汽车悬架LQR控制的差分进化算法研究
2015-10-22陈小兵潘二东昆明理工大学交通工程学院云南昆明6505002湖南省汽车技师学院
陈小兵 潘二东(-昆明理工大学交通工程学院云南昆明6505002-湖南省汽车技师学院)
汽车悬架LQR控制的差分进化算法研究
陈小兵1,2潘二东1
(1-昆明理工大学交通工程学院云南昆明6505002-湖南省汽车技师学院)
基于LQR控制器的汽车悬架能很大程度上改善悬架性能,但是控制器加权系数矩阵Q与R没有确定的解析方法,由先验知识决定,难以得到全局最优的LQR控制器。因此,利用差分进化算法设计DE-LQR悬架最优控制算法求解控制器加权系数矩阵,在Simulink中建立悬架仿真模型联合算法进行仿真。结果表明,DE-LQR悬架最优控制算法能大大提高悬架性能,车身加速度减小了2.144%,悬架动位移减小了31.336%,轮胎位移减小了12.25%;设计的DE-LQR算法无需先验知识,避免了人为主观因素,实现悬架最优控制,同时算法能够自适应调整全局最优解与局部最优解的关系,最快速度求解理论的全局最优解,大大提高了DE-LQR优化算法性能。
汽车悬架LQR控制差分进化算法DE-LQR系数优化
引言
悬架系统对车辆乘坐舒适性、行驶平顺性与操作稳定性具有非常重要的影响[1],主动悬架可根据工况情况采取相应控制实现乘坐舒适性与平顺性的改善,因此成为车辆悬架系统的研究热点,而控制策略是悬架系统的核心与实现最优控制效果的关键[2-4]。线性二次最优控制LQR(linear quadratic regulator)由于理论成熟,在悬架系统控制中已取得良好效果[5-6],但是控制器控制效果优劣完全取决于加权系数矩阵Q与R,而对于Q、R的选取却没有明确的解析方法,只能依靠先验知识去定性地选择[7-8],因此,所得到的最优控制器是人为主观的最优,并非理论最优,且费时费力。智能算法在求解最优问题上表现出优秀的性能[9],并且对问题的理论知识要求较少,在工程领域得到了广泛应用,模糊控制、模拟退火算法、遗传算法对LQR加权系数矩阵进行优化,取得了优秀效果[10-12],但是模糊控制器依赖于模糊规则的提取,模拟退火具有很强的局部搜索能力,缺乏搜索全局最优解的能力,遗传算法参数设置不好,容易出现早熟,收敛于局部最优,或者不收敛,全局收敛能力弱,且几种智能算法虽然非处理问题的专业知识要求不强,但是算法复杂,需要较强的理论基础,不方便工程人员直接应用,差分进化算法具有向种群个体学习的能力,根据种群个体间的差异,自适应地调整全局与局部搜索能力,并且相比其他进化算法操作简单,易于实现,因此具有其他智能算法无可比拟的优越性能[13]。因此本文利用差分算法对LQR加权系数矩阵进行优化,消除人为主观因素,提出一种差分线性二次型最优(DE-LQR)控制策略,并将其应用于汽车悬架控制系统中,通过Simlink仿真,得到全局最优的LQR控制策略。
1 悬架系统数学建模
文章旨在研究基于差分进化算法的悬架系统LQR控器制策略的优化方案,提出一种悬架系统的优化方案,故对悬架系统进行简化,以1/4车辆模型(以单轮车辆模型为研究对象,单轮二自由度模型如图1所示。

图1 单轮二自由度模型
如图1所示,mv为簧载质量,mw为非簧载质量,ks为悬架刚度,kw为车轮刚度,车身垂直位移为xv,车轮垂直位移为xw,路面垂直位移为xr,悬架阻力系数为c,控制力为U。
对系统受力分析,由牛顿运动定律建立系统的运动方程如下。

状态变量为:

路面输入为滤波白噪声:

式中,G0为路面不平度系数,v为车辆前进速度,w为高斯白噪声,f0为下截止频率。
由式(1~3)可得状态方程为:

其中:

2 汽车悬架LQR控制器
2.1LQR理论
由于所研究系统为线性时不变系统,引入最优控制的性能指标J,即设计一个输入量u,使得J最小。

式中Q表示状态变量的加权矩阵,R表示输入变量的加权矩阵,tf表示控制作用的终止时间,矩阵S则对控制系统的终值做出了某种约束,这样的控制问题称为线性二次型(LQ)最优控制问题,最优控制信号取决于状态变量和Riccati方程的解,由此问题转化为二次型最优调节问题(LQR)。
2.2悬架LQR控制器
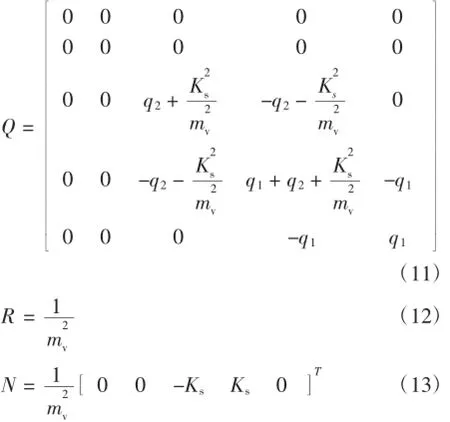
评价悬架的性能指标主要从乘坐舒适性与与操作稳定性相关指标中选取,因此将车身垂向加速度、悬架动行程与轮胎动位移作为评价指标。由此建立的悬架LQR评价模型为:

将式(4)代入式(9)可得:

式中:
控制器的最优控制力为:

式中:x(t)为任意时刻的反馈状态变量,K为最优控制反馈增益矩阵。
由式(1)~(4)与式(8)~(14)建立二自由度单轮悬架仿真模型如图2所示。

图2悬架仿真模型图
由于评价指标单位与数量级不同,因此直接加权需要对其做归一化处理,这里引入被动悬架性能指标,根据式(9)~(14)建立优化系统的模型。

式中:X为优化变量,q1,q2,q3为加权系数,BA、SWS、DTD分别为车身垂直加速度、悬架动行程、轮胎动位移的均方根值。BApas、SWSpas、DTDpas为被动悬架相应性能指标。s.t.为约束条件.
3 基于汽车悬架的LQR控制差分进化算法
3.1差分进化算法
差分进化算法DE(differential evolution)把个体间的差分信息作为个体的扰动量,因此算法能够自适应全局搜索,早期个体差异大,扰动大,能在大范围内搜索全局最优解,后期个体差异小,扰动小,算法在小范围内挖掘局部最优解,加快算法的收敛。这种向个体种群学习的能力使得在性能上优于其他进化算法,而且只需通过个体差分就能完成关键的进化步骤,相比其他进化算法操作简单,控制参数少,易于实现,标准差分进化算法执行过程与他进化算法类似,通过交叉变异选择完成进化操作,不同点是进化过程简单有效。
变异过程以个体的差分信息为扰动,结合当前个体产生变异个体,其数学模型如式(16)所示。

