基于分段控制多级缸举升系统研究
2015-10-29张春辉赵静一荣晓瑜
张春辉 赵静一 荣晓瑜 布 丹
1.燕山大学河北省重型机械流体动力传输与控制重点实验室,河北秦皇岛,0660042.燕山大学先进锻压成形技术与科学教育部重点实验室,河北秦皇岛,066004
基于分段控制多级缸举升系统研究
张春辉1,2赵静一1,2荣晓瑜1,2布丹1,2
1.燕山大学河北省重型机械流体动力传输与控制重点实验室,河北秦皇岛,0660042.燕山大学先进锻压成形技术与科学教育部重点实验室,河北秦皇岛,066004
针对某矿用自卸车多级缸举升换级时的冲击振动问题,研究了举升过程中的参数关系;根据举升系统电液比例控制方案提出了负载敏感举升系统分段控制方法,对举升缸换级时的模糊控制算法进行分析。仿真分析表明,分段控制较单一的电液比例控制能有效改善多级缸换级时的冲击问题。现场试验证明,该举升系统有效解决了变负载和参数时变系统的控制稳定性问题。研究结果为分析同类问题提供借鉴与参考。
多级缸;冲击;电液比例; 分段控制;模糊控制
0 引言
含有多个活塞杆的多级液压缸由于具有结构紧凑,以及在原始长度相同的情况下比单级缸行程更长的特点而被广泛应用于自卸车的举升系统[1]。而在各级活塞杆依次伸出的过程中,由于活塞杆截面和负载的变化,以及需要通过活塞杆相互碰撞实现限位的情况,使得系统产生过大的冲击,该冲击通过整车车架车身传导到驾驶室,使得即便有减震装置的驾驶室也会产生极大的振动,从而影响驾驶人员的乘坐舒适性及安全。因此,如何克服这些问题成为自卸车举升系统以及和多级缸相关的大型机械装置亟待解决的问题。在变负载系统中,可以通过检测负载压力变化信号,向液压系统进行反馈,实现节能控制,以及流量和调速控制[2]。
目前国内外的研究主要集中在以下几个方面:在常规PID控制的基础上,引入了自适应神经元对PID控制参数进行在线调整,实现了对多级缸系统运动过程的智能控制[3];以机动导弹发射架为例,研究了大型液压驱动机械装置起竖过程的控制问题,实现了对液压油源和起竖速度的灵活控制[4];建立二级缸举升系统的模型,并进行仿真研究以及改进的PID控制算法的研究[5-6]。以上研究成果为多级缸举升系统的研究奠定了一定的基础,但无法满足矿用自卸车举升系统的要求。本文根据矿用自卸车应用工况,在力求系统节能、安全、可靠的前提下,提出了负载敏感电液比例举升控制系统方案,并通过分段控制方法即在多级缸正常伸出时采用电比例控制,在换级角度±5°范围内对举升过程采用模糊控制算法进行计算,并通过仿真分析及现场试验进行验证,从而证明了分段控制较采用单一电液比例控制的优越性。
