捷变PRF技术在斜视聚束SAR中的应用
2015-11-01罗绣莲
罗绣莲 徐 伟 郭 磊②
①(中国科学院电子学研究所 北京 100190)
②(中国科学院大学 北京 100039)
捷变PRF技术在斜视聚束SAR中的应用
罗绣莲*①②徐伟①郭磊①②
①(中国科学院电子学研究所北京100190)
②(中国科学院大学北京100039)
该文关注一种新型的斜视聚束SAR模式,其采用捷变脉冲重复频率(PRF)技术来增加高分辨率成像时的距离向测绘带宽。聚束SAR利用波束旋转来增加方位向分辨率。然而,高分辨率和大斜视的成像要求会导致较大的距离单元徙动(RCM)。PRF固定不变(即接收窗固定)时,为了保证方位向数据获取时间内所有的回波脉冲能被完整接收,距离向测绘带宽对应的时间宽度必须小于接收窗宽度。为了消除RCM对测绘带宽的影响,该文将PRF沿着方位向时间连续地改变(捷变),使得接收窗的变化与瞬时斜距的变化一致。首先推导了PRF的变化规律,然后利用一种改进的后向投影算法(BPA)对回波数据成像,最后通过仿真实验验证这种SAR模式及对应的成像算法。关键词:合成孔径雷达(SAR);斜视聚束;捷变PRF;高分辨率;后向投影算法(BPA)
1 引言
测绘带宽和分辨率是星载SAR系统的两个重要指标[1]。聚束SAR[2-4]通过牺牲方位向连续测绘带宽来提高方位向分辨率。Mosaic模式[5]利用聚束SAR在多个不同斜视角处成像,将获得的雷达图像进行后期拼接,进而提高方位向测绘带宽。另外,在军事目标的检测和监视[4]中,可能会要求对感兴趣的区域在短时间内进行多次成像,因此需要斜视聚束成像。不同斜视角成像还能得到地面目标的不同散射特性[4]。总的来说,斜视聚束模式是未来SAR发展的一个重要方向。
聚束式SAR中,随着分辨率和斜视角的增加,合成孔径时间和距离单元徙动(RCM)增大[6]。为了实现全球观测,系统设计中有的波位必须紧挨着信号接收截止区(盲区)。由于RCM的影响,某些方位位置的回波脉冲可能会超出接收窗;反过来,为了保证所有的回波脉冲被完全接收,必须减小距离向测绘带宽。为了消除RCM对测绘带宽的影响,可以连续地改变PRF[6],使得接收窗或者盲区的变化与瞬时斜距的变化一致。在条带式SAR中,文献[7-9]采用周期线性改变脉冲重复间隔(PRI)的方法,以获得超宽测绘带宽。其本质是将固定斜距的盲区分散到整个测绘带。对于测绘带内的每一个斜距,大部分回波脉冲被完整接收。当PRI快速周期线性变化时,每个变化周期内将有1个或者2个脉冲丢失[9],因此完全接收到的脉冲呈周期非均匀分布。为了恢复均匀采样信号,文献[9]提出了一种改进的多通道重建算法。
本文将捷变PRF技术扩展到斜视聚束SAR中,得到的回波数据在方位向呈非均匀分布。由于这种非均匀性不再具有周期规律,因此均匀信号不能由多通道重建算法恢复。一种方法是利用插值算法来插值近似[8,10],然后采用常用的频域成像算法两步式算法(TSA)[3,4]进行成像。但是,插值误差会对TSA有一定的影响。另一种方法是采用时域BPA成像[11,12],由于BPA可以直接处理非均匀采样的回波数据,因此不存在插值误差。然而,由于接收窗记录的每个回波脉冲的第1个样本对应的距离延时会随着PRF的变化而变化,所以需要修改传统的BPA来适应这种变化。
2 基于捷变PRF技术的斜视聚束SAR
2.1斜视聚束SAR
斜视聚束SAR的成像几何如图1(a)所示。由于轨道模型不是本文研究的重点,本文假设在数据获取时间内,飞行路径为直线,地球为平面并且不旋转。天线波束始终指向成像场景的中心,场景中心到平台的最近斜距为Rc,X为波束足迹宽度,XI为数据获取时间T内平台的飞行距离,vr为平台的等效飞行速度,θc为斜视角,θs和θe分别为数据获取开始时刻和结束时刻对应的瞬时斜视角。由点目标(R0,x0)散射的回波可以表示为:

其中fc为发射脉冲载频,kr为发射脉冲调频率,c为光速,τ为距离向时间,η为方位向时间,Tp为脉冲宽度,R(η)为瞬时斜距,表示为:

成像场景的多普勒总带宽为[4]:

其中laz为天线长度,Br为发射脉冲带宽。总的多普勒带宽由3部分组成:方位向波束宽度导致的Bf;斜视角θc形成的Bsq;多普勒中心旋转造成的Bs。图1(b)展示了回波数据在方位时频域(TFD)中的支持域。通常情况下,系统PRF仅仅比Bf大,如果采用频域TSA进行成像,在将数据变换到多普勒域之前,需消除Bs和Bsq造成的频谱混叠。成像得到的方位向分辨率约为vrBs。

图1 斜视聚束SARFig.1 The squint spotlight SAR
2.2距离单元徙动(RCM)
系统PRF固定不变时,接收窗或盲区与瞬时斜视角的关系如图2所示。可以看到,盲区位置不会随瞬时斜视角的变化而变化,而测绘带对应的斜距范围却因雷达平台的移动而改变。因此,为了接收到所有的回波脉冲,系统所允许的最大测绘带宽对应的时间宽度Δt为:

其中Rrcm为场景中心的最大RCM,Δw为成像场景到坐标原点O的最大和最小斜距之差,在图1(a)所示的几何中为OB-OA。除此之外,RCM很大时会导致较多的数据存储冗余,如图2所示。注意这里是以场景中心的RCM为参考,场景边缘的RCM与场景中心会有一定差异。
表1给出了几种不同分辨率和不同斜视角情况下的聚束SAR系统参数,可以看出场景中心的RCM与Δw之比随着分辨率和斜视角的增加而增大。实际系统设计中往往还要考虑NESZ,AASR,RASR和斜视角对测绘带宽的影响。因此实际测绘带宽比表1中Δw的值小,而RCM却不变,RCM与测绘带宽之比将比表1中RCM与Δw的比值更大。
前面提到场景中心和边缘点的RCM会有一定的差异。下面给出表1中30°斜视角,0.3 m分辨率情况下,几种场景大小对应的场景中心和边缘点的RCM,如表2所示。可见,即使是30 km×30 km的测绘带宽(实际系统中并不能达到这么大的测绘带宽),场景中心和边缘点的RCM差异在0.5 km以内,相比于测绘带宽和RCM,这种差异可以忽略。因此在下面对PRF变化方案的推导中,仅仅考虑场景中心的距离历程变化。另外,为了说明Δw和测绘带宽的区别,表2还给出了成像场景到坐标原点O的最大和最小斜距差Δw。可见在大斜视星载聚束SAR系统中Δw大于距离向测绘带宽。

图2 PRF固定不变时接收窗与瞬时斜视角的关系Fig.2 Reception window versus instantaneous squint angle for constant PRF

表1 RCM与Δw之比Tab.1 The ratio of RCM toΔw

表2 不同场景大小时场景中心与边缘的RCMTab.2 The RCM of scene center and edge for different scene sizes