交叉过程通过交叉概率决定是以变异个体作为试验个体还是以目标个体作为试验个体,其数学模型如式(17)所示。

选择是以贪心策略从试验个体与目标个体中选取优秀个体作为新的种群,其数学模型如式(18)所示。

式中:(fUti)为试验个体的目标值,(f)为目标个体
结合式(16)~(18)流程得出的标准差分算法流程如图3所示。
首先需要设置DE的种群规模NP、变异常数F与交叉概率CR三个控制参数,然后随机产生初始种群,再根据适应度函数计算适应度值,完成种群初始化工作。接着对初始种群进行进化操作,变异是以初始种群为目标个体按差分进化算子生成变异个体,交叉是交叉概率从目标个体以变异个体中选取试验个体,并计算试验个体的适应度值,与目标个体适应度值进行比较,择优选取,完成进化操作。最后判断是否满足结束条件,是则结束进化,输出最优解,否则进行进化。
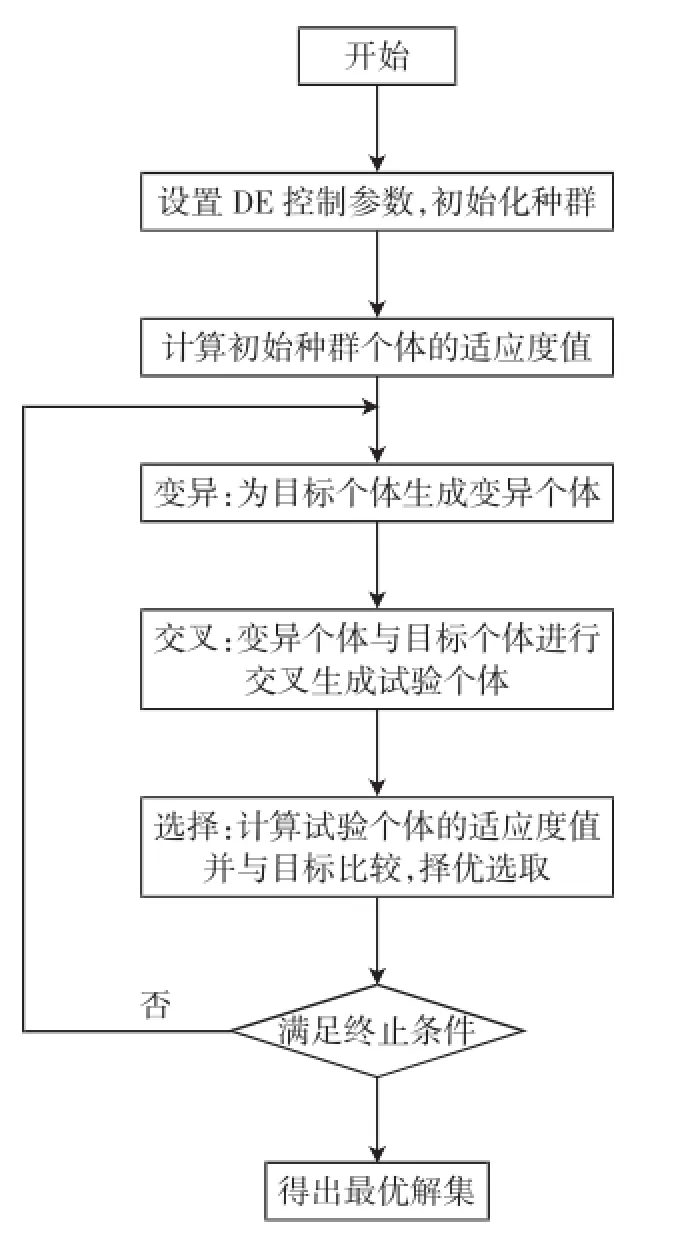
图3 差分算法流程图
3.2基于汽车悬架的DE-LQR算法
综上所述,将差分进化算法应用于悬架系统的LQR控制器设计之中,提出一种DE-LQR悬架优化设计方案,通过与simulink悬架模型联合仿真实现,其算法流程如图4所示。
具体算法步骤为如下:
1)将待优化变量X编码成初始时种群。
2)将种群个体依次赋值给LQR控制器,计算最优控制反馈矩阵。

图4 DE-LQR算法流程图
3)仿真悬架模型,得到车身垂直加速度、悬架动行程、轮胎动位移的相应指标,再计算出评价函数的目标值。
4)判断是否满足终止条件,是则结束,输出结果,否则,对种群进行进化操作,得到进化后的种群,跳转到步骤(2)。
4 仿真分析
根据DE-LQR优化算法联合,汽车悬架仿真模型进行仿真分析,其中主要仿真参数如表1所示,包括汽车悬架参数与差分算法参数,[UB,LB]为优化变量的范围。仿真结果如表2所示。
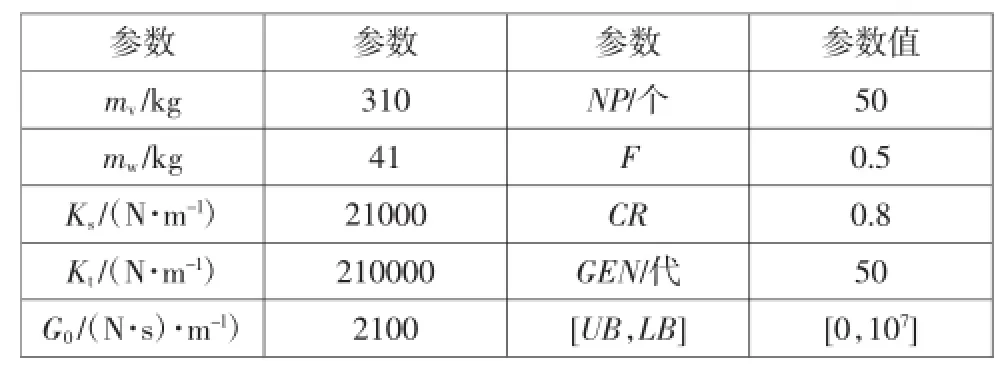
表1 仿真模型参数

