盾构法穿越建筑物掘进技术
2015-10-23周雷
周雷
(中铁十六局集团地铁工程有限公司,北京市 100124)
盾构法穿越建筑物掘进技术
周雷
(中铁十六局集团地铁工程有限公司,北京市 100124)
以长沙地铁1号线一期工程下穿建筑物施工为实例,介绍盾构隧道下穿建筑物时控制地层沉降的主要措施及掘进参数的控制。
盾构法;建筑物;参数控制;地层沉降
0 引言
长沙地铁1号线一期工程南门口站至侯家塘站区间为盾构区间,下穿劳动路南侧中意电器家属楼和南区政府家属楼。该建筑物修建于20世纪80年代,结构多处开裂。下面介绍盾构机穿越该建筑物过程中的参数控制要点。
1 工程概况
1.1 盾构机概况
从环境条件、施工条件、施工设备费用等多方面进行比较,选用土压平衡铰接式盾构机,刀盘直接6.28 m,盾构管片1.5 m一环。针对不同切削要求(包括不同地质要求)设置了8把17′单刃中心滚刀,31把17′单刃滚刀,40把切刀,32把边缘刮刀,14把贝壳刀和1把超挖刀,其中滚刀和齿刀的刀座形式相同,根据不同的地质类型两种刀具可以切换。刀盘开口形式为对称的8个长条孔,刀盘的开口率为37%。
1.2 区间及建筑物概况
南门口站-侯家塘站区间右线,盾构平行下穿5层中意电器家属楼。该建筑物建于20世纪80年代初,结构形式为5层砖混结构,基础类型为人工砖砌桩基础,深度为入岩0.5 m,区间右线隧道进入建筑物,距离桩底垂直距离4.64 m,盾构覆土14.7 m。房屋与隧道平面及纵剖面关系见图1、图2。
现场踏勘发现结构多处出现裂缝,原有混凝土碳化严重,部分有露筋现象,经过长沙城科检测有限公司对房屋评估,房屋安全性能鉴定为Bu级。
由于隧道下穿结构物,地面加固空间狭小,加固难度较大,无法实施地面加固,只能通过盾构掘进参数及监控量测的反馈意见来控制建筑物的变形及地面沉降。
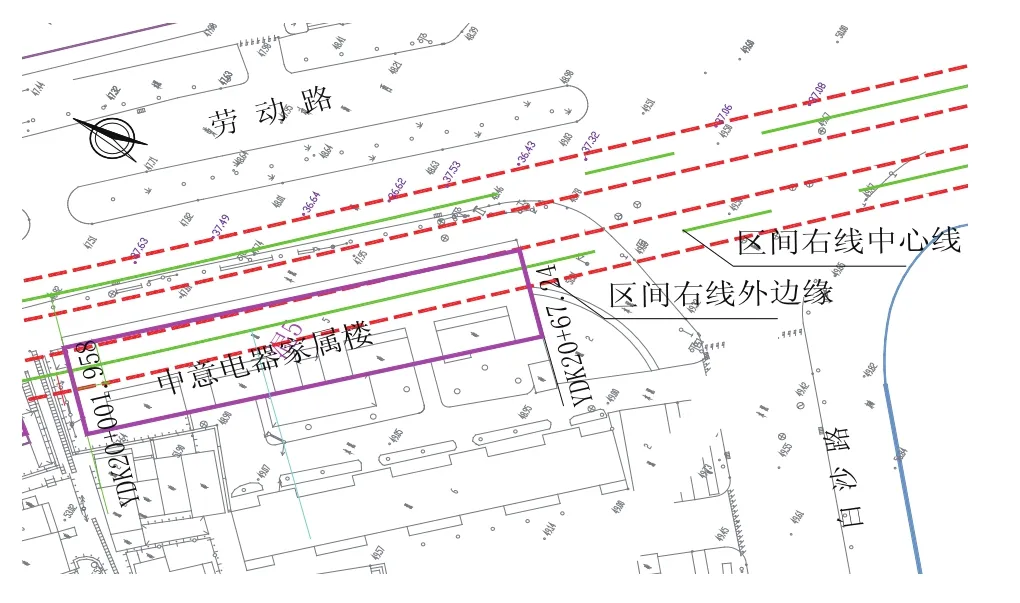
图1 中意电器家属楼与区间隧道平面示意图

图2 中意电器家属楼与盾构隧道剖面示意图
1.3 工程地质
根据地质资料,本区域自上而下地质情况描述如下:
通过危房区间盾构机主要穿越<7-2-2>泥质粉砂岩(Ks)和<7-3-3> 砾岩(Ks),上部为<1-2-1>杂填土、<3-1>粉质黏土、<3-9>卵石、<5-1>粉质黏土。<7-2-2>泥质粉砂岩(Ks):成岩风化严重,岩石结构大部分遭到破坏,岩石结构清晰,但遇水易软化,属极软岩,岩体基本质量等级为Ⅴ类,顶面埋藏深度5.60~16.40 m。<7-3-3> 砾岩(Ks):砾状、角砾状结构,泥质、钙质胶结,岩屑成分主要为砂质、硅质或灰质,砾石呈棱角状,粒径2.0~4.0 cm,节理裂隙发育,属软岩,但岩芯完整呈柱状,遇水易软化,岩体基本质量等级为Ⅳ类,顶面埋藏深度8.40~37.40 m。地质条件相对较好。
1.4 水文地质
(1)地表水
区间线路位于城市中心地段,距湘江最近约0.44 km,地貌单元属湘江Ⅱ~Ⅲ级阶地,地表水对隧道施工影响较小。
(2)地下水
