永磁同步电机传动系统的非线性控制策略及其调速系统的实现
2015-10-24李凌杰敬一立
李凌杰,敬一立
(武汉船用电力推进装置研究所,武汉 430064)
永磁同步电机传动系统的非线性控制策略及其调速系统的实现
李凌杰,敬一立
(武汉船用电力推进装置研究所,武汉 430064)
介绍了永磁同步电机传动系统调速系统控制。首先简单分析了非线性控制策略,进而分析了电流返回解耦方式和SVPWM原理,设计双闭环控制器,介绍系统软硬件设计。实验结果证实控制器设计的正确,空载条件下,稳态时速度波动幅度不超过2 rpm,稳定性良好;速度给定10 rpm时,稳态误差为1 rpm,系统低速运行效果良好。证明了电流返回解耦方式和SVPWM原理线性控制策略具有很好的动态性能和稳定性。
永磁同步电机传动系统调速系统非线性控制
0 引言
永磁同步电机控制系统包括速度和位置两部分,传动系统一般代表速度控制系统,近几年来,随着电力电子技术的不断发展,交流控制系统得到广泛使用,精度和可靠性都有了很大的提高,永磁同步电机控制系统在多种领域受到广泛使用,对于永磁同步电机控制系统而言,单一非线性方法仅仅针对某一问题,本文主要分析永磁同步电机传动系统的几类非线性控制策略和调速系统的实现。
1 调速系统性能要求
电气传动在发展中广泛应用于工业领域中,20世纪60年代以后,交流调速系统开始得到广泛使用,交流电动机没有换向机构,结构简单、运行安全可靠,而且具有宽调速范围、快速动态响应性能,能够实现产品系列化。交流调速包括同步电动机调速和异步电动机调速,永久磁铁励磁同步电动机属于同步电动类型,采用稀土材料,大大降低电动机体积和重量,维护方面,一般动率小于10 kW,性能超过了直流伺服装置,能够消除转子损耗,但是保持恒功率调速比较困难。
交流调速系统朝着绿色化、网络化发展,交流调速系统数字化克服了电路功能单一性、控制精度不高等特点,控制灵活性更高。调速系统智能化更是发展的非常快,除了常规PID控制外,高性能智能控制器能够实现调速系统参数自检测。网络化发展能够同时保持与上位机的联系,设备控制和通讯更加方便,能够进一步完善工业控制。交流调速系统绿色化便于各种PWM控制,能够降低滤波电抗、电容,减少对电网的伤害。调速系统性能在设计中要求高精度、快响应、宽调速范围。在速度控制中,要求调度精度高,尽可能减少静态和动态速降,要求跟踪信号指令信号相应快。除了满足这几点要求之外,电动机调速系统要求能够在整个转速中平滑运转,尽可能减少转矩波动,满足低速大转矩的要求,电动机要求尽可能减少转动惯量,保证电动机能够承受频繁的启动和反转等动作。
2 永磁同步电机传动系统非线性控制策略
永磁同步电机传动系统控制包括矢量控制、直接转矩控制、先进控制等。矢量控制是在1971年提出的一种理论,交流电机运行性能得到很大的提高,模仿电机控制方式,以转子磁链作为参考坐标,将电子电流分解为两个分量,然后分别对其进行独立控制。采用质量控制系统具有良好的转矩效应,可实现全负载运行,但是在实际运用中发现想要进行坐标变换,运算量过大,对电机参数依赖性很大,控制效果不佳。
直接转矩控制策略是继矢量控制后提出的一种理论,摒弃了矢量控制的解耦思想,强调直接控制电机转矩,因此该理论忽略了矢量转换等计算,采用定子磁链定向方式,直接控制电机磁链和转矩,这种控制策略简单明了,方法简单,但是会出现转矩脉动问题。
先进控制策略是近些年不断使用的控制理论,包括自适应、滑膜变结构控制、自抗扰控制等。自适应控制技术是在确定模型下修改系统运行程序以达到控制对象和条件的理论,在测量信号基础上,在线估计不稳定被控对象,并输入参数估计值,当前所采用的自适应控制模型,多是这种理论。此方式能够保值电机良好性能,但是计算量较大。滑膜变结构控制采用的是开关控制方法,控制不具有连续性,能够根据调量的偏差控制系统运行,滑动模型可以设计,与参数无关,这种控制理论容易实现,但是存在抖振问题。无源控制从能量角度出发,配置系统能量消耗特性舞动分量,不会影响系统无功力稳定性,这是一种比较稳定的控制方法,但是存在很多不确定性,适应性不强,抗负载能力也不高。自抗扰控制能够自行检测并补偿内外扰动,计算量小,但是可调参数比较高,不容易实现。逆系统控制是近几年提出的一种理论,设计理论比较完善,避免了对微分几何理论的引入,但是系统参数随工况变化较大。反步控制是一种比较新颖的控制策略,在设计中需要保证虚拟误差方程指数收敛为零,算法简单,能够保证系统稳定性,但是计算量很大,需要花费较长调整时间。
3 永磁同步电机无速度传感器控制技术
永磁同步电机控制系统中,在转子轴上需要安装传感器,但是会增加转子轴转动惯量,系统可靠性大大降低,应用场合也受到控制,因此无速度传感器是为满足这点而出现的,根据无传感器 PMSM转子位置自检测方法在不同速度之间的结果,一般使用在中高速方法和低速方法中。中高速控制方法动态性能良好,但是对基波依赖性很高,低速控制方法利用电机凸级性实现转子位置的跟踪。
