引入DDS算法的旋转LED空间稳定成像方法研究
2015-10-22黄刚
黄 刚
(太原工业学院电子工程系,山西太原 030008)
引入DDS算法的旋转LED空间稳定成像方法研究
黄 刚∗
(太原工业学院电子工程系,山西太原 030008)
提出一种引入直接数字频率合成算法(DDS:Direct Digital Frequency Synthesis)的旋转LED高精度空间成像方法.巧妙地将三维物体的旋转LED空间成像问题转化为阵列信号的生成问题,并通过引入DDS算法输出高精度阵列信号,实现了旋转LED长时间稳定的高精度空间成像.经仿真实验和线阵列旋转LED成像平台实验的结果表明,与现有方法相比,本文方法简单、可靠,空间成像稳定.
DDS;旋转LED;高精度成像
1 引 言
高清晰的空间三维立体显示技术实现了三维场景在真实空间中的全视角、完美化呈现,其在医学研究、军事应用、文艺娱乐、建筑科技、机械生产等领域有着巨大的应用潜力及广阔的发展环境.目前,空间三维显示技术大致包括体三维显示、全景视场三维显示和全息三维显示等三大类.其中,体三维显示技术可实现动态效果,可分为扫描体显示技术(Swept-Volume Display,代表作为: Felix3D和Perspecta)和固态体显示技术(Solid-Volume Display,代表作为:DepthCube)等两种.
现有扫描体显示技术中显示状态的变换,大多根据定时器触发转换[2]或根据测量角度[3]触发转换,这些方法均存在量化时产生的累积误差问题,随着时间的推移,累积误差越来越大,成像质量将越来越差,如出现边缘模糊等现象.因此,本文针对扫描体显示技术中的高精度空间成像问题展开了研究,基于单阵列LED旋转平台,提出一种引入DDS算法的旋转LED高精度空间成像方法,巧妙地将LED高精度成像问题转化为高精度信号发生问题,实现了三维物体的高精度空间稳定成像.经仿真实验和平台实验的结果表明,与现有方法相比,本文方法简单、可靠,空间成像稳定.
2 旋转LED空间成像原理简介
人眼视觉的时间特性——观察运动的分辨率有限,即在视觉残留(人眼所看到的影像消失后,能够在0.1~0.4 s期间持续保持其图像成像)的作用下,一系列离散的独立画面看起来就可能像连续的一样.如电影或电视的成像过程正是利用了这一特性,使用一系列前后衔接变化不大的静止图像(帧)的快速切换造成了运动的效果.因此,为产生真实视觉效果,实现旋转LED的高精度空间成像,需要满足两个条件:首先,图像(帧)的重现速度必须确保帧与帧之间的动作过渡平滑;其次,重现速度还必须使视觉残留能够覆盖刷新切换时所产生的闪烁(人眼的刷新频率分辨率为42 Hz[4]).
对于线阵列旋转LED来说,为实现空间成像,首先,需要确定待显示三维物体、场景或平面文字的空间位置,如显示文字时直接显示在旋转LED柱状表面或者显示在某一空间平面等.然后,均匀采样旋转LED柱状表面,获得旋转一周时LED的各待显示状态,如图1(a)中给出了一种线阵列旋转LED(包括32个LED)在其旋转表面成像一个文字,旋转一周时LED包含32种显示状态,因此,可实现32×32的旋转表面点阵成像[5];图1(b)中给出了一种空间平面成像时横截面上的采样过程,其中均匀采样点P1、P2和P3为待显示状态,其状态根据待显示平面上点p1、p2和p3的值来确定.最后,旋转LED旋转时,根据事先存储的各待显示状态显示内容,实现空间成像.

图1 一种线阵列旋转LED空间成像原理Fig.1 Principle of line array rotating LED space imaging
令图1中线阵列旋转LED高度为H,旋转速度为V,旋转半径为r,则为实现空间连续成像,对转速的基本要求为:

3 引入DDS算法的旋转LED高精度空间成像方法
为实现旋转LED高精度空间成像,其旋转一周时各显示状态之间的转换是关键.旋转LED的成像类似于波形生成过程,即各显示状态输出波形幅值,其旋转过程的状态转换生成周期性波形.如图1中,线阵列LED(32个LED)在各显示状态可认为是波形幅值(32个LED即32位二进制数).现有旋转LED成像方法,大多是基于时间(定时器)或角度(编码器)的,随着时间的推移,其累积误差会逐渐增多,影响成像质量.
DDS算法是一种从相位概念出发直接合成所需波形的全数字频率合成技术,具有极高的频率分辨率、极快的变频速度,连续的变频相位、较低的相位噪声等,目前已被广泛应用于通信、雷达、导航、电子侦察、干扰与抗干扰等众多领域.本文拟将DDS算法引入到旋转LED高精度成像过程中,根据待显示内容,生成高精度周期性波形,进而实现旋转LED的高精度成像,其成像过程流程图如图2所示.个待显示状态.