图3 PRF变化时接收窗与瞬时斜视角的关系Fig.3 Reception window versus instantaneous squint angle for varying PRF
2.3PRF变化方案
本小节将设计一种PRF变化方案,使得接收窗与瞬时斜视角的关系如图3所示。这样回波的有效时间将扩展到整个接收窗,也就是说RCM对测绘带宽的影响被消除。另外,由于接收窗记录的数据全是有效回波数据,存储数据冗余大部分被消除。PRF变化方案推导如下。
波束照射时间内的第n个发射脉冲被场景中心点目标(Rc,xc)散射后,再被接收机接收,这期间的距离历程为:
其中PRI(k)表示波束照射时间内的第k个PRI,m是发射和接收一个特定脉冲之间经历的脉冲个数,Δ∈(0,1)是距离延时中的小数部分。假设第n个脉冲是在方位时刻η处发射的,那么Rc(n)可以近似表示为:

为了消除RCM对距离向测绘带宽的影响,式(5)中的Δ和m应不随方位时间变化。联合式(5)和式(6)得PRI变化规律为:

如图1(a)所示,起始斜视角θs处的等效斜距最大,为Rccos(θs),因此需要最大的PRI(设为PRImax),式(7)可以重新写成:

为了确定PRI(n),均匀离散化初始的方位向时间,离散间隔为PRIm,PRIm为PRImax和PRImin(最小PRI)的均值,PRImin计算为:

更新后的方位时间为非均匀离散化的时间,离散间隔为PRI(n),其范围在PRImin和PRImax之间变化。这种变化规律下接收窗或盲区与瞬时斜视角的关系如图3所示。
3 成像处理方法
聚束式SAR中,一种快速有效的成像方法是两步式成像算法(TSA)[3]。两步式中的第1步为方位一致压缩,其在连续时间域为方位向信号与参考信号的卷积,在离散时间域由方位解斜、快速傅里叶变换(FFT)和残余相位补偿3部分实现。由于SAR是一种脉冲雷达,方位一致压缩只能在离散域实现,并且要求方位信号均匀采样。一种解决方案是对回波信号在方位向插值重采样后再进行两步式成像,然而,插值引入的误差会导致方位一致压缩失败,即多普勒频谱仍然混叠。
本节采用时域后向投影算法(BPA)[11,12]进行成像。该算法在时域完成,可以直接对非均匀采样信号进行处理。在传统的BPA算法中,方位数据为均匀采样数据,并且成像场景的网格间距小于方位分辨率vrBs即可。然而在大斜视聚束SAR中,斜视角造成的多普勒带宽很大,每个点目标的多普勒总带宽为Bsq+Bs。因此网格间距需要小于vr/(Bsq+Bs)。另外由于PRF的变化,记录的回波脉冲的第1个样本对应的距离延时会随着方位时间改变,所以需要修改传统的BPA来适应这种变化。BPA的处理流程如图4所示。存储的回波数据为:
其中R(n)为点目标到雷达平台的瞬时斜距,

距离压缩通过在距离频域乘以H1实现。

由于BP算法是对场景中的每一个点分别运算,首先需要确定成像场景网格。如前面所述,网格的间隔需要小于vr(Bsq+Bs)。对于网格上的任意一点(Ri,xj),首先找到其在回波数据上对应的距离历程曲线,再沿着这条曲线相干叠加便得到该点的成像结果。这个过程的数学表达式为:
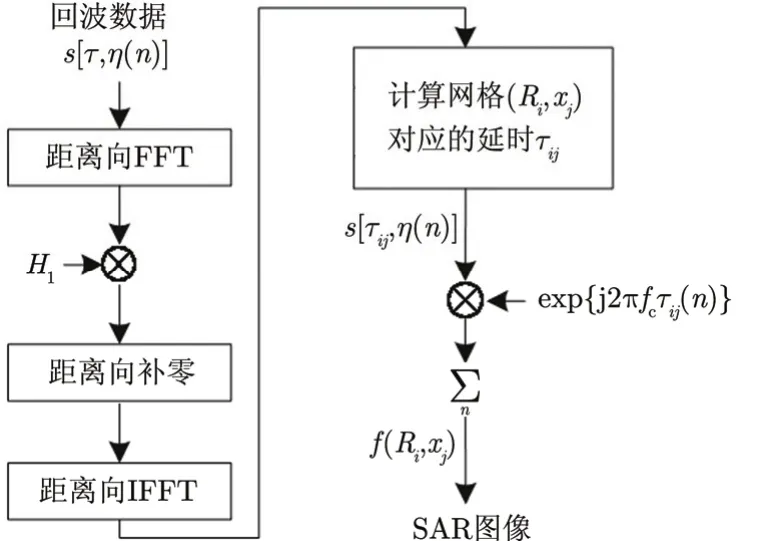
图4 BPA成像处理流程图Fig.4 The flowchart of BPA

