A320方向舵模拟排故系统设计
2015-11-04金冉赵彩霞郑步生
金冉+赵彩霞+郑步生
摘 要:本文针对A320方向舵的主要故障进行了模拟排故系统的设计。首先研究了方向舵常见故障的排故流程。然后在理论研究的基础上,设计了故障排除面板。用户通过拨动故障面板上的开关进行故障设置,然后根据故障排除手册(TSM)中的排故流程进行模拟排故。故障排除面板中结合了方向舵结构图以及串并联开关电路,所设计的电路在Proteus软件中进行了仿真,结果证明设计的电路是正确的。
关键词:A320;方向舵;模拟排故;演示面板
DOI:10.16640/j.cnki.37-1222/t.2015.21.025
1 引言
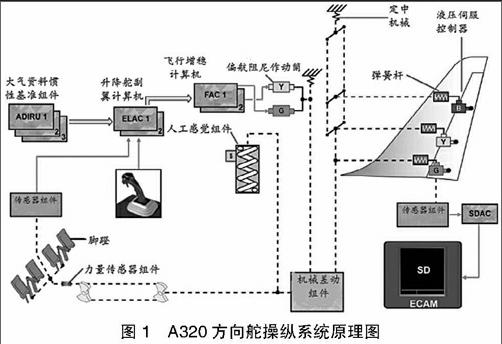
空客A320的方向舵位于垂直尾翼后部,是一个可以左右偏转的舵面,由三个并列的伺服控制组件控制其偏转。方向舵的作用是对飞机进行偏航操纵,修正飞机航向,主要用于角度较小的转向,也可以与副翼一起进行大角度转向。方向舵的操作涉及大量的部件,比如脚蹬、力量传感器、机械差动组件、ADIRU(大气资料惯性基准组件)、ELAC(升降舵副翼计算机)、FAC(飞行增稳计算机)、偏航阻尼伺服作动筒、人工感觉组件、定中机械、液压伺服控制器等等,如图1所示[1]。
方向舵部件一旦出现问题,则会影响飞机的飞行安全。方向舵的常见故障包括了机长和副驾驶脚蹬过硬,由方向舵引起的机身抖动,方向舵显示器与方向舵配平指针不一致,方向舵配平超过限制,人工感觉载荷不符合标准,方向舵指示器指针波动,方向舵伺服控制器的单独液压系统不符合标准,偏航阻尼系统故障等等。本文针对方向舵的主要故障类型,研究了模拟排除故障的系统,设计了故障排除面板。使用者通过拨动故障面板上的开关进行故障的设置,然后根据TSM中的排故流程进行模拟排故。
2 常见故障的排故方法
本文以这些故障类型中最典型的“机长和副驾驶脚蹬过硬”故障为例,说明系统和面板的设计。
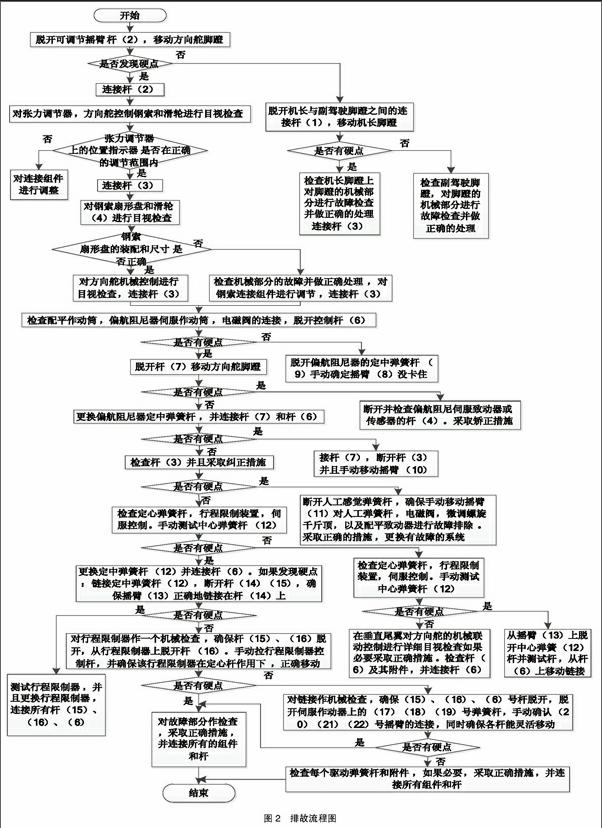
排故的流程如图2所示[2,3]。
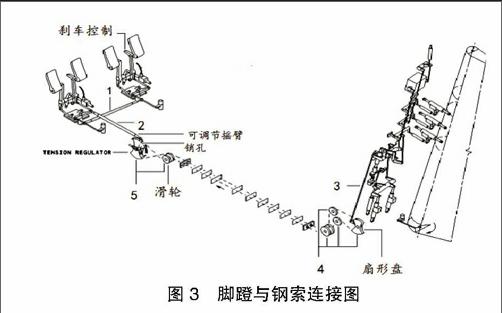
(1)如果发现存在硬点,检查脚蹬和钢索之间的链接,脱开钢索扇形盘与机械差动组件之间的杆(3)(见图3)的下位点,移动方向舵脚蹬。
(2)如果硬点继续存在,脱开可调节摇臂杆(2)(见图3),移动方向舵脚蹬。具体操作如下:
如果发现存在硬点,脱开机长与副驾驶脚蹬之间的连接杆(1)(见图3),移动机长脚蹬。如果硬点没有找到,检查副驾驶脚蹬,对脚蹬的机械部分进行故障检查并做正确的处理。如果找到硬点,检查机长脚蹬,对脚蹬的机械部分进行故障检查并做正确的处理。连接杆(3)。
如果硬点没有找到,连接杆(2)。