图2 引入DDS算法的旋转LED高精度成像方法流程图Fig.2 Flowchart of rotating LED high-precision imaging methods based on DDS algorithm
(2)将线阵列LED每一显示状态(二进制数)转换为波形幅值,由此根据各显示状态获得一个周期性波形;
将线阵列LED的N个显示状态转换为十进制幅值数据,并生成波形,例如直接显示在旋转表面上,则可直接将待显示文字的字模数据以类似方式转换为波形幅值,并生成波形.如按32×32的平面LED点阵,生成十六进制编码字模数据存于ROM表中,作为待显示波形幅值.以码盘计数值n作为采样周期Tc,则离散的相位序列为:

得到所对应的离散波形函数如下:

以线阵列旋转LED为例,引入DDS算法的旋转LED高精度成像方法具体步骤如下:
(1)针对待成像内容,确定线阵列LED旋转一周时需要显示的状态及数目;
以线阵列旋转LED(32个LED)显示“电”字为例,确定线阵列LED旋转一周时需要显示的状态及数目.
首先,确定待成像位置,待成像内容的高度和宽度.待成像位置可直接成像在旋转LED的旋转表面,也可成像在任意空间平面,如图2中给出了拟成像在距离旋转LED轴线距离为h的空间平面上.待成像内容的宽度最大不超过空间平面的宽度L(可由旋转半径r和H确定);高度不得高于线阵列LED的高度.

图2 空间成像平面的位置Fig.2 Location of the space imaging plane
然后,采样获取各待显示状态.根据图1(b)中的方式,均匀采样旋转LED表面,如采样32× N个点,将这些点映射到待显示内容平面(待显示文字时需提取其字模),即获得旋转过程中N
以各状态对应的相位序列为横轴,ROM表中的字模数值为纵轴,生成的波形图如图3所示.
(3)根据待生成的周期性波形,线阵列旋转LED旋转过程中,利用DDS算法生成高精度波形;
DDS算法实质是以基准频率源(系统时钟)对相位进行等间隔的采样,其基本原理框图如图4所示.
由图中可知,DDS主体部分是由相位累加器和波形存储器(即ROM查询表)组成.波形存储器(ROM表)存放待产生的周期性波形,即由线阵列旋转LED转换得到的波形.在每一个时钟周期,N位相位累加器与其反馈值进行累加,其结果的高L位作为查询表的地址,然后从ROM表中读出相应的幅值送到线阵列LED模块.

图3 旋转表面显示时各显示状态组成的周期性波形图Fig.3 Periodic waveform chart constituted by each display status when the displaying on the Rotating surface

图4 基于DDS算法的显示基本原理框图Fig.4 Basic principle Block diagram of display based on the DDS algorithm
相位累加器可根据旋转LED旋转周期确定,相位增量计算公式为:

其中,f0为旋转频率,fc为系统时钟.
通过控制相位增量,即可控制生成波形的频率.将整周期相位2π分成M份,则每一份为δ= 2π/M.若相位增量选择为δ的K倍,则待产生波形的频率为:

因此,通过设置频率控制字K(相位累加步长),就可以改变待输出波形的频率、成像的宽度,即可用于调整成像的显示效果.
4 实验结果与分析
4.1算法仿真实验结果与分析
在MATLAB环境下,根据图1中给出线阵列旋转LED系统,建立仿真平台,图5给出了使用DDS算法且分辨率为32×32时的成像仿真结果图;进一步,对多种状态进行仿真分析,给出几种分辨率且改变频率控制字时的仿真结果对比图,如图6所示,其显示分辨率分别为32×662、32×960、32×1 280.
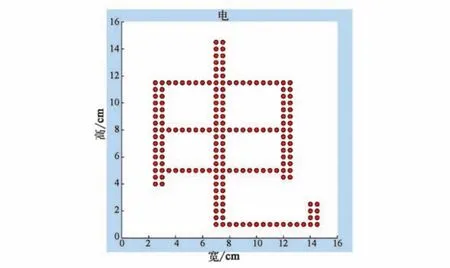
图5 分辨率为32×32成像方法仿真结果图Fig.5 Simulation results of imaging method with resolution of 32×32
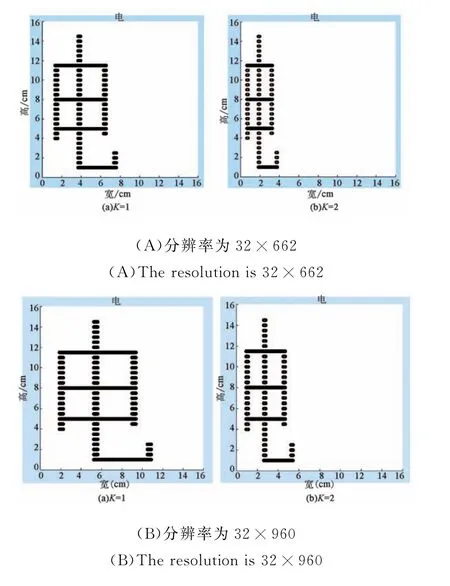

