双模式机电复合传动功率分配策略优化
2015-10-28郑海亮项昌乐韩立金张东好
郑海亮 项昌乐 韩立金 张东好
北京理工大学,北京,100081
双模式机电复合传动功率分配策略优化
郑海亮项昌乐韩立金张东好
北京理工大学,北京,100081
针对双模式机电复合传动系统,运用最小值原理对系统的功率分配进行优化控制策略的研究。在保证系统电池荷电状态平衡的前提下,以燃油消耗最少为优化目标,并基于所设计的优化求解流程和建立的系统数学模型,确定最优的系统工作状态。仿真结果表明,基于最小值原理的优化控制策略能够改善机电复合传动系统的燃油经济性。研究结果可为系统实时优化控制策略的制定提供依据。
双模式机电复合传动;功率分配;最小值原理;优化控制策略
0 引言
车辆机电复合传动系统是混联式混合动力传动的一种形式[1-4],它通过调节系统内部电机的工作状态来实现传动系统输出转速的连续变化,因此又被称为电力机械无级变速器(EVT)。机电复合传动系统存在发动机和电机等多个动力部件,能否均衡协调地控制各个动力部件间的功率分配是系统节能潜力发挥的关键,其控制效果直接决定了机电复合传动系统的综合性能。目前机电复合传动系统功率分配控制策略主要有两大类:基于规则的方法和基于优化的方法[5]。基于规则的控制策略是目前常用的实时控制方法,但由于该方法一般基于经验对系统的控制策略进行设计,所以控制的效果较差,系统的潜力难以充分发挥。基于优化的控制策略有很多方法,如动态规划方法、遗传算法等,通过求解优化模型来得到各部件的工作状态,可以得到最优或近似最优的控制效果,但是大多数的优化控制方法,面临着求解过程计算量大的问题。最小值原理作为一种可靠的优化控制方法,将全局的优化问题转化成哈密顿函数的瞬时优化问题,在保证优化效果的同时,大大减小了优化控制方法的优化计算量[6-7],因此,本文在分析机电复合传动系统多功率流特性的基础上,建立系统功率平衡方程,并以燃油消耗最少为优化目标,应用最小值原理进行机电复合传动系统优化控制策略的研究,为系统实时优化控制策略的制定提供了依据。
1 双模式机电复合传动系统
本文研究的双模式机电复合传动系统主要用以满足重型车辆大功率、大转矩的驱动需求,系统结构如图1 所示。系统由电机A、电机B、三个行星排、离合器CL0、离合器CL1、制动器B1、动力输入及输出几部分组成。R、C、S分别代表行星排的齿圈、行星架和太阳轮。
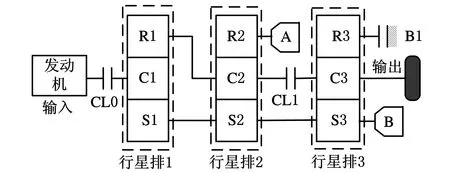
图1 机电复合传动系统结构
当离合器CL0接合时,通过控制离合器CL1和制动器B1的接合与分离,可以实现机电复合传动系统不同混合驱动模式的切换,如表1所示。

表1 双模式系统操纵关系
通过行星排转速关系和转矩分析,可以得到不同EVT模式下电机A、B的转速、转矩和系统输入输出转速、转矩的关系式,并作为优化求解时的系统约束方程。
EVT1模式:
(1)
EVT2模式:
(2)
式中,ki为各行星排特性参数,是齿圈齿数与太阳轮齿数的比值,i=1,2,3;nA、TA为电机A的转速和转矩;nB、TB为电机B的转速和转矩;ni、Ti分别为输入的转速和转矩(发动机);no、To分别为输出的转速和转矩。
机电复合传动系统是一种多流传动形式,通过电力和机械两路功率流来传递动力。机电复合传动系统的机械功率平衡方程为
Preq=Pe+PA+PB
(3)
式中,Preq为系统需求功率;Pe为发动机功率;PA、PB分别为电机A和电机B的机械功率。
当给定车速时,系统需求功率可以通过车辆行驶动力学方程计算,公式为
Preq=(fmgcosα(t)+mgsinα+

(4)
式中,f为阻力系数;m为车辆质量;g为重力加速度;α(t)为路面坡度;CD为风阻系数;A为迎风面积;ρ为空气密度;δ为系统质量系数;v为车辆行驶速度。
系统中两个电机既可以工作在发电状态,也可以工作在电动状态,电机功率与电池功率间存在电功率平衡,系统电功率平衡方程为
(5)
式中,Pbat为动力电池组的功率;ηA、ηB分别为电机A和电机B的效率(图2),通过查表获得;sgnx为符号函数,当x>0时,sgnx=1,当x=0时,sgnx=0,当x<0时,sgnx=-1。
如果电机处于电动状态,则其把电功率转化为机械功率,机械功率除以转化效率为相应的电功率;如果电机处于发电状态,则其把机械功率转化为电功率,机械功率乘以转化效率为相应的电功率。