如果故障仍存在,对张力调节器,方向舵控制钢索和滑轮进行目视检查,确保钢索准确地安装在滑轮凹糟和张力调节器上,确保张力调节器上的位置指示器处于正确的调节范围内。
如果张力调节器上的位置指示器不在正确的调节范围内,对连接组件进行调整。
如果张力调节器上的位置指示器在正确的调节范围内,连接杆(3)。
如果故障仍存在,对钢索扇形盘和滑轮(4)(见图3)进行目视检查,确保钢索准确地安装在滑轮凹槽中和钢索扇形盘上。检查装配和尺寸是否正确。
如果钢索扇形盘的装配和尺寸正确,对方向舵机械控制进行目视检查,连接杆(3)。
如果钢索扇形盘的装配和尺寸不正确,检查机械部分的故障并做正确处理,对钢索连接组件进行调节,连接杆(3)。排故流程如图4.4所示。如果找到硬点,连接杆(3),检查配平作动筒,偏航阻尼器伺服作动筒,电磁阀的连接,脱开控制杆(配平作动筒,偏航阻尼器伺服作动筒和传输连接之间的杆(6)(见图4),移动方向舵脚蹬。
如果找到硬点,脱开杆(7)(见图4),移动方向舵脚蹬。
如果硬点没找到,脱开偏航阻尼器的定中弹簧杆(9)(见图4),手动确定摇臂(8)(见图4)没卡住。
如果没找到硬点,更换偏航阻尼器定中弹簧杆,并连接杆(7)和杆(6)。
如果找到一个硬点,断开并检查偏航阻尼伺服致动器或传感器的杆(4)。采取矫正措施,并连接杆。
如果发现硬点,连接杆(7),断开杆(3)并且确保手动移动摇臂(10)(见图4)。
如果没有发现硬点,检查杆(3)并且采取纠正措施。
如果找到一个硬点,断开人工感觉弹簧杆,确保手动移动摇臂(11)(见图4)。对以下组件进行故障排除,人工弹簧杆,电磁阀,微调螺旋千斤顶,以及配平致动器。采取正确的措施,替换有故障的系统,并且连接杆。
如果没有发现硬点,检查定心弹簧杆,行程限制装置,伺服控制。手动测试中心弹簧杆(12)(见图5)。
如果没有发现硬点,在垂直尾翼对方向舵的机械联动控制进行详细目视检查如果必要采取正确措施。检查杆(6)及其附件,并连接杆(6)。
如果发现硬点,从摇臂(13)上脱开中心弹簧(12)杆并测试杆,从杆(6)上移动链接。如果没有发现硬点:更换定中弹簧杆(12)并连接杆(6)。如果发现硬点:链接定中弹簧杆(12),断开杆(14)(15),确保摇臂(13)正确地链接在杆(14)上(见图5)。
如果故障继续存在,对行程限制器作一个机械检查,确保杆(15)、(16)脱开,从行程限制器上脱开杆(16)。手动拉行程限制器控制杆,并确保该行程限制器在定心杆作用下,正确移动。
如果找到一个硬点,测试行程限制器,并且更换行程限制器,连接所有杆(15)、(16)、(6)。
如果硬点没有被发现,那么对链接作机械检查,确保(15)、(16)、(6)号杆脱开,脱开伺服作动器上的(17)(18)(19)号弹簧杆,手动确认(20)(21)(22)号摇臂的连接,同时确保各杆能灵活移动。endprint