1 举升过程参数分析
矿用自卸车举升系统主要由车厢、多级举升缸及车架组成,其结构如图1所示,液压系统通过多级液压油缸为车厢提供动力,实现车厢从水平状态到最大角度状态的运动。
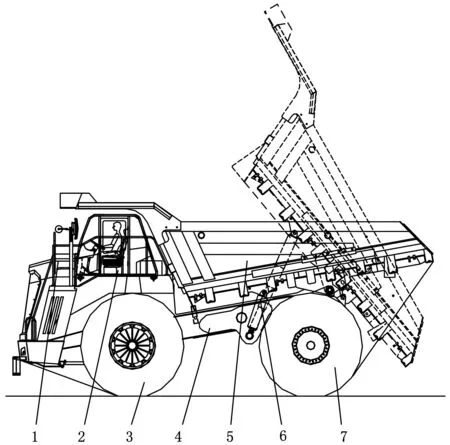
1.车身 2.驾驶室 3.前轮总成 4.车架 5.车厢 6.多级举升缸 7.后轮总成图1 矿用自卸车举升系统结构图
举升机构的简化形式如图2所示,其中O点为举升缸与车架的铰接点,A点为举升缸与车厢相连的回转中心,B点为车厢与车架的铰接点,C点为举升缸伸出使车厢绕回转中心旋转θ后的位置,车厢与OB的夹角为φ,多级缸伸出时的长度为l+x,其中l为举升缸安装长度,x为多级缸行程,根据几何关系可以得到举升角度与举升缸行程变化之间的关系:
对于△OBC,有
(1)

图2 举升机构简图
对于△OAB,有
(2)
由式(1)、式(2)可得
(3)
将该车型举升机构的参数代入式(3),可以得到图3所示的举升角度与举升缸行程变化关系曲线,从图中可以看出举升缸换级时所对应的举升角度,从而为后续的举升控制研究提供依据。

图3 举升角度与举升缸行程变化关系曲线
2 基于负载敏感电液比例控制方案
由于在举升过程中车厢中的载荷随着举升角度的变化而不断变化,同时还要受到风载荷等随机载荷变化的影响,因此举升缸的受力是不断变化的,采用负载敏感控制即与负载无关的流量控制,使举升缸的运动速度在每一级内运动时不受负载的影响。

1.负载敏感变量泵 2.过滤器 3.蓄能器 4.多级举升缸 5.安全阀图4 举升液压系统原理图
图4为举升液压系统原理简化图,该系统由负载敏感变量泵、电液比例举升控制回路组成。其中,CT1、CT2为比例压力阀,CT3、CT9为梭阀,CT4为压力顺序阀,CT5~CT8为平衡型常闭逻辑阀,CT10为溢流阀,CT11为单向阀,CT12为电磁换向阀。