抽油机电动机动态载荷模拟仿真优选技术研究
2015-10-26李付龙卢正通山东科技大学自动化学院
李付龙 卢正通(山东科技大学自动化学院)
抽油机电动机动态载荷模拟仿真优选技术研究
李付龙卢正通(山东科技大学自动化学院)
根据抽油机电动机动态载荷的工况,建立了异步电动机仿真模型,采用PID算法调节电动机扭矩使电动机优化运行,通过异步电动机建模的特例对常用四种电动机的恒功率和恒扭矩动态载荷能耗情况进行仿真分析。仿真结果表明:在含少量倒发电的正常油井工况下,永磁电动机在功率因数上有明显的优势,而开关磁阻和高转差电动机具有更高的效率及性能。该仿真控制模型验证了抽油机动态载荷的电动机性能,为油井电动机的优选与改造提供了依据。
抽油机电动机动态载荷仿真实验研究
在油田生产过程中,抽油机电动机是油田主要的电力拖动系统设备,由于抽油机的载荷周期剧烈波动,在分析和计量时较为复杂,这种工况给油井电力系统与电动机功耗匹配带来了困难,甚至抽油机经常会出现倒发电状况[1],针对同样工况的油井选择更合适的电动机才是节能的关键。
1 抽油机工况模型
油田生产中以游梁式抽油机为主,从功能上包含原动机、减速器和抽油机主体三部分。这里主要分析抽油机主体模型来体现抽油机工况特性[2]。
游梁式抽油机主体为四连杆机构[3],如图1所示。图中F为曲柄销所受的连杆拉力,P为悬点载荷,抽油过程中减速器输出轴的扭矩Tro等于曲柄半径r与作用在曲柄销处的切线力T的乘积,即
Tro=rT(1)
只要确定出曲柄销处的切线力T就可算出曲柄轴扭矩Tro。将平衡块重折算到曲柄半径r处的平衡重,可得:

式中:Wcb为曲柄平衡块总重;Wc为曲柄重;R为曲柄平衡半径; Rc为曲柄重心半径。对曲柄轴中心o′取力矩平衡,可得:
Tr+Wc′rsinφ=Frsinα(3)
由式(1)~(3)可得曲柄平衡游梁式抽油机的曲柄轴扭矩为

公式的第一项表示悬点载荷P在曲柄上造成的扭矩MP,称为油井负荷转矩,即

第二项表示曲柄及其平衡重在曲柄轴上造成的扭矩Mc,称为曲柄平衡扭矩,即Mc=Wc
'rsinφ(6)
式(4)可写成 Mcr=MP+Mc,所以直接调用油井负荷扭矩和曲柄平衡扭矩即可构建四连杆数学模型。

图1 抽油机四连杆
2 电动机模型与PID调节原理
对于一个特定工况下的抽油机电动机,设给定扭矩和实际扭矩分别为T和T1,两者的偏差量为e(t)=T-T1,e(t)经过PID控制器的控制算法调整后输出信号至电动机的测量模块,改善输出性能(见图2)。

图2 PID控制图
PID控制器主要是依据给定值与实际输出值构成控制偏差,假设输入为e(t),用公式表示:

以下分析理想异步电动机的数学模型[4],下标α、β分别代表α、β轴分量,下标s、r代表定子和转子上的量;Te、T1分别为电磁转矩、负载转矩;ωr为转子电角速度; Msr为定转子互感;J为转动惯量。
电压方程:

电磁扭矩方程:Te=npMsr(isβisα-isαisβ)
运动方程:

3/2相电压变换:

2/3相电压变换:

3 建模仿真验证
了解电动机的所有额定参数就可以仿真抽油机的工况,电动机的额定参数可以通过电动机型式试验得到。当电动机的扭矩为0时,即可得到电动机的空载特性。
根据上述数学公式搭建异步电动机仿真模型,其内置的异步电动机转换模块、异步电动机测量模块。此外还有构建的PID控制模块、抽油机特定工况扭矩加载模块T、定子侧有功测量模块以及功率因数和效率计算模块,见图3。
其中加载扭矩模块T是抽油机特定工况的S函数,factor是根据有功与无功的关系编写的功率因数 S函数,有。效率模块η=P2/P1,输出功率P2=T×n/9.55。
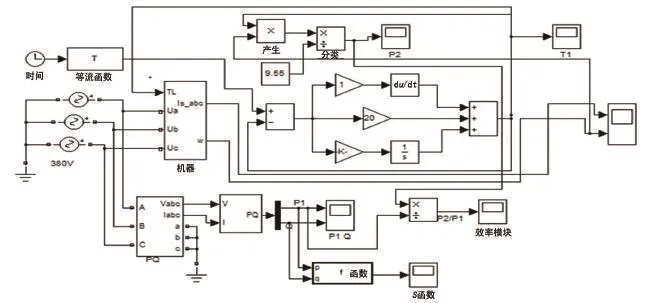
图3 仿真模型
将异步电动机替换为永磁电动机、高转差电动机、开关磁阻电动机,为对应的电动机仿真模型,异步电动机型号为YX280M-12,永磁电动机型号为TYC280M-16,高转差电动机型号为YCCH250-8,定子为Y型接法,开关磁阻电动机型号为KCT250M-10。经过调试PID参数分别为Kp=0.03,Ti=20,Kd=1。见表1。