其中
通常情况下τij(n)对应的值为非整数像素值,以其相邻像素来确定该点的距离历程曲线会有一定的误差。为了减小这种误差,可对回波数据插值或升采样。本文通过在距离频谱的两端补零来实现升采样。另外,在确定距离历程曲线时,需要考虑PRF的变化,τij(n)对应的距离向像素索引为:

其中Δτ为距离向升采样后的像素间隔。对网格中的每一点进行上述投影处理后,便能得到最终的SAR图像。
4 仿真结果及分析
本节将给出1维(方位向)仿真和2维仿真实验来验证这种SAR模式及其成像处理方法。方位向仿真参数如表1所示,其中斜视角为30°,分辨率为0.3 m。根据式(8)推导出的PRF变化方案,其中PRImax=1/2900s,θs可以根据表1和图1(a)中的几何关系计算得到,瞬时PRF与传感器方位位置的关系如图5(a)所示。对应的斑马图如图5(b)所示,其中黑色区域表示盲区,红色曲线表示场景中心点目标的距离历程,蓝色区域表示整个测绘带的距离历程。
4.11维仿真
本小节利用方位向的一维仿真来评价TSA和BPA的方位向成像性能。两种成像算法获得的方位向聚焦结果分别如图6(a)和图6(b)所示。可以看到,TSA聚焦后的方位向信号有很多成对回波,这是由插值误差造成的。而BPA聚焦后的方位向信号为一理想的sinc函数。因此在后面的2维仿真中,我们只给出BPA的成像结果。
4.22维仿真
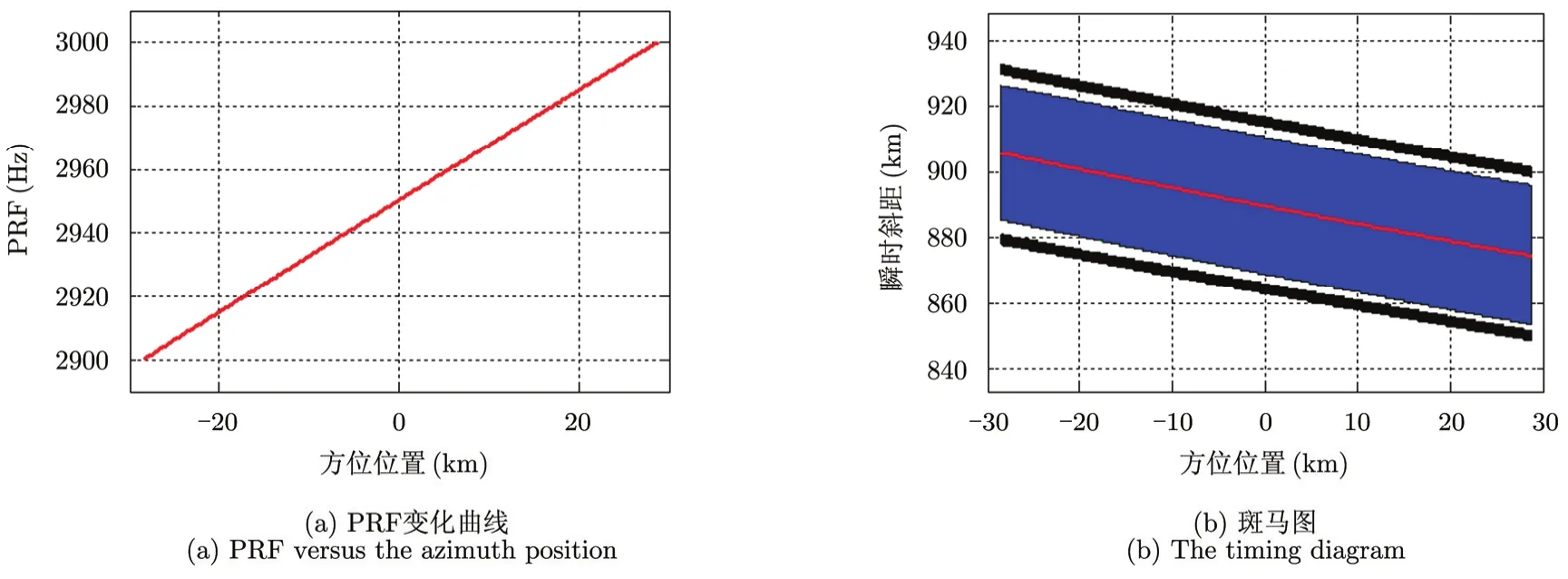
图5 PRF变化引起的盲区变化Fig.5 The variation of blind ranges caused by PRF variation

