三相四桥臂逆变器的设计与控制
2015-11-02赵振民宋海明
赵振民,张 宁,宋海明
(黑龙江科技大学 电气与控制工程学院,哈尔滨 150022)
三相四桥臂逆变器的设计与控制
赵振民,张宁,宋海明
(黑龙江科技大学 电气与控制工程学院,哈尔滨 150022)
为了解决不平衡负载影响电能质量的问题,在传统的三桥臂逆变器的基础上采用三相四桥臂逆变器。该逆变器可以在不平衡负荷的情况下,能够有效地抑制不平衡负载电流对电压的扰动,保证输出的三相电压近似对称。为了验证该逆变器控制策略,硬件拓扑结构以及三维空间矢量调制算法的可行性,进行MATLAB仿真。结果表明,三相四桥臂逆变器能够解决在不平衡负载下输出三相对称电压的问题,其功能和三维空间矢量调制策略可行。
不平衡负载;三相四桥臂逆变器;三维空间矢量调制
0 引 言
太阳能光伏发电是新能源和可再生能源发电的重要组成部分,是公认的世界上最有前景的新能源技术。因此,光伏并网逆变器系统成为绿色新能源发展的一个热点[1]。逆变器控制技术发展很快,但随着负荷种类的增多,很容易出现三相负载不平衡的状态,此时,输出的三相电压很难达到平衡,在一定程度上会影响负荷的正常使用。为此,学者们[2-5]利用三维空间矢量调制技术控制三相四桥臂逆变器系统,解决负载不平衡情况下造成的输出电压不平衡的情况。基于此,笔者对三相四桥臂逆变器的设计和控制进行研究。
1 逆变器的拓扑结构
三相逆变器能在三相对称负载下输出三相对称电压,但很难在不对称负载下输出三相对称电压。近年来,一种新的三相四桥臂逆变器在传统的三桥臂逆变器基础上增加一个桥臂,从而得到广泛应用[2]。
三相三桥臂逆变器原理如图1所示。逆变器由三条桥臂组成,当它运行于三相不平衡负载下时,将输出不对称的三相电压[3]。
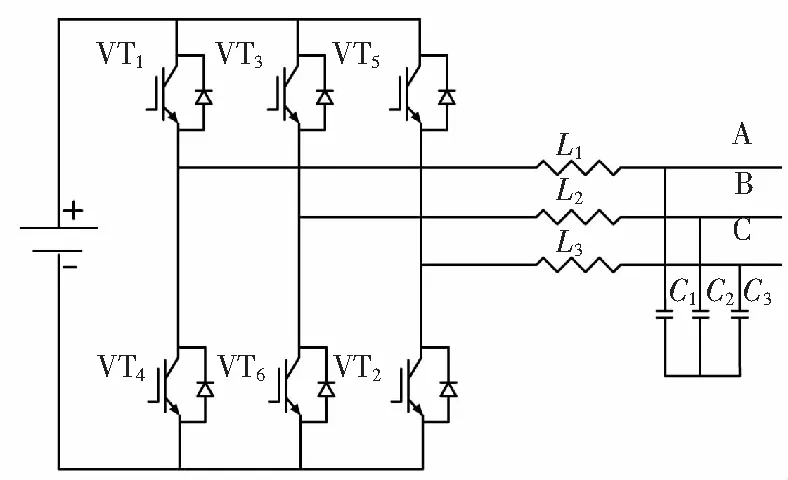
图1 三相三桥臂逆变器
为能使三相逆变器在很多领域得到应用,必须使它有能力在不平衡负载下正常运行[4]。因此,三相四桥臂逆变器逐步产生并发展。三相四桥臂逆变器原理如图2所示。通过增加一个桥臂来直接控制中性点电压,从而产生三相独立电压,使其有能力在不平衡负载下维持三相电压对称输出[5]。
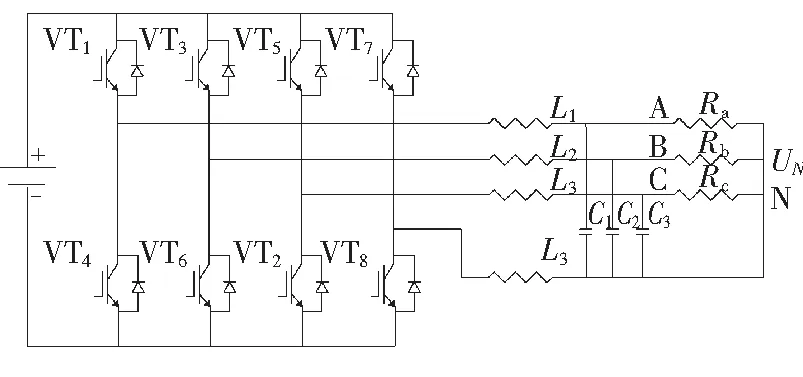
图2 三相四桥臂逆变器
2 三相光伏逆变器的控制方法和算法
三相四桥臂逆变器的控制方法主要有:PWM控制、滞环电流控制、空间矢量调制方法等[6]。其中空间矢量控制方法具有开关损耗小、电压利用率高、便于数字化管理等[7]特点,因此,该控制方法成为最广泛的脉宽调制策略之一。SVPWM本质是使得输出电压矢量轨迹沿着预定轨道旋转,但由于第四个桥臂的引入,使得输出电压的空间矢量不在同一平面内,因此,必须采用3D-SVPWM方法进行控制。
