基于CAN总线的雷达温湿度采集系统设计
2015-11-02创新者
创新者:尤 路
基于CAN总线的雷达温湿度采集系统设计
创新者:尤 路
温湿度参数对于雷达等电子设备的运行保障非常重要,本文利用CAN总线,对雷达等复杂电磁环境设备温湿度信息的采集提供了有效的解决方案,并从系统构建、软硬件设计等方面提供了有力的技术支撑,值得在军用电子及工业控制领域推广应用。
雷达等电子设备运行环境中温湿度等参数的感知,对于设备健康状态的分析及预测起到非常重要的作用。尤其是高设备密度、强电磁干扰环境下,CAN总线的运用,在保证抗干扰能力的同时,还可大大简化设备对外接口,减少设备间电缆连接,提升监测系统的可靠性。
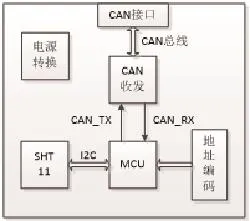
图2 温湿度传感器基本架构
系统设计
某雷达的温湿度采集系统主要是由天线阵面上的温湿度传感器和舱内采集设备组成,分布于天线阵面上的温湿度传感器通过CAN总线相连,单个CAN总线理论上最多可挂载110个节点,考虑总线负载情况,实际使用时总线上只挂载60个。舱内采集设备由CAN控制器和显示上位机组成,CAN控制器将CAN总线上的数据转换成网络数据送至上位机显示,如图1所示。
硬件设计
温湿度传感器主要由两部分组成,传感器和处理器,如图2所示。其中温湿度传感器采用数字型温湿度传感器SHT11,处理器选用含有ARM Cortex-M3内核的STM32F103C8处理器。传感器信号由MCU采集并计算完成后,通过CAN总线送出。
每个传感器上都有一个拨码开关负责CAN总线地址的编码,用于区分总线上各个传感器的ID号。为了提升CAN接口的可靠性,CAN接口部分,除了CAN收发器外,增加了防浪涌保护电路,如图3所示。
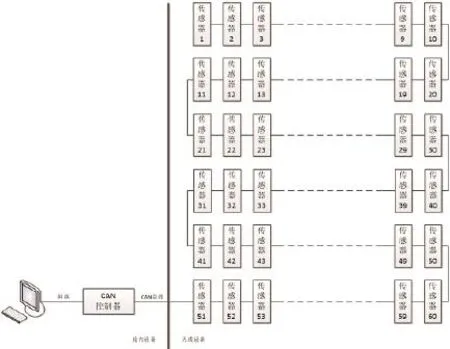
图1 某雷达CAN总线环境感知系统的组成
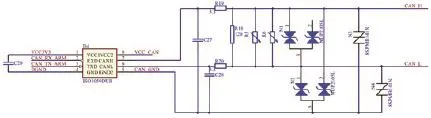
图3 CAN总线接口电路
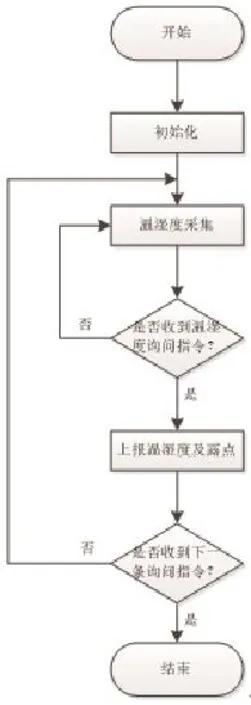
图4 温湿度传感器软件流程
软件设计
系统采用问询制的协议进行通信,即上位机发送询问指令,ID匹配正确后,传感器才进行应答。CAN总线的速率为125Kbps,8字节标准数据帧的帧长约为864us,询问每个传感器所需的最短时间为1.728ms,足以满足系统的使用要求。下面将从系统的底层至顶层详细介绍软件的设计流程。
温湿度传感器软件设计
由于SHT11的两线通信与I2C协议不兼容,在STM32进行编程时,通过控制连接传感器的两个GPIO管脚进行协议解析。系统上电之后,进行传感器的初始化,对传感器进行复位,随后进行温度测量和湿度测量,再根据温度和湿度,计算出露点,根据CAN总线接收到的控制指令,将采集的数据加入CAN总线通信协议送出,如图4所示。这样极大的缓解总线的占用时间,以最快的速度进行响应。
系统上位机的软件设计
由于CAN控制器的功能是用于CAN总线与网络的信息格式转换,所以其软件功能较为单一,主要是侦收网络和CAN总线上的信息,并将信息互相透传。这样上位机软件通过问询制对所有的温湿度传感器进行询问时,网络数据协议与CAN总线协议兼容。上位机通过遍历ID号对CAN总线上所有温湿度传感器进行轮询,轮询间隔为1s,轮询过程中一旦出现无回馈现象则上报故障,最终将所有温湿度信息及故障状态全部送至显示界面显示,工作流程如图5所示。
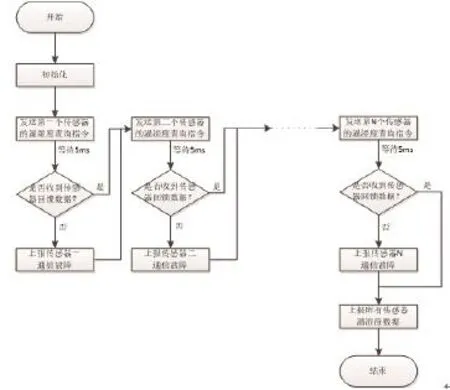
图5 系统上位机工作流程
结语
以CAN总线为基础构建的雷达温湿度测量系统,系统稳定,抗干扰能力强,能够满足复杂电子环境下的温湿度采集任务,并具有成本低、接口简单、维护方便等优点,值得在军用电子、工业控制等领域进行推广。
10.3969/j.issn.1001-8972.2015.10.028