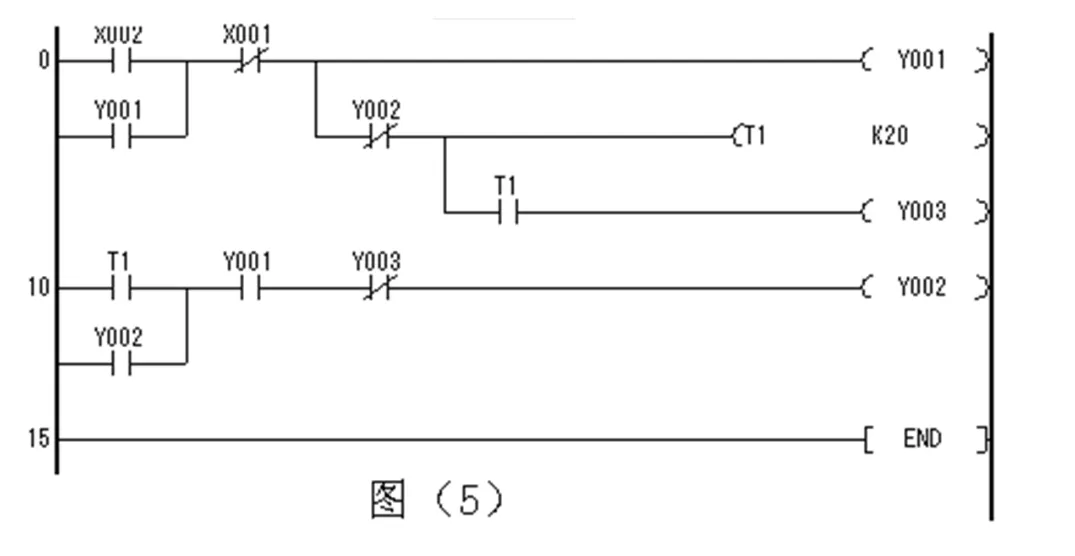
图(5)所示梯形图尽管完全是由电气控制原理图转换而成,但是电子设备的反映速度比实际低压电器要快得多,在实际的通电操作过程中,采用此种设计,依然存在着“竞争”。解决此类问题,由于PLC有着优越于继电器配电盘的特点,结构易于扩展和修改,通常我们在设计PLC控制流程中,都习惯性的添加一个短暂延时,在硬件上不需要添加设备,只在软件编程方面添加定时器和辅助继电器的应用。诸如改进后梯形图见图(6):
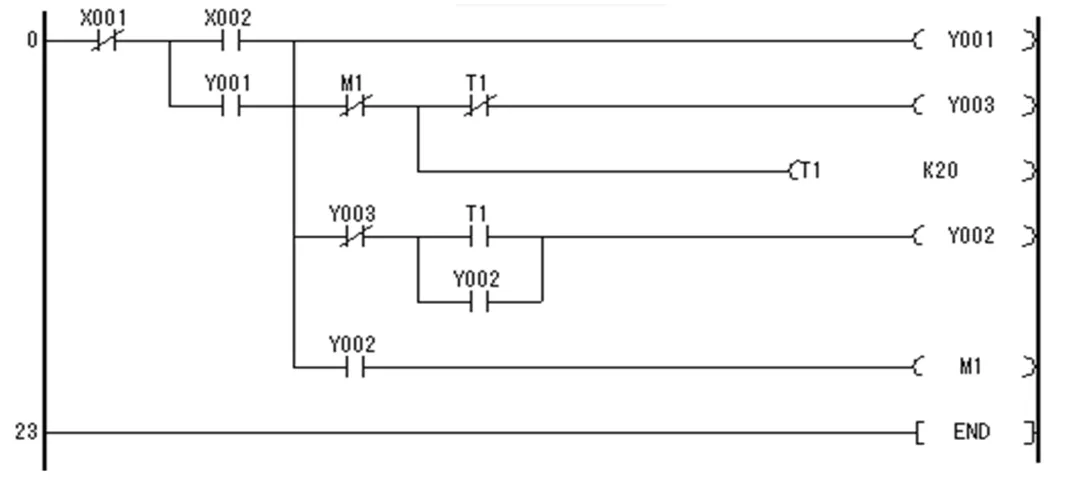
转换后梯形图如下图:
在图(6)PLC梯形图控制中,实际接线主电路和控制元件接口都与图(5)所示相同,仅仅只是在PLC的输出口多添加了一个辅助继电器M1的输出,它的控制效果,通过实验我们可以得到预期的控制目的。
总之,在企业实际生产过程中,对继电力拖动控制系统进行分析或设计的时候,一定不能忽略了“竞争”现象的存在,系统中的“竞争”隐患一定要被排除,增加系统的可靠性、安全性和生产效率。
[1]机及电力拖动[M],北京中国农业出版社,2004
[2]李瑞光,电机与电力拖动基础[M],杭州浙江大学出版社。2002
[3]候恩奎,电机与电力拖动[M],北京机械工业出版社1991
[4]张晓江,电机及电力拖动基础实验[M],北京机械工业出版社2006