当比例电磁铁1AO获得控制手柄发出的PWM信号后控制比例压力阀CT1的阀芯开口度,蓄能器3的压力油通过CT1后控制平衡型常闭逻辑阀CT6与CT8的先导腔,从而使变量泵的液压油通过逻辑阀CT6进入多级缸的大腔,而小腔的液压油通过CT8回油箱,实现车厢的举升。同样,当比例电磁铁2AO获得手柄发出的PWM信号后,变量泵的压力油通过平衡型常闭逻辑阀CT5进入多级缸的小腔,而大腔的压力油通过CT8回油箱,实现车厢的下降。平衡型常闭逻辑阀具有比例换向功能和双向平衡功能,从而使车箱控制更为可靠和舒适,消除了车箱下降末端对底盘的冲击,同时能够平衡车箱在举升末端物料流动反冲加速货箱的后翻。
当车厢举升或下降时,通过举升手柄来实现举升或下降功能及调节举升速度,这里称之为手柄控制,其实质为将控制手柄的角度信号转化为电比例信号以驱动比例压力阀CT1和CT2换向,图5所示为举升手柄摆角与输出流量之间的关系。当多级举升缸需要换级时,由于驾驶员无法判断换级的具体位置,无法对多级缸换级进行控制,而换级时由于截面的变化,负载的变化以及活塞杆之间的相互碰撞实现限位而产生过大的冲击,因此为了降低冲击对整车的影响现采用分段控制方式,其控制流程如图6所示。
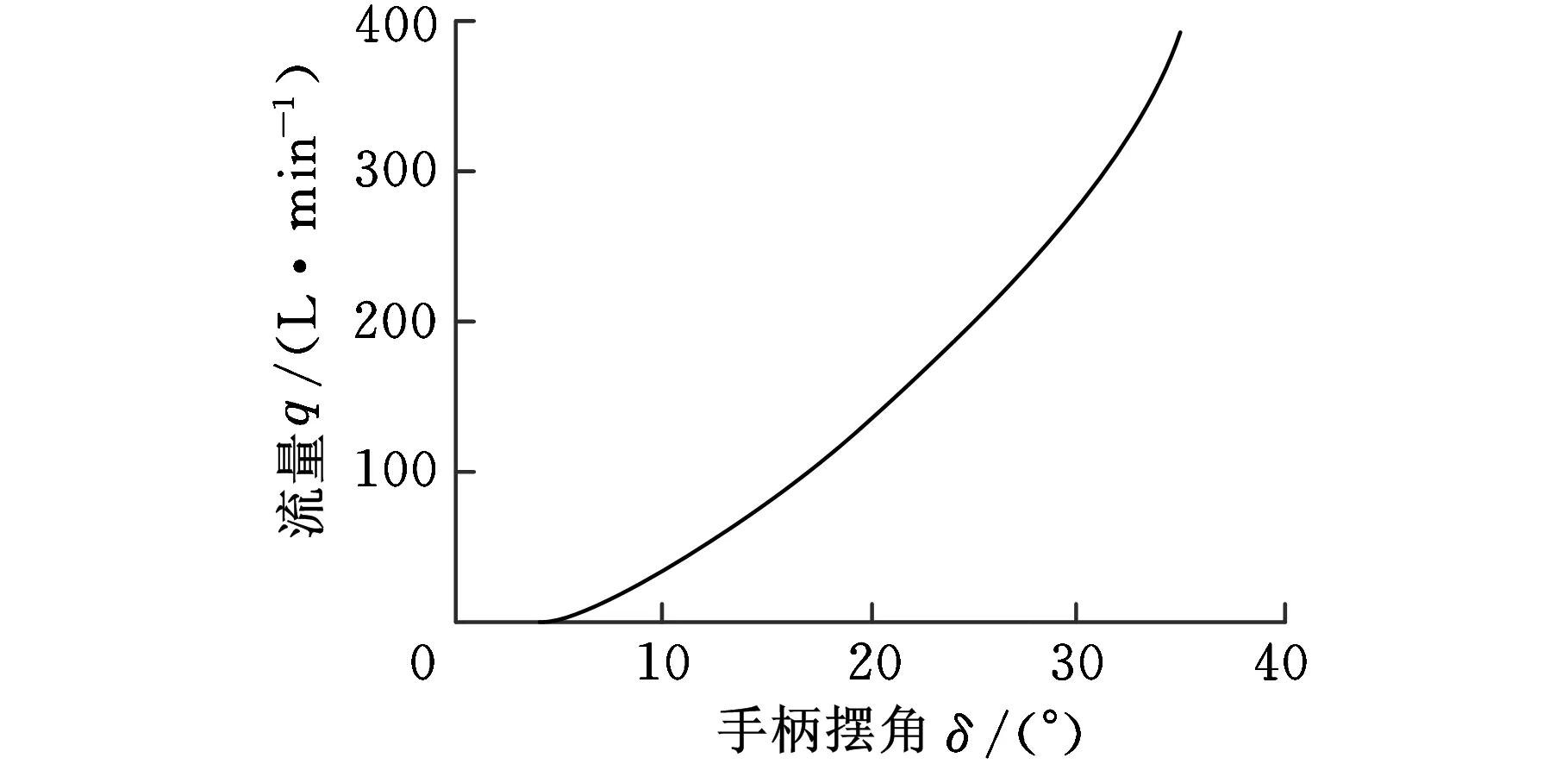
图5 手柄控制特性曲线
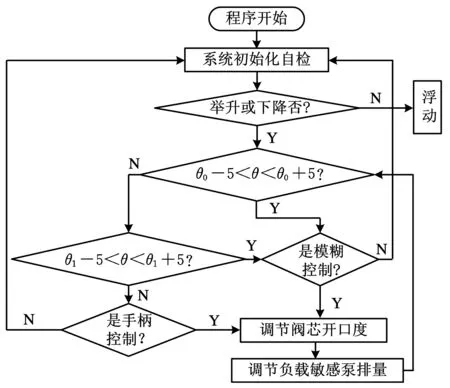
图6 举升控制流程图
通过安装在车厢上的角位移传感器实时检测举升的角度θ,按照多级缸级间转换的次数将举升过程划分成若干阶段,由于一级缸伸出时,负载及截面的变化并不明显,因此忽略一级缸伸出时的作用,将一级缸到二级缸,二级缸到三级缸过渡的角度值θ0、θ1设为控制点,根据上文对举升缸长度变化和举升角度的变化关系的分析确定两个控制点的角度值,当通过角度传感器采集到的举升角度在这两个角度控制点±5°范围内时,通过模糊控制算法控制比例阀阀芯的位移。
3 模糊控制算法设计
当车厢举升或下降时,通过举升角度传感器采集当前的举升角度信号,当举升角度在(θ0-5°,θ0+5°)或(θ1-5°,θ1+5°)内时,手柄工作失效,进入分段控制模式,通过模糊控制算法,计算出主阀芯的开口度,通过控制比例压力阀实现主阀芯开口度的调节,从而达到抑制举升缸换级时的速度突变。模糊控制系统的原理如图7所示。

图7 模糊控制系统原理图