图2 电机效率曲线
电池组模型等效为简单内阻模型,电池组功率可以表示为
(6)
式中,Ibat为电池组母线电流;Vbat为电池组开路电压;Rint为电池组等效内阻。
(7)
式中,Qbat为电池组的容量。
双模式机电复合传动系统的主要参数如表2所示。

表2 机电复合传动系统参数
2 优化控制策略
机电复合传动系统的功率分配策略可解析为:根据驾驶员的需求功率合理地分配各动力部件(发动机、电机A和电机B)间的目标功率,在保持电池组的荷电状态在允许的范围之内的同时,使得系统的燃油消耗量最少。因此,其功率分配控制策略在一段时长为[t0,tf]的循环工况下的性能指标函数可表示为
(8)


图3 发动机燃油消耗率曲线
约束条件为
ne_min≤ne≤ne_maxTe_min(ne)≤Te≤Te_max(ne)
nA_min≤nA≤nA_maxTA_min(nA)≤TA≤TA_max(nA)
nB_min≤nB≤nB_maxTB_min(nB)≤TB≤TB_max(nB)
CSOCmin≤CSOC≤CSOCmax
Pbat_min≤Pbat≤Pbat_max
式中,ne_min、ne_max、Te_min、Te_max分别为发动机的最小和最大输出转速、转矩;nA_min,nA_max,TA_min,TA_max分别为电机A的最小和最大输出转速、转矩;nB_min,nB_max,TB_min,TB_max分别为电机B的最小和最大输出转速、转矩;CSOCmin,CSOCmax,Pbat_min,Pbat_max分别为电池组荷电状态和输出功率的限制。

针对上述的能量管理控制策略的优化性能指标函数,采用最小值原理进行求解,定义哈密顿函数为
(9)

式中,p(t)为伴随状态函数。
根据文献[8],应用最小值原理取得性能指标函数最小的优化控制策略需满足以下条件:


(2)系统状态方程、边界条件和协态方程为
(10)
(11)
对于这种两点边值求解问题,应用循环迭代选取p(t)的方法,获得全局的最优控制策略并保持电池组状态变量满足|x(tf)-x(t0)|≤δ(其中,δ为允许误差),具体求解过程如图4所示。

图4 优化算法求解过程
(1)在每一个时刻t∈[t0,tf]里,根据当前时刻的目标车速,通过车辆动力学方程(式(4))计算相应的需求功率Preq(t)。
(2)根据当前的发动机状态以及式(1)、式(2)中系统的转速、转矩关系,确定控制变量u(t)=[Te(t),ne(t)]的优化取值范围,并对控制变量进行离散以方便计算:
ne∈{ne_min(t),Δne,ne_max}
Te∈{Te_min(t),ΔTe,Te_max}
(3)由式(9)计算每一个预备控制变量对应的Hi=Hi(ui),并选择使得Hi最小的相应的控制量:
(4)应用选取的最优控制量,根据式(7)计算相应的系统状态变量x(t)。
(5)重复以上步骤直至整个循环工况结束,然后计算x(tf)和x(t0),将x(tf)和x(t0)进行比较,如果满足
|x(tf)-x(t0)|≤δ
则优化求解的循环结束;否则重新选取伴随状态p0,直到满足条件为止。
3 仿真结果
根据机电复合传动系统的性能需求,优化求解中应用的重型车辆仿真循环工况如图5所示。

(a)车辆速度变化曲线

(b)电池荷电状态变化曲线图5 重型车辆仿真循环工况车辆速度及CSOC变化
仿真计算中,设定系统电池CSOC的上下限分别为0.4和0.8,初始CSOC给定为0.6,CSOC的变化情况如图5所示。由图5可知,在优化控制策略下电池CSOC始终保持在允许的范围之内且变化比较平缓。
发动机和电机A、B的工作状态如图6所示。可见,各部件均工作在合理的范围之内,且其状态变换比较平稳,能够在保证部件动态响应的前提下,实现机电复合传动系统的优化控制。