表2 仿真结果
从表可知,悬架系统整体得到了优化,车身加速度减小了2.144%,悬架动位移得到了很大优化,减小了31.336%,轮胎位移减小了12.25%。由此可知DE-LQR优化算法能显著提高悬架性能。
如图5所示,DE-LQR算法能很快搜寻到全局最优解集,并且局部搜索能力也很强,在进化到15代时已经找到全局最优解,正式由于差分扰动所具有的自适应调整策略所带来的优秀性能。
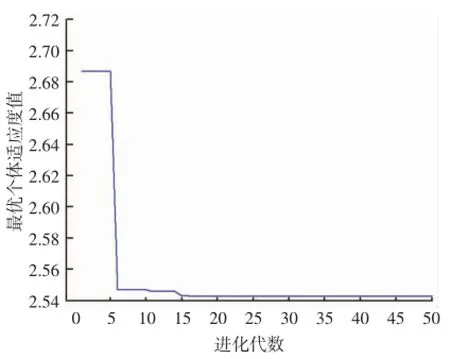
图5 最优个体适应度值进化情况
5 结论
1)针对LQR控制器加权系数矩阵难以选择的问题,利用差分进化算法独特优势提出DE-LQR最优算法,并应用与汽车悬架控制之中。
2)根据悬架系统数学模型,建立悬架系统LQR仿真模型,联合DE-LQR算法进行仿真,仿真结果表明,所设计的算法能显著提高悬架性能,其中,车身加速度减小了2.144%,悬架动位移减小了31.336%,轮胎位移减小了12.25%。
3)DE-LQR算法无需先验知识,避免了人为主观因素,实现悬架最优控制,同时算法能够自适应调整全局最优解与局部最优解的关系,最快速度求解理论的全局最优解,大大提高DE-LQR优化算法性能。
4)所设计的优化算法不仅可用于更为复杂的悬架系统中,亦可用于其他系数优化与控制问题中,为此类问题提供新的解集方案。
1吴龙,闻霞.6自由度半车悬架解耦及其分层振动控制的研究[J].汽车工程,2010,37(2):148-154,167
2王其东,梅雪晴.汽车半主动悬架的研究现状和发展趋势[J].合肥工业大学学报:自然科学版,2013,36(11):1289-1294
3刘栋,唐焱,顾慧芽.汽车主动悬架控制系统的发展研究[J].液压气动与密封,2010(05):21-25
4郑兰霞,江斌,胡修池.车辆悬架控制系统的发展及应用现状研究[J].农业装备与车辆工程,2006(03):11-14,37
5潘公宇,聂秀伟,陈立付,等.七自由度主动空气悬架最优控制的研究[J].机械设计与制造,2010(2):97-99
6Lal Bahadur P,Barjeev Tyagi,Hari Om Gupta.Optimal control of nonlinear inverted pendulum system using PID controller and LQR:performance analysis without and with disturbance input[J].International Journal of Automation& Computing,2014(6):661-670
7吕红明.基于状态反馈的四轮转向汽车LQR优化控制[J].盐城工学院学报(自然科学版),2013(02):40-44
8拓守恒,邓方安,雍龙泉.改进教与学优化算法的LQR控制器优化设计[J].智能系统学报,2014(05):602-607
9张彦如,陈黎卿,刘忠存.基于遗传算法和模糊控制的半主动悬架控制[J].合肥工业大学学报:自然科学版,2006,29(12):1545-1548
10孟杰,陈庆樟,张凯.基于模拟退火算法的汽车悬架最优控制研究[J].重庆交通大学学报(自然科学版),2013,12(3):497-501
11李树江,胡韶华,吴海.基于LQR和变论域模糊控制的吊车防摆控制[J].控制与决策,2006(03):289-292,296
12郭一峰,徐赵东,涂青,等.基于遗传算法的LQR算法中权矩阵的优化分析[J].振动与冲击,2010(11):217-220,264
13汪慎文,丁立新,张文生,等.差分进化算法研究进展[J].武汉大学学报(理学版),2014(04):283-292
LQR Control Based Differential Evolution Algorithm of Vehicle Suspension
Chen Xiaobing1,2,Pan Erdong1
1-Faculty of Transportation Engineering,Kunming University of Science and Technology(Kunming,Yunnan,650500,China)2-Hunan Motor Vehicle Technician College
The LQR controller can improve the performance of vehicle suspension,but the weighted matrix Q and R of the LQR couldn't be analyzed certainly,they are determined by prior knowledge.So it is difficult to get the global optimal LQR controller.Using differential evolution algorithm,DE-LQR is designed to solve the weighted coefficient matrix of LQR.The optimal control algorithm suspension simulation model is established in Simulink and simulated.The results show that the DE-LQR suspension optimal control algorithm can improve the suspension performance greatly,body acceleration is reduced by 2.144%,suspension dynamic displacement is reduced by 31.336%,and tire displacement is reduced by 12.25%.The DE-LQR algorithm designed needn't prior knowledge.Thus the artificial subjective factors are avoided,optimum suspension control is achieved.At the same time,the DE-LQR can adaptively adjust the relationship the global optimum solution and local optimum solution.
Vehicle suspension,LQR control,Differential evolution,DE-LQR,Coefficient optimum
U469.7;TP18
A
2095-8234(2015)04-0056-05
2015-06-02)
陈小兵(1979-),男,研究生,主要研究方向为新能源汽车、汽车系统动力学及汽车检测与维修。