建立举升液压系统的AMESim模型,并进行编译转化为Simulink中常用的S函数形式,实现与Simulink的联合,再利用Simulink中的fuzzy工具箱中的模糊控制器(fuzzy logic controller)和其他模块搭建系统的仿真模型,如图8所示,其中AMESim模型中将控制比例减压阀的电压信号作为输入信号,举升角度作为输出信号。手柄控制方式和分段控制方式下的仿真结果如图9所示。

表1 模糊控制规则
从图9可以看出,在举升过程中第8 s和第15 s也就是在二级缸和三级缸换级时,多级缸的速度发生显著的波动,两种控制方式差异也是主要发生在二级缸和三级缸换级时,分段控制方式下采用模糊控制算法后的系统稳定性增强,多级缸换级时的振动冲击作用将会明显减弱。

图8 分段控制仿真模型
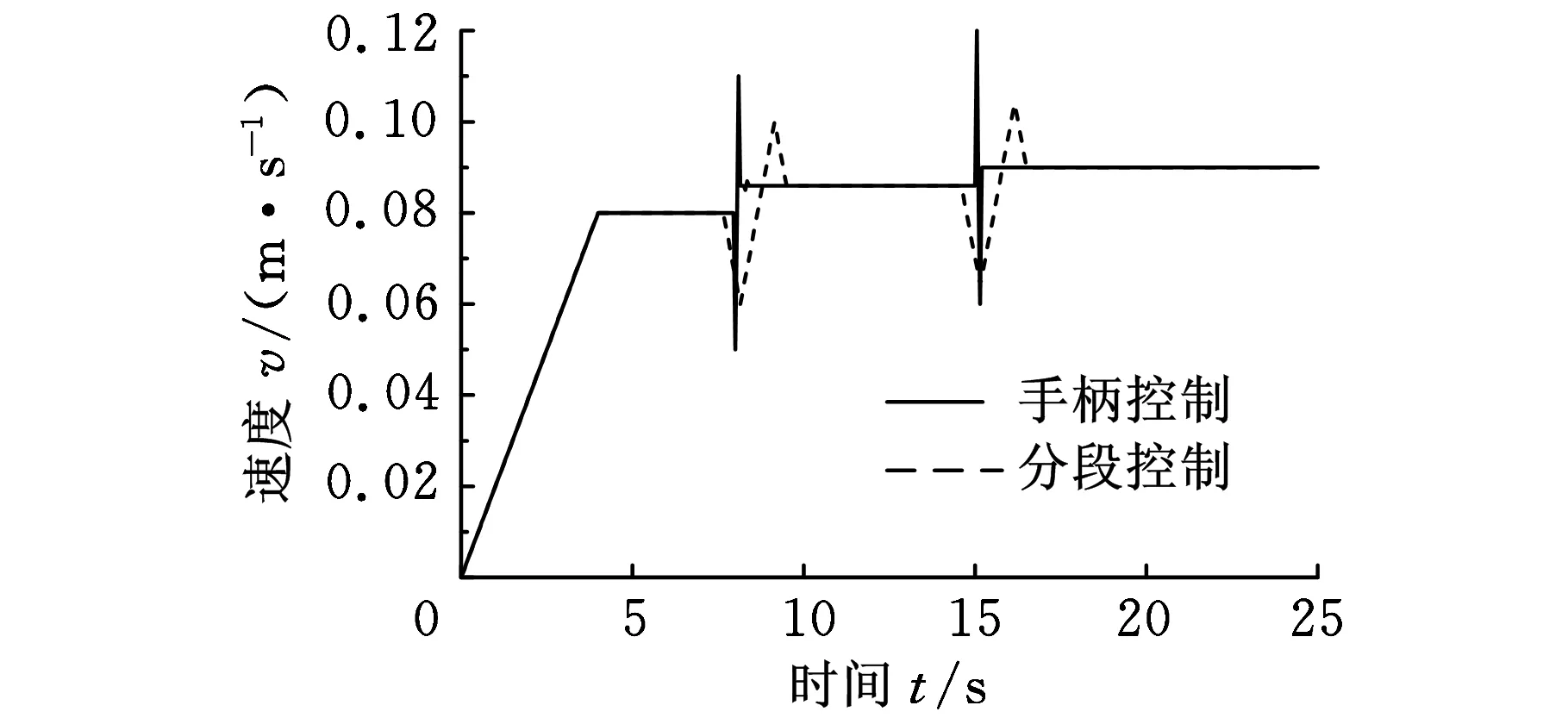
图9 两种控制方式下举升缸运行速度
4 现场试验验证
为了验证采用分段控制后对系统产生的效果以及仿真分析的正确性,对现场实车进行测试,在实验测试过程中,通过液压测试仪采集举升缸大腔的压力值,并通过液压测试仪屏幕或通过PC联机软件可以显示各类分析曲线[10],如图10所示。

图10 数据采集流程图
对空载及重载举升过程中压力信号进行采集与对比分析,图11所示为多次空载举升中任意两次压力曲线,从图中可以看出,在整个举升过程中采用手柄控制即电比例控制时,在二级缸和三级缸伸出时均会产生较大的压力峰值,说明多级缸伸出时的冲击主要发生在二级缸和三级缸换级前后,与仿真分析结果相一致,而采用分段控制即换级前后采用模糊控制算法虽然会使举升时间滞后,但仍然在举升设计时间允许的范围内,并且能有效地缓解了换级时的压力冲击,使举升过程中更加平稳。

图11 空载实测压力对比
重载举升时由于惯性作用,启动时的压力会比空载时要大很多,为了使落料更加平稳需要放慢举升速度,随着举升过程的进行,多级缸活塞杆逐级伸出,在二级缸和三级缸伸出时仍然会有冲击作用。图12所示为重载情况下两种控制方式下举升压力测试曲线。通过对比可以发现,在每一级缸伸出的过程中,两种控制方式效果相似,而在换级时能够显示出分段控制方式对于抑制冲击的效果。

图12 重载实测压力对比
5 结论
(1)通过对举升机构的模型简化,分析了举升过程中举升缸的长度变化和举升角度关系,为得到多级缸换级时的举升角度提供依据。