三维空间矢量控制的任务就是通过跟踪开关向量对参考电压矢量进行合成。三维空间向量可以分为两个步骤[8]:第一步选择开关矢量,计算每个开关矢量的持续时间;第二步确定基准转换的序列向量。
2.1开关矢量的选择
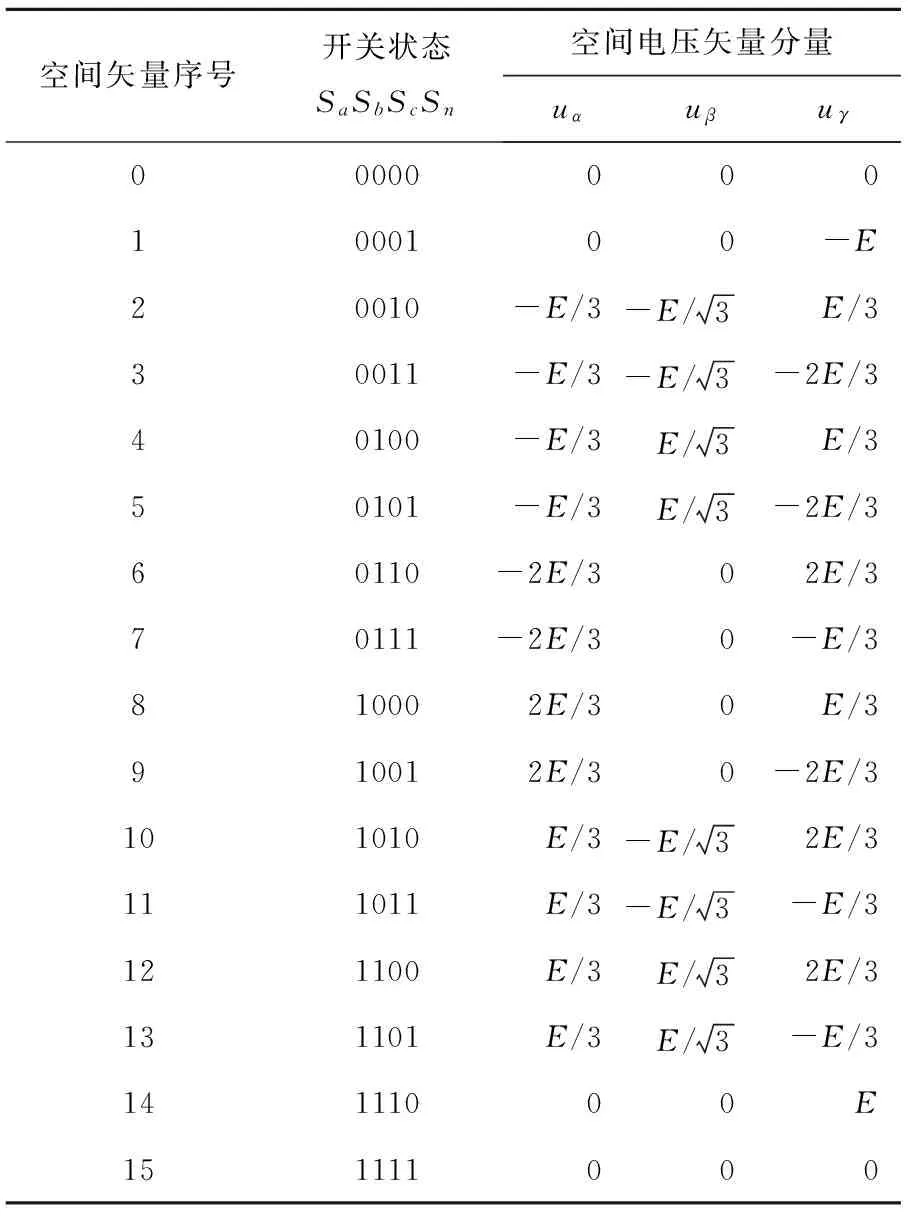
在三相四桥臂逆变器中,每个桥臂都有两种开关状态,共包含16种开关状态[9]。其中包括2个零矢量和14个非零矢量。各开关状态与相对应于的各矢量分量如表1所示。
表1各开关状态与相对应于的各矢量分量
Table 1Switch state and corresponding to eachvector component
空间矢量序号开关状态SaSbScSn空间电压矢量分量uαuβuγ000000001000100-E20010-E/3-E/3E/330011-E/3-E/3-2E/340100-E/3E/3E/350101-E/3E/3-2E/360110-2E/302E/370111-2E/30-E/3810002E/30E/3910012E/30-2E/3101010E/3-E/32E/3111011E/3-E/3-E/3121100E/3E/32E/3131101E/3E/3-E/314111000E151111000
经过坐标变换可将三相电压由abc坐标系变换成三维αβγ坐标系,那么,每一种开关就对应一种空间矢量。空间电压矢量如图3所示。将六棱柱投影到αβ面上,即为二维空间矢量图,将六棱柱分为六个小三棱柱,每个三棱柱为60°区域。
每一个60°区域中是一个相邻的向量四面体,而每个四面体是由三个相邻的非零矢量和两个零矢量构成,一共24个四面体。
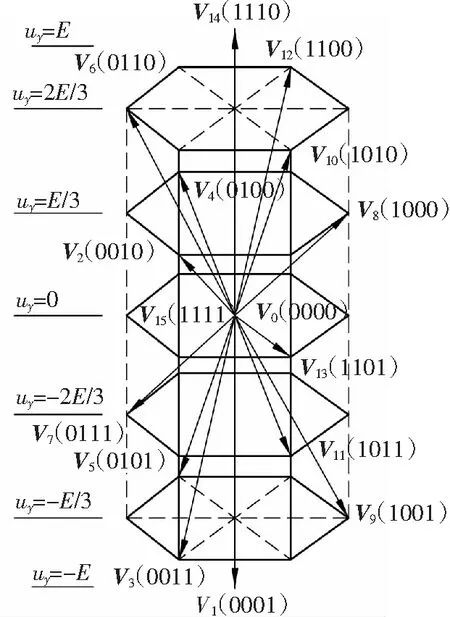
图3 空间电压矢量
开关矢量的实际持续时间可以通过计算获得,计算方法与三桥臂逆变器中矢量持续时间的计算方法一致。首先,必须经过坐标变换,从三相的abc转换到的空间的αβγ坐标系中,然后,再计算各矢量的作用时向。此种控制算法能简单有效的计算出各个矢量的作用时间,避免了传统计算下的复杂性。设每个四面体中三个非零矢量为V1、V2、V3,ti是Vi的作用时间,i=1、2、3,零矢量作用时间为t0,则
t1+t2+t3+t0=Ts,
(1)
V1t1+V2t2+V3t3=VTs,
(2)
根据“伏秒平衡”原则,得
