基于单片机的搬运电动小车
2015-10-25余会娟
余会娟
(安徽医学高等专科学校医学技术系,合肥230601)
基于单片机的搬运电动小车
余会娟
(安徽医学高等专科学校医学技术系,合肥230601)
用STC90c516单片机作为控制模块,使用ST188作为循迹模块,采用四通道驱动集成芯片L298N组成PWM脉冲调制直流电机驱动电路,使用差动方式控制直流电机的转速和转向,实现了小车的自动循迹行驶、搬运木块、自动入库等功能,并采用LCD1602实时显示小车的行驶时间和距离。
单片机;红外传感;软件设计
随着汽车工业和企业车间智能化的发展,智能车辆的研究和开发受到了越来越多的关注。相对于传统车辆,搬运电动小车因成本低、电路结构简单、稳定性高,可用于有毒有害或高温高压等特殊环境,而在工业生产和日常生活中得到了广泛应用。
本文以STC90c516单片机和3个反射式红外光电传感器ST188为核心器件,设计了一种具有自动搬物和循迹功能的智能搬运电动小车。
1 搬运电动小车模块设计
搬运电动小车需实现循迹、识别终点线、取物、放物体入库、实时显示时间及行程等功能。系统以STC90c516单片机为核心;用ST188识别红外传感器的信号、循迹和识别终点标志;以差动方式驱动直流电机,实现小车稳定行驶和取物、入库的功能;用1602液晶显示器实时显示小车的行驶时间和距离。系统硬件、软件都使用软件模块化设计,调试简单。系统总体框图如图1所示。

图1 系统总体框图
(1)循迹模块使用了3个反射式红外光电传感器ST188,其中两个用来循迹,另一个用来检测终点线。
循迹是指小车在白色地面上循黑线行走。ST188的红外发射管在小车行驶过程中,不断地向地面发射红外光,由于黑色相对于白色对光的反射程度较弱,故ST188的红外接收管可根据接收到地面反射回的光线检测出颜色,如为黑色则输出低电平,反之输出高电平。单片机以此来确定黑线的位置和小车的行走线路。
(2)实时检测模块采用开关型霍尔传感器。霍尔传感器内集成了硅霍尔片,当处于磁场中时,硅霍尔片的两电压端会有一个霍尔电势差输出。这个电势差经霍尔传感器内部的集成放大器和施密特触发器整形后,转变为方波输出。开关型霍尔传感器的输出电平与TTL电平兼容。当电机转动时,车轮转过的圈数以电信号的方式传递给单片机,车轮每转一圈,开关型霍尔传感器便输出一个脉冲,系统只需计算出单位时间的脉冲数,即可确定小车的转速,乘以小车轮胎周长可确定行驶距离。霍尔传感器电平变换速度快,具有较好的测速效果。
(3)手臂取物模块采用整体滑移形式的手臂。这是由于机械手臂有控制复杂、重量大且性价比较低等缺点,而整体滑移形式手臂形式简单,也比较容易控制。
(4)电源模块采用双电源供电。单片机和电机驱动模块若使用同一电源供电,虽然电路简单,但是由于电机启动瞬时电流大、PWM驱动电机电流波动较大,会出现电压不稳、系统抗干扰能力降低、传感器误检测等异常情况。为避免这些情况的出现,选择对电机驱动模块和单片机分别供电,以保证小车动力充足,控制稳定。
(5)电机驱动模块。直流电机驱动电路采用四通道驱动集成芯片L298N,由单片机I/O口向L298N输出信号来实现对电机的转速和转向的控制。驱动电路图如图2所示。在图2中,单片机P1.0~P1.3口连接L298N的IN1~IN4,用来控制电机转动的方向,P1.4和P1.5口连接在L298N的ENA和ENB,用来控制电机的转速。

图2 直流电机驱动电路
2 搬运电动小车软件设计
2.1 主流程设计
小车进入循迹子程序后,STC90c516单片机就开始不停地扫描连接红外探测器ST188的I/O口,一旦检测到信号发生变化,就执行相应的检测子程序,以控制小车电机的动作,显示小车运动的时间、距离和协调小车各个部分的运动。
图3为系统流程图。该程序可以实现小车稳定地循迹行驶、终点线停车及物体入库功能,实时检测并显示小车行驶时间及路程。
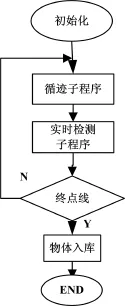
图3 系统流程图
2.2 PWM调控设计
在方波脉冲作用下,电机通电时,速度增大;断电时,速度减小。因此,在小车行进的过程中,占空比越高,电机转速越快。在直线前进和转弯的时候,占空比应该区别对待。这是因为,若车速太快,则在转弯时,方向不易控制,而车速太慢,又会延长转弯时间。
系统通过调整单片机内部定时器T0的初始值来实现PWM控制输出,在P1.4和P1.5口分别产生占空比不同的方波脉冲,其中,P1.4口输出小车左轮PWM信号,P1.5口输出小车右轮PWM信号。系统利用差动方式驱动直流电机,实现对电机转速的控制。调控程序如下:

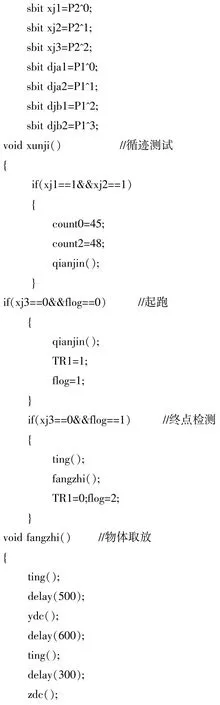
2.3 部分控制程序
小车进入循迹模式后,单片机就开始扫描与ST188连接的I/O口,P2.0、P2.1和P2.2只要检测到信号发生变化,就执行相应的子程序:左转、右转、起跑、终点检测或取放物品等,并通过P1.0~P1.3口来控制2个电机转动的方向,即控制小车左右轮的转动方向,同时,设置占空比来控制小车的行驶,改变小车的行动状态。参数初始化和部分子程序如下。