(2)对负载敏感举升系统电液比例控制原理进行了分析,并提出了分段控制方式即换级前采用手柄控制,在二级缸、三级缸换级角度±5°范围内采用模糊控制算法。
(3)对模糊控制算法进行设计,并进行仿真研究,表明分段控制方式下采用模糊控制算法后的系统稳定性增强,多级缸换级时的冲击作用将会明显减弱。
(4)通过现场试验对两种控制方式即通过手柄实现比例控制和分段控制下的空载和重载举升过程中的压力信号进行对比,验证了仿真分析的正确性,比较了两种控制方式下的控制效果,为多级缸相关的大型装置的设计和研究提供参考。
[1]Scholz F G, Bucci S J, Hoffmann W A, et al. Hydraulic Lift in a Neotropical Savanna: Experimental Manipulation and Model Simulations[J]. Agricultural and Forest Meteorology, 2010, 150: 629-639.
[2]王智勇,赵静一,张齐生.负荷传感技术在重型平板车液压控制系统上的应用[J]. 中国工程机械学报,2005, 3(4):435-438.
Wang Zhiyong, Zhao Jingyi, Zhang Qisheng. Application of Load Sensing Technology in the Hydraulic Control System of Heavy Duty Transporter[J]. Chinese Journal of Construction Machinery,2005, 3(4):435-438.
[3]高钦和, 黄先祥, 王孙安. 含多级油缸的液压举升系统智能PID控制研究[J]. 中国机械工程,2007, 18(6):56-58.
Gao Qinhe, Huang Xianxiang, Wang Sunan.Study on Intelligent PID Control of Hydraulically Driven Ljft System with Multistage Hydraulic Cylinder[J]. China Mechanical Engineering,2007, 18(6):56-58.