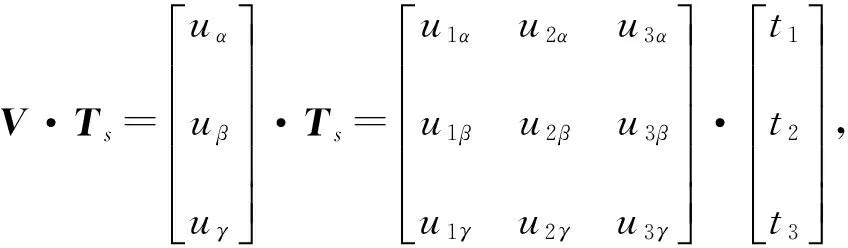
(3)
由式(3)变换,得
(4)
其中,uα,uβ,uγ分别是V在αβγ坐标系中的分量。u1α,u1β,u1γ分别是V1在αβγ坐标系中的分量。
当出现过调制时,即t1+t2+t3>Ts,则不用零矢量作用,非零矢量作用时间为:
(5)
2.2开关矢量顺序的选择
选择合理的开关矢量顺序不仅可以降低开关动作频率,降低开关切换损耗,而且还能减少输出电压的THD。在三相三桥臂逆变器中,一般选择相邻的交替转换顺序,三相四桥臂逆变器的选择也可参考三桥臂的顺序[10]。图4提供了两种选择方案:其一,基于对称情况下的对称开关顺序;其二,基于零矢量旋转工作模式下的开关顺序。在对称负载的情况下,输出电压的THD为2.3%,在非对称负载的情况下,输出电压的THD为4.8%。一般情况下,选择对称开关顺序。
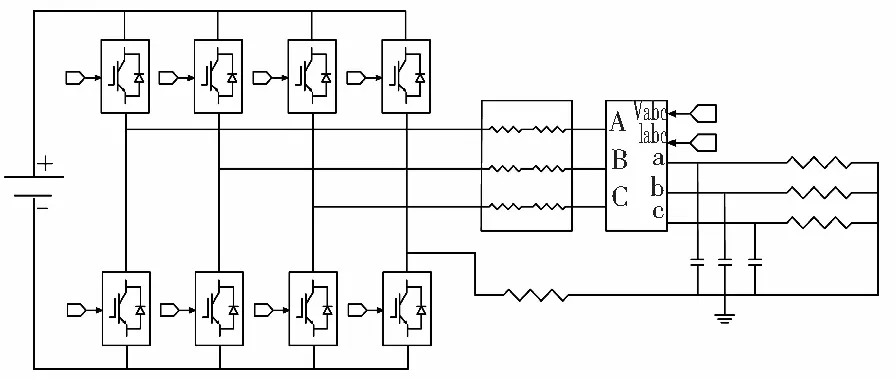
图4 开关矢量顺序的选择
3 仿真结果
为了证明该逆变器控制策略、硬件拓扑结构以及三维空间矢量调制算法的可行性,进行模型的建立与仿真。在MATLAB中建立仿真模型,如图5所示。以A相接阻性负载来模拟不平衡的情况。
图5 仿真主电路
当三相负载相同时,设阻值均为10 Ω,仿真结果如图6所示。输出的三相电压和电流都是对称的,经过第四个桥臂的电流几乎为零。

图6 在负载平衡下输出的三相电压电流
Fig.6Under condition of load balancing three-phasevoltage and current output
当负载处于不平衡的情况下,设A相电阻为10 Ω,B相电阻是30 Ω,C相电阻为45 Ω,仿真结果如图7所示。从图7可以看出,输出的三相电流是不对称的,主要是因为接在三相的负载阻值不一致,但由于第四个桥臂的调节作用,使输出的三相电压近似相等对称,电压相等,阻值不同,这就导致了三相电流输出幅值有一定的差距,其中有部分电流流过了中点N,四个桥臂流过的总电流之和为零:即IA+IB+IC=0。但输出的三相电压是近似平衡的,主要是由于第四个桥臂的存在,抑制负载不平衡电流对电压的扰动,第四个桥臂提供了不平衡电流来抑制由电感电流产生的不平衡电压。这样就能够在一定程度上使输出的三相电压波形近似平衡,基本能够解决三相电压不平衡的问题。
当三相负载对称时,输出的三相电流和电压都是对称的,空间矢量轨迹位于αβ平面内,在γ轴上分量为零,γ轴是一个固定值,在αβ平面投影为一个圆。当三相负载不对称时,输出的三相电压几乎对称,但输出的三相电流是不对称的,空间矢量轨迹位于αβγ三维空间内,在γ轴上有一定的分量,γ轴上的值会影响中央线的电流值,在αβ平面投影为一个椭圆。