图6 方位向聚焦结果Fig.6 Focused results in azimuth
本小节通过2维仿真实验进一步验证BPA成像算法。除了表1中列出的方位向参数外,脉冲带宽设为500 MHz,式(3)中的Bf,Bsq和 Bs分别为2183 Hz,12602 Hz和24356 Hz。因此网格间隔设为vr/ [1.2(Bs+Bsq)],其中因数1.2为过采样率。
成像场景如图7所示,其中分布了5个点目标。图8(a)为PRF不变时成像场景对应的回波幅度图;图8(b)为PRF按照式(8)变化时成像场景对应的回波幅度图。从这两幅图可以看出,相同的数据存储空间或者相同的接收窗大小,PRF变化可以实现更宽的测绘带宽;或者实现相同的测绘带宽,PRF变化所需的数据存储空间更小。实际上所需的数据存储大小如图8(b)中红色矩形框所示。
图9给出了5个点目标最终的成像结果。为了进一步分析点目标的成像性能,点目标分析结果如表3所示。可以看出这种工作模式下采用BPA成像能获得较理想的聚焦结果。
为了说明网格间隔对成像的影响,网格间隔分别为vr(1.2Bs)(大于vr(Bsq+Bs))和vr/[1.2(Bs+ Bsq)]时聚焦后的点目标2维频谱幅度如图10所示,可以看到网格间隔小于vrBs但大于vr(Bsq+Bs)时,得到的2维频谱在方位向混叠。