区间地下水类型主要为第四系孔隙潜水及基岩裂隙水。第四系孔隙潜水含水层顶面埋深介于地表下10.20~14.50 m,地下水具有弱承压性,水量较丰富,常年水位变化幅度8~12 m,根据现场抽水试验结果,砂卵层的抽水试验渗透系数7.47~19.46 m/d,属中等~强透水性地层。
2 施工监测点的布置
根据调查的实际情况,优化设计要求的参数指标,提高保护等级,设定地表沉降控制指标为-20 mm,沉降变形预警值为-10 mm。适当减小出渣量,防止土层损失和对地面沉降造成的影响。
2.1 地表沉降监测点布设
沿隧道方向每5 m布设一个断面,每个断面埋设10个地表沉降点。
2.2 建筑物沉降点布设
在建筑物四角的基础上布设沉降监测点,在结构柱上布设沉降监测点。监测点布置见图3。

图3 建筑物沉降监测点布置图(单位:m)
2.3 水位监测孔布设
由于地下水丰富,地下水位变化对建筑物影响也相当大,因此在建筑物旁左右线之间打设4个水位监测孔S2~S5,每个孔间距14.5 m监测水位变化。
2.4 巡视安排
(1)使用铅垂安装在建筑物四角的结构柱上,对建筑物的竖直度进行监测。
(2)安排专人对建筑物及附近地面进行巡视。
(3)提前50 m对建筑物及地表情况进行巡视,巡视小组24 h轮流巡视,并做好巡视记录,每日对沉降情况进行通报,发现问题及时汇报。
2.5 监测频率
在刀盘到达建筑物前20 m每天监测1~2次,下穿建筑物时实行24 h监控,盾构通过后50 m每周监测一次。
3 控制地层沉降的主要措施
盾构隧道下穿建筑物施工过程中,主要根据“匀速通过、严注浆、勤测量、二次注浆跟进”来控制建筑物的变形。
隧道内的盾构机在掘进过程中需控制好姿态,盾构机姿态变化应在允许范围内,纠偏幅度不宜过大,保证管片能够顺利脱出盾尾,保持盾构机平稳推进,避免掘进过程中对周围土体扰动过大从而引起超挖,控制地面沉降。
3.1 匀速通过
作业人员要做好出渣情况记录,控制好出渣量,根据地层情况正确选择掘进参数,力求“平稳、匀速推进、低扭矩、顶住正面、调整压力、封住盾尾”,盾构司机要控制好刀盘扭矩、推进速度、泡沫参数、渣土情况等在合理范围内。做好各单位间的协调配合,减少故障,从而避免发生意外造成停机,缩短围岩的暴露时间和变形。圆形土压平衡盾构机理论排土体积V为:V=π/4·r2·L(式中:r为开挖直径,L为推进长度)。我部采用盾构机为6.28 m开挖直径,理论出土量为46.5 m3。取松散系数为1.3,虚方量为60.5 m3,盾构掘进速度控制在20~30 mm/min,最快不大于40 mm/min。土舱上部压力控制在0.08~0.12 MPa,以保证前方土体稳定,达到土压平衡的状态。
3.2 严注浆
同步注浆是对盾尾形成的施工空隙进行填充注浆,是控制地层沉降的一个重要环节之一。严格控制同步注浆量和浆液质量,主要做到以下几点:
(1)保证每环注浆总量。
(2)保证盾构推进每箱土的过程中均匀合理地压注。
(3)浆液的配合比必须符合标准,可以根据实际情况合理修改浆液配合比。