适合于中高速无速度传感器的技术主要为磁链估计法,这种方法计算量少,简单操作易实现,对电动机参数依赖性较大。适用于低速的方法是利用电机凸级效应检测转子磁位,如高频电压信号注入法,利用转子凸级性,提出转子的位置,无检测滞后,但是需要注意高频信号幅度大,干扰基波电量。
4 系统控制器设计
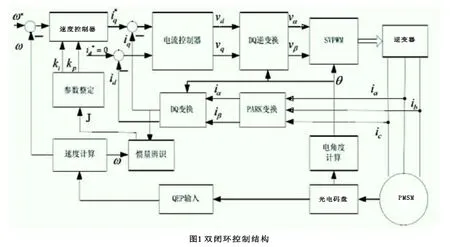
永磁同步电动机等效为双闭环坐标直流电机,整个PMSM调速系统与双闭环形式直流调速相似性很高,采用的理论模型为自适应理论模型的一种,在不改变环境情况下,给定性能指标变为参考性能指标,模型自适应速度很高。双闭环控制结构件图1所示,包括电流控制器、电流反馈和矢量控制算法三部分,电流反馈通过电流采样电路进行坐标变换得到电流反馈量,输出电流与反馈电量相同。速度环由速度控制器、速度反馈等组成,在反馈环节中,需要经过速度计算环节得到当前转速。


在推导四度控制器中,速度环截止频率需要保持在电流环频率的1/8左右,因此电流环环节可以看做为惯性环节,在不考虑负载转矩和阻尼情况下等效为一阶惯性环节,由于Tcf远远小于时间常数,可以进一步简化速度环框图,经过PI串联校正后,速度环为典型II型系统,根据电机和控制参数得到 Kps=0.76,在不考虑阻尼影响下,性能良好,只改变转动惯量,就能够得到很好的控制效果。
5 系统软硬件设计和实验
系统硬件设计包括功率板和控制板,功率板包括开关电源、系统主电路以及保护检测电路等,开关电源包括九路输出,包括为控制板提供供电电源,供给驱动芯片采用3210,供给功率板运算放大电路等。
系统主电路为电压型逆变器形式,包括工频电流转换、滤波回路以及逆变器等,主电路结构件图3所示,图中R1是指软启动电阻,主要是避免瞬间电流过大,控制电路有规则地控制逆变器开关管的导通,驱动电动机运行。


电流检测电路包括电平转换电路和霍尔元件,其中霍尔元件量程为-12 A~+12 A,DSP采样量程为 0~3.3 V,因此需要在霍尔元件加入电平转换环节,起到缓冲、隔离以及提高等作用。在DSP采样处理中,减去偏置值,得到采样信号值,系统初始化时,未运行电流采样值为准则。采样程度中将采样值经过软件滤波完成电流采样环节。
在计算中采用电压矢量控制算法,在过压和欠压保护中需要监测母线电压值,母线电压由电平转换电路和分压电路构成,母线电压经过 RC滤波之后,信号引入放大器,将信号接入采样通道中,需要注意电压控制在DSP和AD量程中,避免损坏DSP。在软件处理中,为避免影响系统稳定性,母线电压不能改变过频。过流保护电路由电压比较器构成,正向电流过流值采用 HOC基准,负向电流采用LOC电压基准,超过电压基准值会输出过流信号,在系统过流时,过流比较器输出低。过压保护器主要由电压比较器组成,保护电路见图4所示,采用母线电压采样值作为基准电压,大于基准电压,输出过压信号。
控制器设计包括控制面板、DSP最小系统以及接口电路等,控制面板为最基本人机界面,发出的显示数据为串行数据,在尽可能减少外部电路条件,形成正常系统。在调试程序中,将程序安装在RAM中,实现单步调试,由于RAM资源有限,外部扩展4片RAM。码盘信号采用差分信号输入,抗干扰能力强,采用 26LS32芯片转换差分信号。
系统软件设计中,系统主控制芯片为TMS320LF2407A,基于DSP调速系统设计中,对速度要求很高,系统受控状态量变化很大,在软件设计中,需要充分利用DSP资源。主程序完整功能包括DSP式中、事件管理器、A/D等模块等,主程序模块流程为开始→禁止看门狗→设置时钟→设置 I/O口→设置事件管理器→设置AD→变量初始化→转子初始位置检测→中断。中断程度是系统出现过电压和过电流情况下发出的中断。由于TI公司DSP仅仅支持定点运算,为保证控制精度还需要用到浮点计算,采用各个变量标么值数学表述形式。系统在额定状态下,各变量标么值取1,启动时,标么值大于1,因此每一个变量采用16位表示。模拟量检测是永磁同步三相定子电流检测,电机电流为零时,电压取1.65 V,AD转换值取512,采用软件方法很容易得到实际转换结果。
在实验中,每个电流环周期均进行4次采样,在理论值上减去2048,由于实际上零点偏移,偏置值并不是2048,因此需要采用多次采样值,取平均值,得到U相电流偏置值为1909,W相为1792。速度环实验中,速度取 600 rpm,在空载条件下,稳态时速度波动幅度不超过2 rpm,稳定性良好,速度给定 10 rpm时,稳态误差为 1 rpm,系统低速运行效果良好。高速运行时,速度环取2000 rpm试验,误差不超过6 rpm,高速运行效果良好。