图7 斜视聚束SAR的成像场景Fig.7 The designed imaged scene for squint spotlight SAR
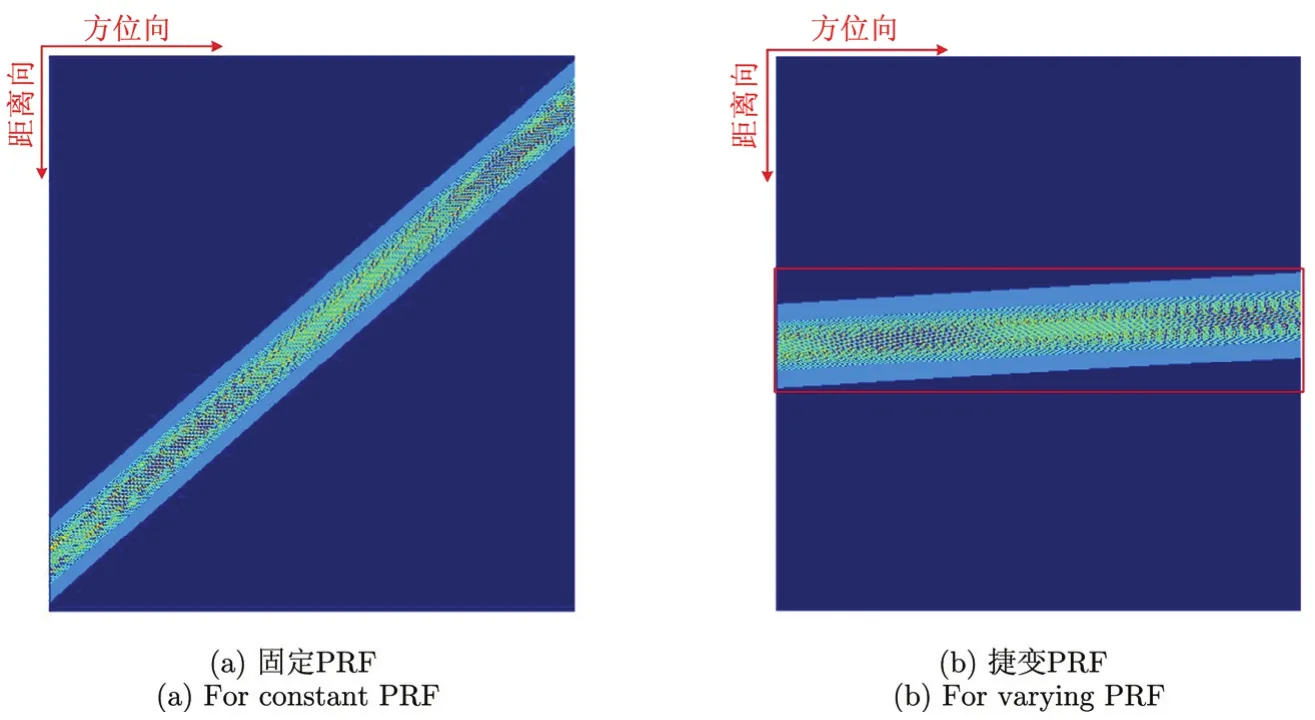
图8 存储的回波数据幅度Fig.8 Amplitude of the stored echo data
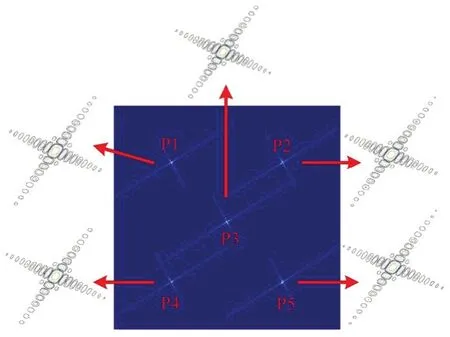
图9 PRF变化时的点目标成像结果Fig.9 Imaging results for varying PRF