图6 基于DDS算法的高精度成像实验仿真结果图Fig.6 simulation results of high precision imaging test based on DDS algorithm
对比图5和图6中的仿真结果可知,基于DDS算法的成像过程清晰、稳定.
4.2实验平台实验结果与分析
本文进一步搭建了线阵列旋转LED实验平台,对本文提出的成像方法进行验证.如图7所示,搭建的旋转LED实验平台主要由支架、旋转装置、电源模块、相位检测模块、控制模块、驱动模块和LED等构成.
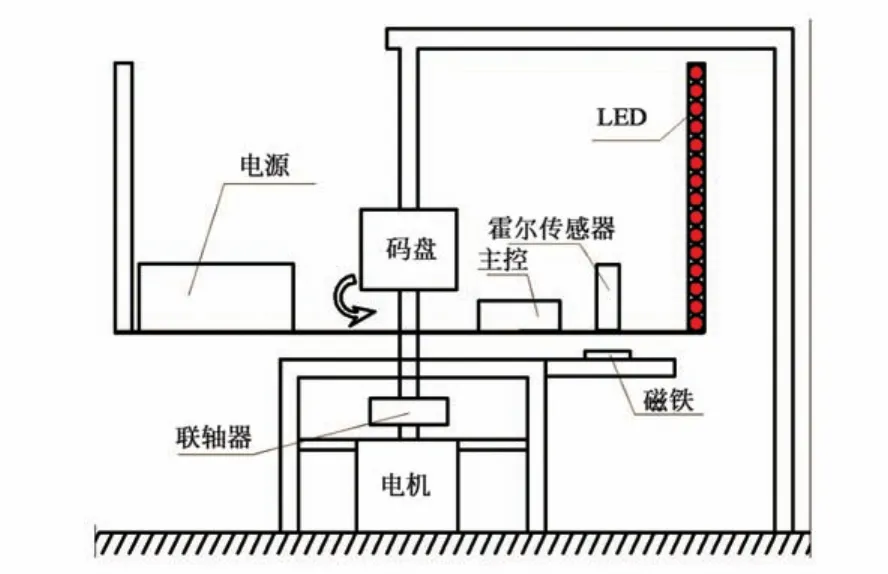
图7 线阵列旋转LED实验平台结构示意图Fig.7 Structure diagram of line array rotating LED experiment platform
图8给出了实验平台的硬件设计及其元器件选型情况.其中,主控CPU模块选择了STM32,角度测量硬件设计上,选用霍尔传感器实现支架基准点的实时检测,选用2000P/R增量式编码器检测旋转角度.
系统软件框图如图9所示,通过霍尔中断服务程序记录旋转圈数,并结合定时器计算出当前转速,当转速大于2 520 r/min钟且霍尔传感器检测到基准位置时开始显示初始状态,否则等待.在开始显示的同时开启编码器计数器检测、记录旋转增量,当脉冲增量为41时进入编码器溢出中断更新显示状态,否则等待.

图8 旋转LED实验平台的硬件设计元及元器件选型Fig.8 Hardware design unit and component selection of rotating LED experiment platform

图9 软件流程图Fig.9 Software flow chart
由仿真结果分别选取分辨率为32×960和32×1 280进行实测分析,结果如下:
由图10和图11可见,在分辨率方面,使用基于DDS算法下的实验平台成像,在水平方向上实现高分辨率显示.
更进一步,对显示内容相同、字宽度和高度比例相同的情况下,通过理论计算分析,对传统方法和引入DDS算法后,由累计误差所带来的图像吻合率的值进行比较.比较结果如表1所示,分析得出传统的使用编码器的方法,图像吻合率受编码器的线数决定,并且由于累计误差原因使得吻合率偏低.引入DDS算法后,消弱了累计误差的影响,提高了图像吻合率.在实验平台上,通过实际调试,对未使用DDS算法和引入DDS算法实际显示图像进行比较,其成像结果如图12所示.由图中可见,引入DDS算法的成像结果边缘清晰、画面稳定,显示效果得到明显改观.