表1 电动机参数
图4、图5、图6、图7为输入功率保持一致时的仿真结果。
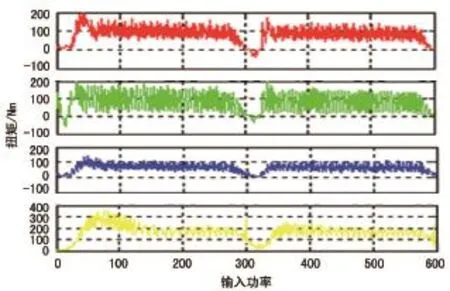
图4 输入功率与扭矩的关系

图5 输入功率与定子电流的关系
仿真结果表明,在给定加载扭矩经过PID调节后曲线性能没有较大的改善,载荷依然周期剧烈波动。在功率保持一致的情况下,开关磁阻电动机除了功率因数比永磁电动机差些,其余参数都有很大的优势,例如电动机效率是最高的(表2)。在保持电动机扭矩一致的情况下,同样的工况高转差电动机的效率最高,电动机的输入输出性能最好(表3)。
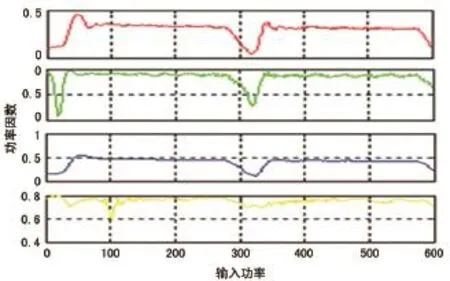
图6 输入功率与功率因数的关系

图7 输入功率与效率的关系
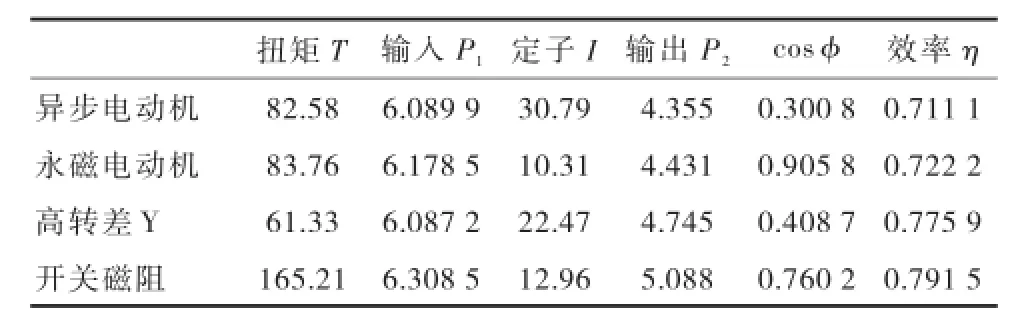
表2 输入功率一致仿真结果平均值

表3 扭矩一致仿真结果平均值
4 结论
针对同样的油井抽油机工况,建模仿真分析输入功率一致和输出扭矩一致时的电动机性能,仿真结果表明,在含有少量倒发电的正常井工况下,永磁电动机在功率因数上更具有优势,高转差电动机和开关磁阻电动机在效率方面更具有推广使用的价值,特别是开关磁阻电动机的效率一致保持在高位,为油田拖动系统电动机节能优选提供了重要参考依据。
[1]孙明施.基于MTALAB的异步电动机动态过程仿真[J].中小型电动机,1999,26(4):30-31.
[2]宋邵楼,丁永峰,范永峰.三相异步电动机的模糊自适应PID控制系统[J].计算机系统应用,2012,21(7):119-122.
[3]尹君驰,刘克毅.基于MATLAB的PID控制系统参数调节[J].电子测试,2014(3):61-63.
[4]贾立辉,郑申白,张荣华.模糊PID控制的异步电机矢量调速系统仿真[J].微特电机,2008(7):47-49.
10.3969/j.issn.2095-1493.2015.003.005
2015-01-09)
李付龙,硕士研究生,就读于山东科技大学自动化学院,研究方向为电力电子与电力传动,E-mail:1060329435@ 163.com,地址:山东省青岛市黄岛区前湾港路579号,266590。