表3 点目标性能分析Tab.3 Performance analysis of point targets
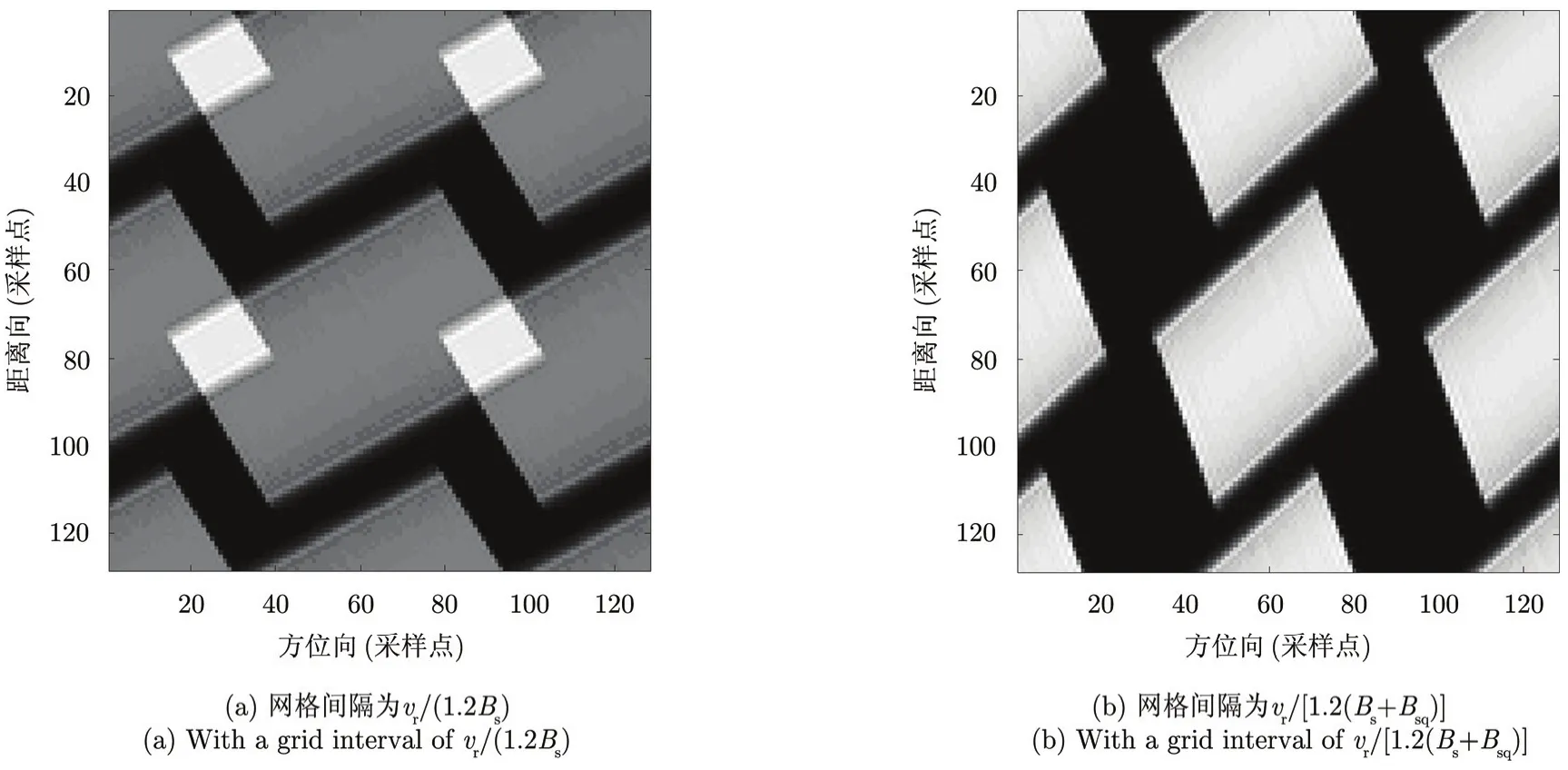
图10 聚焦后点目标P3的2维频谱幅度Fig.10 2D spectra for the point target analysis of P3
5 结论
本文介绍了一种新型的聚束SAR模式,该模式的系统PRF根据一个特定的方案连续变化,以消除RCM对距离向测绘带宽和数据存储大小的影响。本文还研究了这种模式对应的成像方案。由于频域成像算法在方位向数据非均匀采样时不再有效,本文提出了一种改进的时域后向投影算法(BPA)来获得最后的雷达图像。然而,BPA在对大成像场景成像时效率较低。目前国内外提出了很多快速BPA,这些快速算法经过适当的修改,也可以应用于本文所述的成像模式中。
[1]Cumming I G and Wong F H.Digital Processing of Synthetic Aperture Radar Data:Algorithms and Implementation[M].Norwood,MA,USA:Artech House,2005.
[2]Carrara W G,Goodman R S,and Majewski R M.Spotlight Synthetic Aperture Radar—Signal Processing and Algorithms[M].Boston,MA,USA:Artech House,1995.
[3]Lanari R,Tesauro M,Sansosti E,et al..Spotlight SAR data focusing based on a two-step processing approach[J].IEEE Transactions on Geoscience and Remote Sensing,2001,39(9):1993-2004.
[4]Xu W,Deng Y,Huang P,et al..Full-aperture SAR data focusing in the spaceborne squinted sliding-spotlight mode[J].IEEE Transactions on Geoscience and Remote Sensing,2014,52(8):4596-4607.
[5]Naftaly U and Nathansohn R L.Overview of the TECSAR satellite hardware and Mosaic mode[J].IEEE Geoscience and Remote Sensing Letters,2008,5(3):423-426.
[6]Zhang Y,Yu Z,and Li C.Effects of PRF variation on spaceborne SAR imaging[C].IEEE International Geoscience and Remote Sensing Symposium,Melbourne,VIC,Australia,2013:1336-1339.
[7]Gebert N and Krieger G.Ultra-wide swath SAR imaging with continuous PRF variation[C].EUSAR,Aachen,Germany,2010:966-969.
[8]Villano M,Krieger G,and Moreira A.Staggered SAR:highresolution wide-swath imaging by continuous PRI variation[J].IEEE Transactions on Geoscience and Remote Sensing,2014,52(7):4462-4479.
[9]Luo X,Wang R,Xu W,et al..Modification of multichannel reconstruction algorithm on the SAR with linear variation of PRI[J].IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing,2014,7(7):3050-3059.
[10]Yen J L.On nonuniform sampling of bandwidth-limited signals[J].IRE Transactions on Circuit Theory,1956,3(4):251-257.
[11]Munson D C Jr.,O'Brien J D,and Jenkins W K.A tomographic formulation of spotlight-mode synthetic aperture radar[J].Proceedings of the IEEE,1983,71(8):917-925.
[12]Soumerk M.Synthetic Aperture Radar Signal Processing with Matlab Algorithms[M].New York,MA,USA:A Wiley-Interscience Publication,1999.