[4]高钦和.大型装置起竖过程的电液比例控制研究[J]. 机械工程学报,2004,40(2):189-192.
Gao Qinhe. Study on Electrohydraulic Proportion Control in Large-sized Mechanism Erecting Process[J].Chinese Journal of Mechanical Engineering,2007, 18(6):56-58.
[5]任建华,谢建,张磊. 含二级液压缸举升系统的改进PID控制算法研究[J]. 液压气动与密封, 2013(2):50-52.
Ren Jianhua, Xie Jian, Zhang Lei. Research of Improved PID Control Algorithm for Driven Lift System with Two Stage Hydraulic Cylinder[J]. Hydraulics Pneumatics & Seals, 2013(2):50-52.
[6]任建华,谢建,李良,等. 基于Simulink的含二级液压缸的举升系统仿真研究[J]. 机床与液压, 2013,41(9):160-162.
Ren Jianhua, XieJian, Li Liang, et al. Simulation Analysis for Driven Lift System with Two Stage Hydraulic Cylinder Based on Simulink[J]. Macnhine Tools & Hydraulics, 2013,41(9): 160-162.
[7]邓飙,张磊,任建华,等. 基于变频液压技术的多级缸起竖系统仿真研究[J]. 机床与液压,2013, 41(13):147-150 .
Deng Biao, Zhang Lei, Ren Jianhua, et al. Simulation Study of Erecting Hydraulic System of Telescopic Multistage Cylinder Based on Variable Frequency Technology[J].Macnhine Tools & Hydraulics,2013,41(13) :147-150.
[8]罗治军,谢建,田桂 ,等. 多级液压缸变负载同步控制研究[J]. 流体传动与控制, 2009(6):16-19.
Luo Zhijun, Xie Jian, Tian Gui, et al. Research on Variable Load Synchronization Control of Multi-stage Cylinder[J]. Fluid Power Transmission and Control,2009(6):16-19.
[9]赵晓东,赵静一.模糊思维与广义设计—理论和模型及其应用[M].北京:机械工业出版社, 1998.
[10]郭锐,唱荣蕾,赵静一,等. 液压制动系统蓄能器充液特性研究[J]. 农业机械学报,2014, 45(7):7-12.
Guo Rui, Chang Ronglei, ZhaoJingyi, et al. Research on Accumulator Charging Characteristics of Hydraulic Brake System[J].Transactions of the Chinese Society of Agricultural Machinery,2014,45(7):7-12.
(编辑郭伟)
Research on Multi-stage Cylinder Lifting System Based on Subsection Control
Zhang Chunhui1,2Zhao Jingyi1,2Rong Xiaoyu1,2Bu Dan1,2
1.Hebei Provincial Key Laboratory of Heavy Machinery Fluid Power Transmission and Control,Yanshan University,Qinhuangdao,Hebei,066004 2.Key Laboratory of Advanced Forging & Stamping Technology and Science,Yanshan University,Qinhuangdao,Hebei,066004
Aimed at the lifting tipper impact problems of changing stage of multistage cylinder in mining dump truck, the parameter relationship was studied in the lifting process. A subsection control scheme of load sensitive lifting system was proposed based on electric-hydraulic proportional control. The fuzzy control algorithm was analyzed during changing stage of the cylinder. Simulation analysis shows that the subsection control can improve changing stage impact problem of the multistage cylinder compared with electric-hydraulic proportional control. Through the field test, it is proved that the lifting system solves the control stability of the variable load and parameter time-varying systems effectively,providing reference to analyze the same problem.
multistage cylinder; impact; electric-hydraulic proportional; subsection control; fuzzy control
2014-07-22
国家自然科学基金资助项目(51175448,51405424);河北省自然科学基金资助项目(E2012203071)
TH137;TP273< class="emphasis_italic">DOI
:10.3969/j.issn.1004-132X.2015.03.007
张春辉,男,1985年生。燕山大学机械工程学院博士研究生。主要研究为电液控制系统。赵静一,男,1957年生。燕山大学机械工程学院教授、博士研究生导师。荣晓瑜,男,1990年生。燕山大学机械工程学院硕士研究生。布丹,女,1990年生。燕山大学机械工程学院硕士研究生。