木瓜采摘机的研制
2015-10-28柏滋艺张燕
柏滋艺++张燕


摘要:为了解决对不同成熟度木瓜的采摘问题,设计了一种基于RGB色彩传感器对木瓜成熟度判断的 并进行自动化采摘的控制系统。结果表明,该系统利用RGB色彩传感器对木瓜颜色进行鉴定,通过检测输出控制电机的运动进而控制采摘机对木瓜的采摘。这种采摘系统不仅可以快速、有效地采摘木瓜,而且还可以实现只对成熟度达标的木瓜进行采摘。
关键词:木瓜;采摘机;成熟度;RGB色彩传感器;电机驱动
中图分类号:TP242.6;S661.6 文献标识码:A 文章编号:0439-8114(2015)16-4049-03
DOI:10.14088/j.cnki.issn0439-8114.2015.16.056
Research on Picking Machine of Papaya
BAI Zi-yi, ZHANG Yan
(College of Mechanical and Electrical Engineering, Hainan University,Haikou 570228,China)
Abstract: In order to solve the problem of picking on different maturity papaya, a kind of based on RGB color sensor of papaya maturity of judgment and automation control system was designed. The results showed that the design used the RGB color sensor to identify papaya colors, by detecting the output to control the movement of the motor and control picking agencies gathering of papaya. The picking system not only could pick the papaya quickly and effectively, but also can realize only for picking standard maturity papaya.
Key words: papaya; picking machine; maturity;RGB color sensor; motor drive
木瓜是中国热带水果主产品之一,木瓜的主要出产地在台湾和海南,其中以海南生产的木瓜质量最为优质。迄今为止,木瓜的种植面积已超过1 133 hm2,年总产值达1.8亿元以上。木瓜因其果肉厚实鲜美、香甜美味、营养丰富,有“百益之果”、“万寿果”之美称,是岭南四大水果之一。木瓜富含17种以上氨基酸及钙、铁等微量元素,还含有番木瓜碱和木瓜蛋白酶等,不仅对人体有健脾消食的作用,还可以达到美容养颜的效果。因此,木瓜受到越来越多人的青睐。
目前中国木瓜产业发展迅速,但是有相当一部分产区还处于人工作业阶段。这种劳力作业工作环境较为简陋,安全性不高,会造成大量劳动力的浪费。因此,研究水果的成熟度鉴别以及自动采摘技术有着非常重要的意义。本研究设计了一种具有木瓜成熟度检测功能的采摘机对木瓜进行采摘,通过改变参数也可以用于对芒果等其他作物进行采摘。
1 总体设计与受力分析
1.1 采摘结构设计
木瓜采摘机主要包括切割刀片、电动机、夹持器和执行器外壳等。夹持器分为两段,分别位于执行器外壳的外部和内部,在执行器外壳内部设有夹持器驱动器,用来指挥夹持器动作,夹紧或张开,其主体结构如图1所示。夹持器是用来夹紧或释放果实和果梗,夹持器内侧与果实相接触,所以在其内侧要有弹性胶层。这样不仅可以增大夹持器与木瓜的摩擦力,而且弹性胶层可以防止木瓜受到创伤,从而提高了夹持的稳定性和可靠性[1]。
