北斗卫星导航系统车载天线的设计
2015-10-27张冬杨扬
张 冬 杨 扬
(南昌理工学院 江西南昌 330044)
北斗卫星导航系统车载天线的设计
张 冬 杨 扬
(南昌理工学院 江西南昌 330044)
中国北斗卫星导航系统是全球第三个成熟的卫星导航系统,但与GPS系统相比,北斗的卫星轨道比较特殊,而且在轨卫星的数目较少,因此对天线的要求比较高,特别是车载天线是固定在一个位置上安装的,不可能通过调整旋转天线来找对一个方向,使其最大增益方向对准导航卫星来接受收信号,因此北斗系统在车载导航领域的应用还不具有优势。我们计划设计一种新型圆锥对数螺旋天线,实现可旋转和仰角低的特点,更好的满足北斗卫星车载导航系统的需求。
斗卫星导航系统 车载天线 圆锥对数螺旋天线
一、设计目标和方案论证
掌握车载天线的结构是十分必要的,按照转轴的不同数目,天线座一共可分为五种:分别为单轴天线座、两轴天线座、三轴天线座、四轴天线座和固定不动的天线座。其中,单轴天线座用途广泛,尤其在用户搜索以及引导雷达方面用途显著;两轴在波束窄的圆抛物面天线优势较为突出。用于地面的一般用单轴和两轴,车载天线用的是三轴或四轴的天线座。[1]
综合来看,二轴的天线座有很大的优点,同时也存在很多缺点。因为车载天线会随着车的晃动而晃动,车辆不处于准直状态时,俯仰跟踪轴会随之也处于非垂直状态。这种情况会对天线波束造成影响,使其发生扭动。因此,设计两轴稳定跟踪可以使其不发生偏移,但对波束的稳定不会产生很好的效果。当对追踪的精准度要求高时,这些两轴的设计是达不到预期效果的。
为了将贴片天线更好的适用于车载导航系统,使其在实际中得到更为广泛的应用,研发一种可以旋转的车载天线-圆锥对数螺旋天线,可以通过这种螺旋天线的研发获得更好的效益,并且可以实现可旋转和仰角低的特点。并从实际出发,将天线设计变小,提高其便携性等。[2]
二、双臂圆锥对数螺旋天线及设计
1.GALERKIN法
GALERKIN法是有限元方法,该方法最初由里兹提出,之后由伽辽金对其之前的方法加以改进。它的基本原理是通过在N维空间里面构造一组分段与原本相对接近的泛函,这样只用在现在的空间中加权积分,便可以得到一组易于求解的线性代数方程,进行计算。
2.曲线三角基展开GALERKIN法检验矩量法
利用曲线三角基展开GALERKIN法检验矩量法来求天线的整个过程可以总结成下面的矩阵方程组的解,在这里面:是电流矩阵,来表示线上的电流,是激励矩阵,是阻抗矩阵。[3]
3.双臂圆锥对数螺旋天线的矩量解
用矩量法来分析双臂圆锥对数螺旋天线通常分为以下三个步骤:
第一步,先描述此天线的结构,形成一种相对合适去应用矩量法的结构,对于对称性双臂的曲线型线天线,通常将两个臂分为2N+1截,每一段为N段,将激励电压源加入中间一段,这样做是可以利用天线的对称性结构,少了很多繁多的计算,这样做可以使得计算更准确,如图1所示:
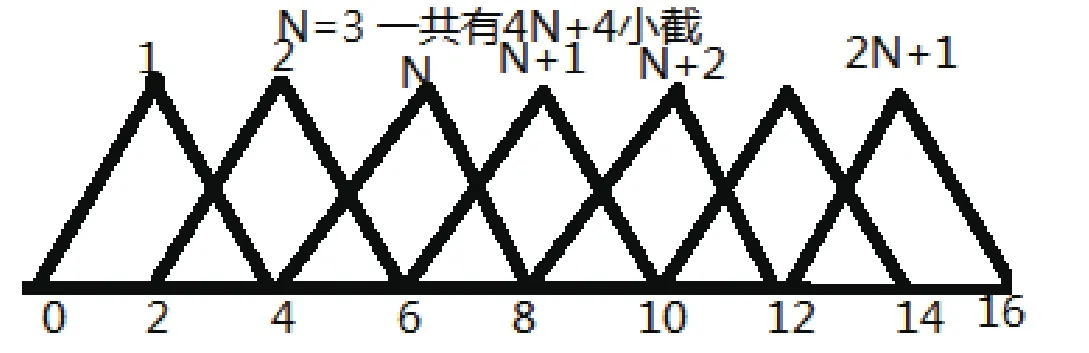
图1 天线对称性结构计算图
第二步,按照曲线段三角基展开,GALERKIN法来检验的矩量法解阻抗的矩阵,并且要按照中心对称矩阵这个性质来简化我们的运算。
第三步,要解出阻抗矩阵并且还要和外加电压矩阵作用,就要求解出线上的电流然后再求出天线的各种参数。[4]
4.双臂圆锥对数螺旋天线的方向图仿真
首先为了让天线具有宽频带特性,就要让螺旋的全数一定;接着我们可以依据设计频率的范围来确定圆锥的小端、大端直径d和D;然后圆锥的顶角0θ和螺旋角α对方向图以及波瓣的宽度影响非常大。一般,在α、δ数据一定的条件下,0θ越大波瓣就越宽,当0θ极小的时候,方向图就比较窄小,但是如果很小就将会让椎体过长;当0θ和δ一定的时候,α角度越小则波瓣就越宽;而当0θ、α一定的条件下,螺旋臂的角的宽度δ对辐射的方向图影响并不会太明显。[5]
方向图,工程上可近似表达为:
其中k为自由空间传播常数,p为相对传播常数。
北斗系统的工作波段在S波段。S波段采用2491.75MHz的中心频率,以及4.08MHz的带宽。
天线设计时通常对仰角有一定要求,因为某个目的要求,40度时为最佳仰角,满足设计要求的最大增益。为了满足信号集中等要求,在25度-55度的仰角中,功率增益不得小于4 dB。由于天线往往部署在高处,天线的高度会影响仰角,所以对天线的高度也有一定的要求。通过上述要求,可以判断角度扩展的设计为30度,选择60度的包角,半功率宽度139度。由此,可以设计出如下参数的双臂CLS天线:首先进行计算,根据已知的工作频率来计算工作频段波长:120mm-120.7mm;再分别对天线上端的截止半径和天线下端的截止半径进行计算:5.52mm和3.17mm;计算天线高度:92mm。
从图2中,我们发现角度为40度、-45度时,可以看到最大增益,这已经达到了目标的要求。[6]
结语
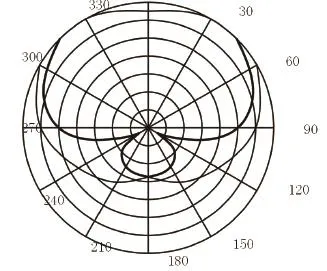
图2中心频率下的CLS天线的归一化方向图
稳定性,因此大大提高了整个系统服务的精确度。但当前这些系统功能的服务知识初始阶段,对于更好的研究和应用需要更进一步的努力和更多的时间。
[1] 谭述森,北斗卫星导航系统的发展与思考,宇航学报,中国人民解放军61081部队,北京。2008.
[2] 杨元喜,北斗卫星导航系统的进展、 贡献与挑战,中国卫星导航定位于应用管理中心,北京。
[3] 施闯,赵齐乐,北斗卫星导航系统的精密定轨与定位研究,中国科学,地球科学,2012.
[4] 唐旭,何秀凤,北斗卫星导航系统高精度相对定位性能分析,导航定位学报,2013.
[5] 王艳红,赵文智,杨明,北斗卫星导航系统及其于民航导航的应用,计算机测量与控制,2014.
[6] 周巍,北斗卫星导航系统的精密定位理论方法研究与实现,信息工程大学博士学位论文。