图6 发动机和电机A、B的工作状态

(a)基于规则的控制策略

(b)基于优化的控制策略图7 发动机工作点
为了说明基于优化控制策略的有效性,应用基于规则的控制策略与其进行比较,发动机工作点在万有特性曲线中的分布情况,如图7所示。本文采用的基于规则的控制策略,应用发动机油耗经济性曲线作为发动机工作点判断的主要依据。首先根据电池的荷电状态决定电池的电功率,系统需求功率与电功率之差即为发动机功率,随后通过经济性曲线即可获得发动机的控制量,进而决定系统其他部件的控制量。由于本文研究的双模式机电复合传动系统的结构较为复杂,系统各部件控制量之间存在着较强的耦合关系,当根据确定的规则使得发动机的控制量决定以后,可能在当前的状态下,其他部件的控制量并不一定能够保证该控制量的实现,从而导致发动机的实际工作点与理想值相比会存在较大的偏差,使得发动机的实际工作点分布得较为分散。而与基于规则的控制策略不同的是,基于优化的控制策略在决定系统当前控制量时,能够实时地判断系统当前的各部件控制量约束条件,从而得到满足当前耦合约束要求的发动机优化控制量。相比于基于规则的控制策略,基于优化的控制策略中发动机的工作点更多地集中在最佳燃油经济区范围之内,发动机转速的变化范围更小,工作点的分布更加合理,机电复合传动系统百公里燃油消耗量为25.42 L,与采用规则控制策略的百公里油耗28.96 L相比,减小了13.9%。这表明优化过程中,充分利用机电复合传动系统能够实现无级变速的作用,使得发动机运行在效率最高的工作点。优化后的发动机工作点分布在一定的转速和转矩范围内,而并不是集中在最优经济区内,原因是在优化过程中对控制变量的变化范围进行了相应的限制,以减少优化过程的计算量,并使得优化的结果更具有实际意义。
4 结语
在分析所研究的机电复合传动系统多功率流特性的基础上,建立系统功率平衡方程,并以燃油消耗最少为优化目标,应用最小值原理方法,进行机电复合传动系统优化控制策略的研究。仿真结果表明,相比基于规则的控制策略,基于最小值原理的优化控制策略能够保持电池的SOC状态,改善发动机的工作点,提高机电复合传动系统的燃油经济性,为系统实时优化控制策略的制定提供依据。
[1]Liu J,Peng H.Modeling and Control of a Power-split Hybrid Vehicle[J].IEEE Transactions on Control Systems Technology,2008,16(6):1242-1251.[2]韩立金,项昌乐,刘辉,等.双模式混合驱动装置电机参数匹配[J].吉林大学学报(工学版),2011,41(6):1527-1531.
Han Lijin,Xiang Changle,Liu Hui,et al.Motor Matching of the Dual-mode Hybrid Transmission[J].Journal of Jilin University(Engineering and Technology Edition),2011,41(6):1527-1531.
[3]Kim N,Kim J. Control Strategy for a Dual-mode Electro-mechanical,Infinitely Variable Transmission for Hybrid Electric Vehicles[J].Journal of Automobile Engineering,2008,222(9):1587-1601.
[4]郑海亮,项昌乐,王伟达,等.双模式机电复合传动系统综合控制策略[J].吉林大学学报(工学版),2014,44(2):311-317.
Zheng Hailiang,Xiang Changle,Wang Weida,et al.Design and Validation of Control Strategy for Dual-modeelectro-mechanical,Transmission[J].Journal of Jilin University(Engineering and Technology Edition),2014.44(2):311-317.
[5]Salmasi F R.Control Strategies for Hybrid Electric Vehicles:Evolution,Classification,Comparison,and Future Trends[J].IEEE Transactions on Vehicular Technology,2007,56(5):2393-2404.
[6]马培培,闫斌,胡艳青,等.新型混合动力系统能量管理优化研究[J].车用发动机,2013(6):1-6.
Ma Peipei,Yan Bin,Hu Yanqing,et al.Energy Management Optimization for New Hybrid Electric System[J].Vehicle Engine,2013(6):1-6.
[7]Sun D,Lin X,Qin D,et al.Power-balancing Instantaneous Optimization Energy Management for a Novel Series-parallel Hybrid Electric Bus[J].Chinese Journal of Mechanical Engineering,2012,25(6):1161-1170.
[8]张洪钺,王青.最优控制理论与应用[M].北京:高等教育出版社,2006.
(编辑王艳丽)
Power Distribution Strategy Optimization for Two-mode Electro-mechanical Transmission
Zheng HailiangXiang ChangleHan LijinZhang Donghao
Beijing Institute of Technology,Beijing,100081
Based on Pontryagin’s minimum principle,an optimal control theory was applied to derive a methodology for the power split algorithm of two-mode EMT system.Under the premise of sustaining the battery state of charge(SOC),the fuel consumption was used as the optimization objective function.Then,the optimal system working conditions were determined according to the optimization process and the mathematical model of the system.The simulation results show that the research of EMT control strategy has significant oil-saving effect.The control strategy is effective and provides the foundation for developing and optimizing the real-time control strategy.
two-mode electro-machanical transmission(EMT);power distribution;minimum principle;optimal control strategy
2014-07-07
国家自然科学基金资助项目(51305026)
U469.72DOI:10.3969/j.issn.1004-132X.2015.10.025
郑海亮,男,1985年生。北京理工大学机械与车辆学院博士研究生。研究方向为机电复合传动建模与控制。项昌乐,男,1964年生。北京理工大学机械与车辆学院教授、博士研究生导师。韩立金,男,1982年生。北京理工大学机械与车辆学院讲师、博士。张东好,男,1986年生。北京理工大学机械与车辆学院博士研究生。