如果依然没有发现硬点,检查每个驱动弹簧杆和附件,如果必要,采取正确措施,并连接所有组件和杆。
如果找到硬点,对故障部分作检查,采取正确措施,并连接所有的组件和杆。
3 A320方向舵模拟排故系统的设计
本文设计的故障排除面板如图6所示,用户可以利用面板上的开关设置故障,并结合工卡排故流程进行模拟排故。设置故障时面板会有警告,排除故障后警告解除。
3.1 模拟排故面板设计
本面板模拟的故障是“机长副驾驶脚蹬过硬”。面板上共有两个区域:系统故障报警灯和方向舵机械连接图。机械连接图中引出的线框表示此部件可以设置故障开关,故障开关设置在图6中标注文字的位置。如果用户设置了故障,也就是断开了某一开关,则面板上“系统故障报警灯”区域会有红灯亮起;当故障排除时所有红灯熄灭,只有“显示系统正常”的绿灯保持亮着的状态。红灯在这一区域的安放位置是随机的,且未做任何标注,所以当用户排除故障时不会知道是哪个零件出现了问题,这一定程度上契合了实际情况。用户通过拨动开关的方式对部件进行排故。
3.2 电路连接
电路图7中的开关编号与图6中的编号一致,分别表示对应的部件,开关断开表示部件有故障,开关闭合表示部件无故障。当开关全部闭合,即表示整个系统无故障,此时没有红灯亮起;当有一个开关断开时会有至少一个红灯亮起。参考TSM给出的故障排除流程,按顺序依次拨动开关,当某一开关被拨动后全部红灯消失就代表该开关对应的组件有故障,如果仍然有红灯亮着就表示故障不在此开关所对应的组件,将开关拨回原位后继续检查下一个组件,直至所有红灯熄灭,绿灯亮起[4]。
图7是根据设计的电路在Proteus软件中搭建的模拟仿真图,每个组件上设置一次故障,按照TSM给出的排故流程,进行模拟排故。结果表明每个组件上的故障都可以按照预定要求消除,电路可靠准确,目标可以实现。
4 结论
本设计对方向舵主要故障的模拟排除进行了演示。研究了A320方向舵常见故障的排除方法,设计出了使用开关设置故障的模拟故障面板。经过Proteus软件的模拟,证明该模拟排故系统的设计方案是可行的。
参考文献:
[1] A320 Technical Training Manual. Airbus Industrial[Z].
[2] A320 Trouble Shooting Manual. Airbus Industrial[Z].
[3] A320 Aircraft Maintenance Manual. Airbus Industrial[Z].
[4]秦曾煌.电工学电子技术.第七版[M].北京:高等教育出版社,2009.
基金项目:江苏省高校自然基金面上项目(15KJB590001)
作者简介:金冉(1985-),女,江苏启东人,硕士,讲师,主要从事:民航机务方向的科研和教学工作。endprint