经过MATLAB仿真后的图形如图8所示,从图8中可以清晰的看到空间矢量在三维空间的运行轨迹。
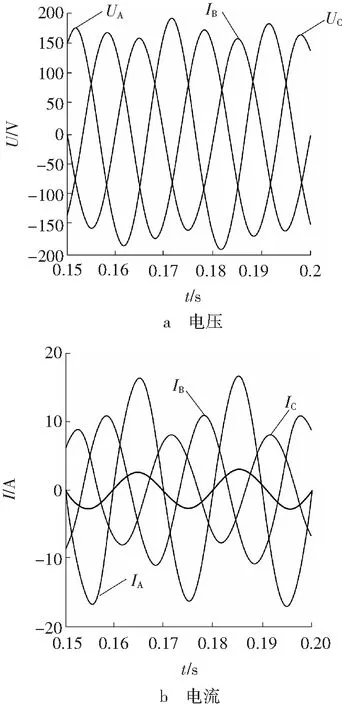
图7 在负载不平衡下输出的三相电压电流
Fig.7Under condition of load unbalancingthree-phase voltage and current output
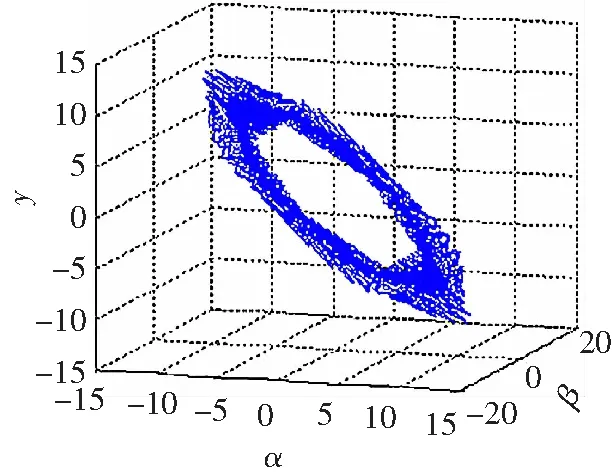
图8 不平衡下三相电流在空间运动轨迹
Fig.8Under unbalanced three-phase currenttrajectory in space
4 结束语
三相四桥臂逆变器的拓扑结构简单,三维空间矢量调制策略有良好的功能。在三相不平衡情况下,传统的逆变器不能满足输出三相电压的平衡性,而新的三相四桥臂逆变器在一定程度上能够解决这一问题。通过MATLAB仿真,进一步验证了该逆变器的功能及三维空间矢量调制策略的可行性,具有一定的使用价值。三相四桥臂逆变器在未来的应用也将会越来越好。
[1]董锋斌,皇金峰,傅周兴.一种三相四桥臂逆变器的数学模型分析[J].电力自动化设备,2011,31(6):98-101.
[2]王先为,卓放.三相四桥臂并联逆变器的零序电流建模与控制[J].西安交通大学学报,2012,46(10):8-14.
[3]张晓勇,王军,李川.基于三维空间矢量中γ分量控制的三相四桥臂逆变器[J].电力自动化设备,2010,30(12):70-87.
[4]余雷,肖蕙蕙,李山.三相四桥臂逆变电源控制策略[J].重庆理工大学学报,2013,27(4):72-76.
[5]顾和荣,王德玉,沈红.三相四桥臂逆变器控制技术研究[J].电力系统保护与控制,2011,39(4):41-46.
[6]林渭勋.现代电力电子技术[M].北京:机械工业出版社,2006.
[7]郑宝宏,徐子婷.基于四桥臂逆变器的电压平衡控制算法研究[J].机电技术,2014,21(5):76-78.
[8]苏森,王志强,谢长静.四桥臂逆变器的三维空间矢量脉宽调制[J].电气应用,2014,15(5):47-51.
[9]张德丰.MATLAB/Simulink建模与仿真实例精讲[M].北京:机械工业出版社,2011.
[10]周啸,金新民,唐芬.不平衡负载条件下三相四桥臂变流器的改进分序控制[J].高电压技术,2014,40(8):2504-2512
(编辑徐岩)
Design and control of three-phase four-leg inverter
ZHAO Zhenmin,ZHANG Ning,SONG Haiming
(School of Electrical &Control Engineering,Heilongjiang University of Science &Technology,Harbin 150022,China)
This paper introduces a three-phase four-leg inverter designed specifically for addressing the influence of unbalanced load on electric energy quality.This inverter,developed from a traditional three-leg inverter,works better for effectively suppressing the disturbance of unbalanced load current on voltage despite the presence of unbalanced load,thus ensuring the approximate symmetry in three-phase output voltage.The inverter proves feasible when validated by MATLAB simulation of the inverter control strategy,hardware topology structure and 3D-SVPWM.The results verify that the inverter is a solution to the symmetry in three-phase output voltage in the presence of unbalanced load.
unbalanced load;three-phase four-leg inverter;3D-SVPWM
2015-01-10
赵振民(1967-),男,黑龙江省双城人,教授,博士,研究方向:机器人控制、高频功率变换、软开关技术,E-mail:695152037@qq.com。
10.3969/j.issn.2095-7262.2015.02.022
TP273
2095-7262(2015)02-0219-05
A