直径为6.28 m的盾构,理论建筑空隙为: 1.5π(6.282-6.02)/4=4.05(m3)。实际的压注量为每环管片理论建筑空隙的150%~200%,即每推进一环同步注浆量为5.4~8.1 m3,所以注浆量每环大于6 m3,控制在8 m3左右,注浆压力约为0.2~0.24 MPa。同步注浆浆液1 m3用量为:水泥200 kg;水460 kg;砂779 kg;粉煤灰410 kg;膨润土50 kg。浆液配比根据实际情况及时进行优化调整。
3.3 二次注浆
盾构机经过后,随着同步注浆浆液逐步扩散稳定,管片壁后压力逐渐释放,在压力释放的过程中地层随之沉降,所以会在一段时间内形成一个持续的沉降过程,一般在3 d之后达到稳定。盾构施工中为减小这种延续沉降,就需要对管片壁后进行二次注浆,继续填充管片壁后与地层间的空隙。二次注浆浆液采用水泥浆,水灰比为1∶1,二次注浆的压力、压注量应根据实际情况而定,终孔压力为0.4 MPa。二次注浆位置选择在3、10、12点钟的管片吊装孔注入,将吊装孔打穿,注浆头拧紧后进行注浆,严禁从K块小块管片吊装孔注入,管片脱出盾尾5环进行二次注浆。
注浆人员对注浆压力、注浆量、注浆点位、注浆时间进行记录。可对相同位置进行重复注浆,已确保空隙填充密实。
4 掘进参数的控制
盾构开挖面的地层以中、强风化砾岩及中、强风化泥质粉砂岩为主,节理裂隙发育、泥质物填充,粘结性好,抗变形性及稳定性较好。施工中出渣情况显示,地层含水量少、泥质成分含量高,在掘进过程中选用以下掘进参数:
(1)盾构千斤顶油压小于13 MPa,总推力小于1 100 t。
(2)刀盘扭矩小于2 600 kN·m,推进速度不大于40 mm/min,刀盘转速约为1.5 r/min。
(3)上部土舱压力控制在0.08~0.12 MPa,平均土压为0.09 MPa以上,推进将要结束前将土压设为0.09~0.13 MPa,以防在停机拼装管片时土舱压力下降过低。
(4)泡沫剂百分比为3.0%~6.0%,溶液与空气的流量混合比为1∶12~1∶16,每4根泡沫剂流量为85%。
(5)使用质量较好的盾尾油脂,预防盾尾漏浆以保证注浆效果。
(6)掘进中严格控制出渣量,控制每环出渣总量的同时还要控制好每斗出土量。每斗渣土虚方约18 m3,出一斗渣土盾构机千斤顶行程不应小于35 mm。
(7)盾构机穿越地层含水量小,土舱内渣土较干,土体与刀盘摩擦产生的温度较高,需向土舱内加水,防止刀盘结泥饼。
5 结语
严格按照以上措施组织施工,盾构顺利穿越中意电器家属楼,平均每天掘进6环(9 m),从刀盘进入家属楼基础范围至盾尾顺利脱出基础范围用时8 d。地面沉降变化无异常,在DKY20+020位置沉降量最大,为2.65 mm,建筑物F4号监测点沉降最大,最大沉降量为-3.59 mm,地下水位S5号监测孔变化最大,最大变化量为-570 mm,盾构掘进过程中对家属楼内居民没有造成任何不良影响,取得良好的社会效益。
U455.4
B
1009-7716(2015)04-0189-03
2014-12-10
周雷(1982-),男,北京人,工程师,从事市政工程施工安全管理工作。