罗绣莲(1987-),女,四川广安人,博士研究生,研究方向为高分宽幅合成孔径雷达信号处理。
徐伟(1984-),副研究员,研究方向为新体制合成孔径雷达系统设计及信号处理。
郭磊(1988-),博士研究生,研究方向为高分宽幅星载合成孔径雷达系统设计。
The Application of PRF Variation to Squint Spotlight SAR
Luo Xiu-lian①②Xu Wei①Guo Lei①②
①(Institute of Electronics,Chinese Academy of Science,Beijing 100190,China)
②(University of Chinese Academy of Science,Beijing 100039,China)
This paper focuses on a novel squint spotlight SAR mode,where the PRI variation is employed to increase the range swath width,especially for high-resolution imaging.The spotlight SAR is developed to increase the azimuth resolution via steering the antenna beam to always illuminate the same area on the ground during the whole data acquisition interval.However,requirement of high resolution and large squint angle leads to large Range Cell Migration(RCM).Therefore,to ensure the scattered echoes along the azimuth to be completely received within the fixed reception window,the range swath has to be much narrower than the reception window.In order to increase the range swath,we can change the PRI along the azimuth to shift the reception window according to the variation of instantaneous slant range.This paper first derives the PRI variation scheme.Afterward,a modified time-domain Back-Projection Algorithm(BPA)is presented to implement the focusing.Finally,simulation results are given to validate the presented SAR mode and corresponding imaging processor.
Synthetic Aperture Radar(SAR); Squint spotlight; High-resolution; PRF variation; Back-Projection Algorithm(BPA)
TN958
A
2095-283X(2015)01-0070-08
10.12000/JR14149
罗绣莲,徐伟,郭磊.捷变PRF技术在斜视聚束SAR中的应用[J].雷达学报,2015,4(1):70-77.http://dx.doi.org/10.12000/JR14149.
Reference format:Luo Xiu-lian,Xu Wei,and Guo Lei.The application of PRF variation to squint spotlight SAR[J].Journal of Radars,2015,4(1):70-77.http://dx.doi.org/10.12000/JR14149.
2014-12-05收到,2015-03-19改回
自然科学基金青年基金(61401431)资助课题
罗绣莲xiaoluo6070@126.com