1.2 木瓜采摘受力分析
如图2所示,假定夹紧木瓜时,夹持器所受反作用力为F2,摩擦力为f,摩擦因数为μ,木瓜重量为G。F2=2 f2cosα(f2为果实对夹持器的反作用力),当F2大于2G/4μ cosα时,可以夹紧木瓜。一般α选择范围为28°~45°,摩擦因数为0.4~0.6。不同重力、不同摩擦因数、不同角度木瓜所需要的作用力如表1所示。
2 传感器测试与原理
在较为经济、准确的测量色彩的传感器中,选择了RGB色彩传感器,如图3所示。其测量方法分为两大类:测光方法和色度分析法。测光方法是使用各种传感器,在大量窄波长范围内测量色彩,然后对得到的数据进行积分处理计算三重刺激值X、Y、Y。色度分析法是使用3个滤波器的传感器测量来自物体的光,传感器廓线经过优化,输出三重刺激值。在这里通过检测木瓜果皮的颜色对其成熟度进行判定,选用色度分析法[2-4]。色彩传感器首先对木瓜颜色进行采样,传感器实现光到光电流的转换;其次因为原始光电流的幅值很小,所以必须进行放大环节;最后将放大后的模拟电压进行输出,进入下一环节用单片机控制电机动作。
3 采摘流程设计图
对成熟的木瓜进行自动化采摘是需要各个模块共同协作完成的,首先启动电源通过传感器的检测判断木瓜是否成熟,满足要求后录入程序的单片机进行控制电动机从而驱动夹持器驱动器进行采摘动作[5],具体流程如图4所示。
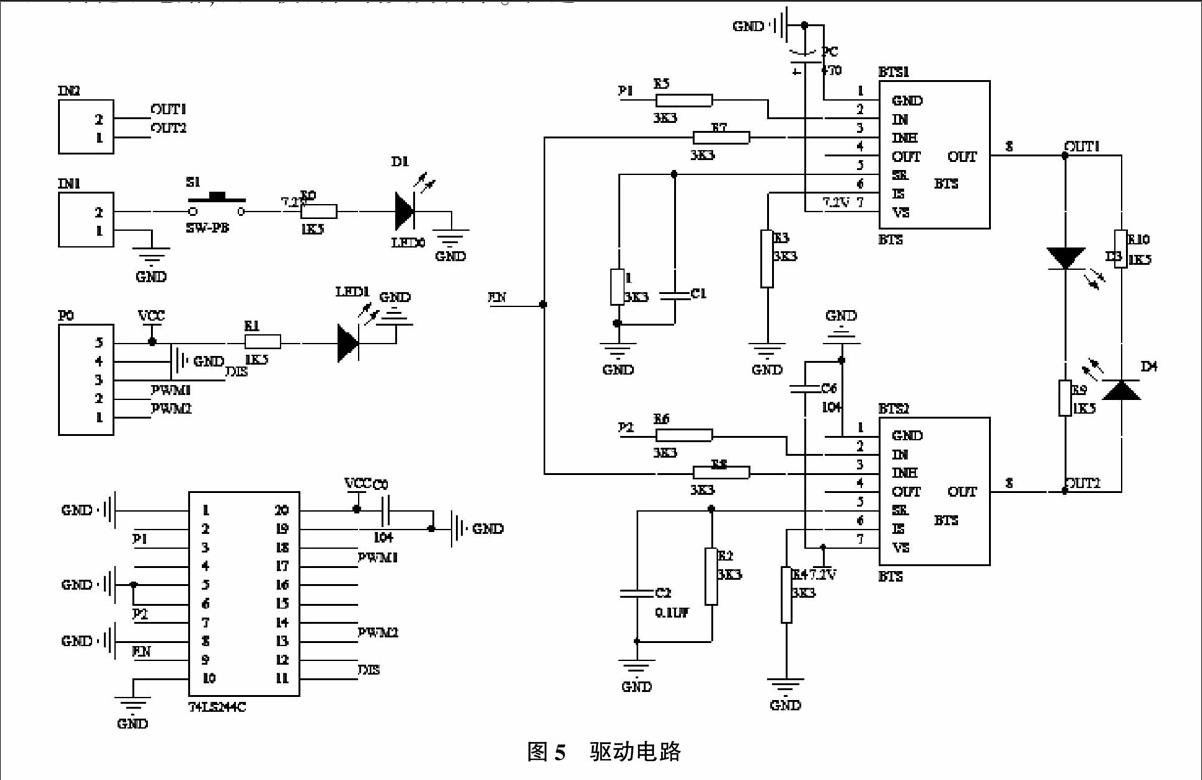
4 电机驱动控制系统
单片机控制系统在现代化控制领域中的优势日益增大,因其体积小,集成度高等特点受到青睐。而单片机的电机驱动所能输出电压过小,可能不足以使电机工作,该系统采用BTN电桥驱动对电路进行驱动控制[6]。该系统可以通过接受传感器传来的信号进行分析,然后对电机进行驱动,采摘机开始工作。当输出电压达到一定值时,电动机开始正转,采摘活动进行;当输出电压较低时,电机不工作。BTN驱动内含电流检测电路、控制驱动电路,不仅可以简化了电路,而且使得控制更为简单。在过温、过压、过流等电路情况下,芯片会自动停止工作,而且内部具有散热和稳压等作用。驱动电路如图5所示。
5 数据分析
为了研究该系统的合理性,选取了90个不同成熟度的木瓜进行试验,所得试验结果如下表2所示。对成熟的木瓜进行采摘时,其准确操作率可以达到93%以上。而对于半成熟木瓜采摘时考虑到输送、储存等问题,其准确操作率和误操作率没有造成很大的影响,而对于未成熟木瓜采摘时,其误操作率趋近于0,提高了设计的准确性。
6 小结
通过设计机械采摘机与鉴别成熟度的传感器配合使用,由驱动电路控制机械部件进行操作,高效稳定地实现了对木瓜的采摘,克服了由果树高大以及树梗过硬带来的不便操作。这种做法不仅提高了果农的劳动效率和经济效益,而且减少了木瓜的损伤率以及收获时间。随着自动化技术的发展,新型自动化机的优越性逐渐体现,该设计还可以通过设定传感器的不同输入用于其他水果的采摘,从而实现该设计的广泛使用。
参考文献:
[1] 叶 敏,邹湘军,蔡沛锋,等.水果采摘机器人通用夹持机构设计[J].农业机械学报,2011(S1):177-180.
[2] 魏海峰. 果实采摘机器人快速柔顺夹持测试系统设计[J].中国农机化,2011(3):87-89.
[3] 谈建豪,陈 燕,向和平,等.机器人串果采摘末端执行器设计及仿真[J].农机化研究,2013(9):133-136.
[4] 丁加军,刘桂芝,杨文亮.一种果实采摘末端执行器设计与仿真分析[J].农机化研究,2013(1):112-115.
[5] 杨冬进,张 燕.基于单片机控制的自动苹果采摘机设计[J].农机化研究,2015(2):28-31.
[6] 刘贵如,王陆林.BTN7970在直流电机驱动系统中的应用[J].单片机与嵌入式系统应用,2010(8):44-46.endprint