3 测试结果
电机驱动模块测试结果如表1所示。
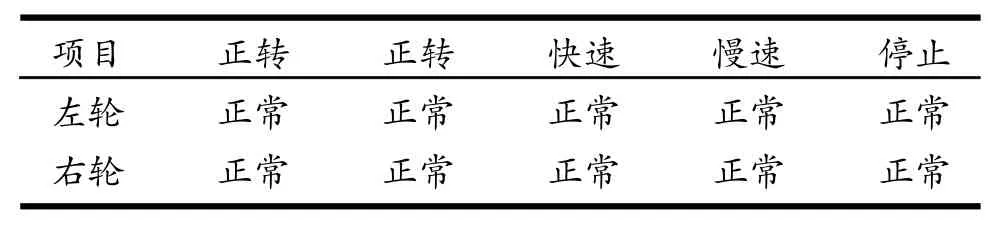
表1 电机驱动测试结果
LCD显示模块测试结果如表2所示。由表2可见,STC90c516单片机内部定时/计数器在计时上存在微小误差。
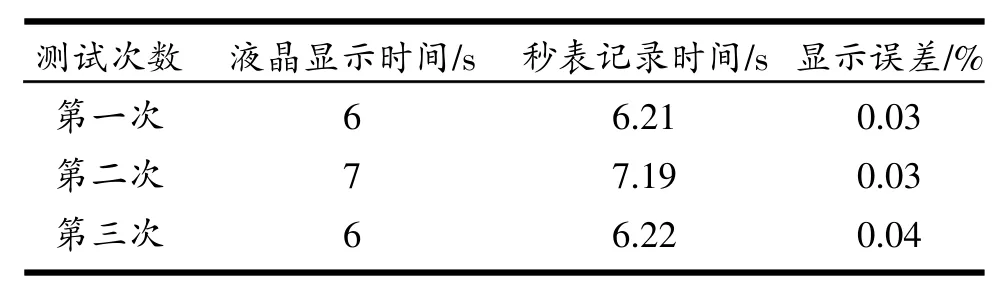
表2 LCD显示精度测试数据
为测试搬运电动小车的性能,采用顺时针和逆时针两个方向分别运行的测试方法。表3为4次搬运木块的测试结果。
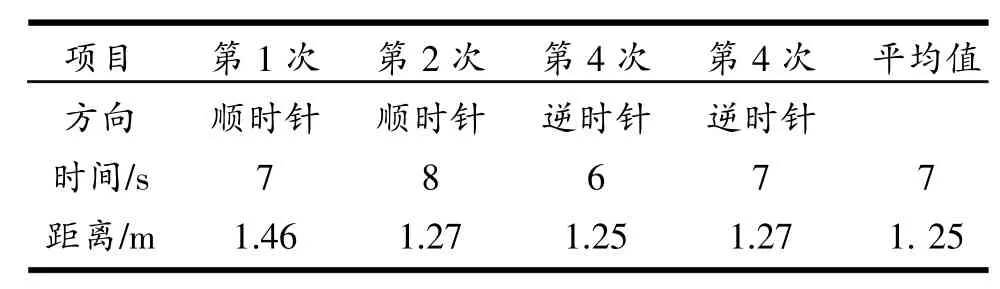
表3 性能测试结果
4 结束语
搬运电动小车采用单片机STC90c516为控制模块、反射式红外光电传感器ST188为循迹模块,并采用此外,搬运电动小车还可以增加超声波测距模块,完成对前方障碍物与小车之间距离的检测,并将数值反馈给主程序以实现小车自动避障;增加遥控电路模块以实现人为干预小车行驶或紧急制动,实现人机沟通等功能,使搬运电动小车更加智能化。
C语言单元模块化设计,使得系统简洁、稳定性强、精度高。测试结果表明:小车实现了循迹、识别终点线、取物、放物体入库、实时显示时间及行程等功能。
[1]胡汉才.单片机原理及其接口技术[M].3版.北京:清华大学出版社,2010:200-317.
[2]黄智伟.全国大学生电子设计竞赛系统设计[M].北京:北京航空航天大学出版社,2006:56-210.
[3]董涛,刘进英,蒋苏.基于单片机的智能小车的设计与制作[J].计算机测量与控制,2009(2):380-382.
[4]兰羽.基于红外传感器ST188的自动循迹小车设计[J].电子设计工程,2013(3):64-66.
【责任编辑 梅欣丽】
The Carrying Electric Car Based on Single Chip Microcomputer
YU Huijuan
(Medical Technology Department,Anhui Medical College,Hefei 230601,China)
The study used STC90c516 microcontroller as the control module,and ST188 as the tracking module.The study realized the car's functions of automatic tracking driving,carrying wood,automatic warehousing by using PWM pulse modulation DC motor drive circuit which was composed of four-channel integration chip L298N,and realized controlling the dc motor's speed and steering by using differential mode.The study also realized the real-time display of the car's running time and distance by using LCD1602.
single chip microcomputer;infrared sensor;software design
TP216
A
2095-7726(2015)12-0064-3
2015-07-01
安徽省教育厅质量工程项目(2013zjjh045)
余会娟(1979-),女,安徽合肥人,讲师,研究方向:电子与通信。