6 结语
综上所述,本文在分析永磁同步电机传动系统非线性控制策略基础上,分析了调速系统的设计,根据直流电机双闭环调速系统工程设计双闭环控制器,推导自适应转动惯量辨别算法,并通过实验验证控制器设计的有效性,由于时间的限制,硬件平台抗干扰软硬件还需要进一步改进,保证速度环运行的稳定性。
[1] 侯利民. 永磁同步电机传动系统的几类非线性控制策略研究及其调速系统的实现[D]. 东北大学,2010.
[2] 田书欣,杨喜军,刘占军,等. 地板水暖矢量控制调速系统转子位置滑模观测器的研究[J]. 电机与控制应用,2011,38(1): 25-28.
[3] 侯利民,王巍. 无速度传感器的表面式永磁同步电机无源控制策略[J]. 控制与决策,2013,(10): 1578-1582,1586.
[4] Sato D,Itoh J I. Improvement of the electric energy consumption of permanent magnet synchronous motor drive system using three-level inverter[J]. Ieej Transactions on Sensors & Micromachines,2015,5: 135.
[5] Gong Xianwu,MA Jian,Xu Shufen,et al. High efficiency and fast response control of permanent magnet synchronous motor for electric vehicles[J]. China Journal of Highways&stransport,2014,27: 171-170.
[6] 唐闻新. 基于模糊控制的永磁同步电机速度控制系统设计[D]. 合肥工业大学,2011.
[7] 周锋. 基于矩阵变换器的永磁同步电机无速度传感器调速系统研究[D]. 中南大学,2012.
[8] 周野. 基于双向DC/DC变换器的无刷直流电机转矩脉动抑制研究[D]. 西南交通大学,2011.
Nonlinear Control Strategy and Realization of the Speed Control System for Permanent Magnet Synchronous Motors Drive System
Li Lingjie,Jing Yili
(Wuhan Institute of Marine Electric Propulsion,Wuhan 430064,China)
The speed control system of drive system for the permanent magnet synchronous motor is introduced. The nonlinear control strategy,the current return decoupled manner and SVPWM principle are analyzed. The dual closed-loop controller is designed and the system hardware and software is described. Experimental results demonstrate the correct of the controller design. What is,in no-load conditions,the fluctuation range is no more than 2rpm in the steady state and has good stability. When a 10rpm speed is given,the steady-state error is 1rpm and the system works well at low speed. The results prove that the current return decoupled manner and SVPWM principle of the linear control strategy has a good dynamic performance and stability
permanent magnet synchronous motor; the transmission system; speed control system; nonlinear control
TM351
A
1003-4862(2015)12-0072-05
2015-09-30
李凌杰(1983-),男,工程师,研究方向:电气工程。