图10 分辨率为32×32平板成像方法测试结果图Fig.10 Test result of flat panel imaging method with resolution of 32×32

图11 基于DDS算法和实验平台的实验结果图Fig.11 Results figure based on DDS algorithm and the experiment platform


图12 成像结果比较图Fig.12 Comparison chart of imaging results

表1 图像显示吻合率Tab.1 Image display rate of matching
5 结 论
本文提出一种引入DDS算法的旋转LED空间稳定成像方法,仿真实验和实际搭建的系统实验均表明,与现有方法相比,本文方法有效抑制了图像抖动和边缘模糊等现象,与现有方法相比,本文方法实现了空间高精度、稳定成像.
[1] 林宇翔,刘向东,陈刚.环场LED多色显示屏的设计[J].仪器仪表学报,2002,23(5):116-107,119.
Lin Y X,Liu X D,Chen G.Design of cylindrical LED multicolor display[J].Chinese Journal of Scientific Instrument,2002,23(5):116-107,119.(in Chinese)
[2] 林远芳,刘旭,刘向东,等.基于旋转二维发光二极管阵列的体三维显示系统[J].光学学报,2003,23(10): 1158-1162.
Lin Y F,Liu X,Liu X D,et al.Three-dimensional volumetric display system utilizing a rotating two-dimensional LED array[J].Acta Optica Sinica,2003,23(10):1158-1162.(in Chinese)
[3] 邓宏贵,李志坚,吴让亮,等.基于步进电机细分驱动技术的旋转LED显示屏设计[J].液晶与显示,2008,23(5): 595-598.
Deng H G,Li Z J,Wu R L,et al.Design of rotating LED display screen based on micro-stepping of moto[J]. Chinese Journal of Liquid Crystals and Displays,2008,23(5):595-598.(in Chinese)
[4] 林远芳,张晓洁,徐韡,等.体显示中点阵扫描模式对体像素方位的影响[J].浙江大学学报(工学版),2005,39(8): 1273-1276.
Lin Y F,Zhang X J,Xu W,et al.Effects of the dot matrix scanning mode on the orientation of voxels in volumetric display system[J].Journal of Zhejiang University(Engineering Science),2005,39(8):1273-1276.(in Chinese)
[5] 黄小龙,宋弘.大型全彩色LED显示屏系统的设计与实现[J].自动化与仪器仪表,2012(2):130-133.
Huang X L,Song H.Design and realization of Large-scale LED full color display-screen system[J].Automation &Instrumentation,2012(2):130-133.(in Chinese)
[6] Blundell B G,Schwarz A.The classification of volumetric display systems:characteristics and predictability of the image space[J].IEEE Transactions on Visualization and Computer Graphics,2002,8(1):66-75.
[7] 韩壮志,李伟,王田苗,等.光电码盘四倍频分析[J].电子技术应用,2000,26(12):38-40.
Han Z Z,Li W,Wang T M,et al.Quadruple frequency analysis of photoelectric encoder[J].Application of Electronic Technique,2000,26(12):38-40.(in Chinese)
[8] 王永虹,徐炜,郝立平.STM32系列ARM Cortex-M3微控制器原理与实践[M].北京:北京航空航天大学出版社,2008.
Wang Y H,Xu W,Hao L P.STM 32 Series ARM Cortex-M 3 Microcontroller Principles and Practice[M].Beijing:Beihang University Press,2008.(in Chinese)
[9] 张晓洁,刘旭,刘向东,等.旋转LED阵列体显示系统的仿真平台构建[J].浙江大学学报(工学版),2005,39(10): 1541-1544.
Zhang X J,Liu X,Liu X D,et al.Establishment of simulation platform for volumetric display system based on rotating LED array[J].Journal of Zhejiang University(Engineering Science),2005,39(10):1541-1544.(in Chinese)
[10] 邓耀华,吴黎明,张力锴,等.基于FPGA的双DDS任意波发生器设计与杂散噪声抑制方法[J].仪器仪表学报,2009,30(11):2255-2261.
Deng Y H,Wu L M,Zhang L K,et al.Design of dual DDS arbitrary wave generator based on FPGA and denoising of spur noise[J].Chinese Journal of Scientific Instrument,2009,30(11):2255-2261.(in Chinese)
[11] 何乐生.基于DDS算法的12导联心电信号发生器设计[J].仪器仪表学报,2010,31(2):275-280.
He L S.Design of 12 lead ECG signal generator based on DDS arithmetic[J].Chinese Journal of Scientific Instrument,2010,31(2):275-280.(in Chinese)
[12] 赵志勇,常文革,黎向阳.一种宽带信号产生的DDS PLL Hybrid新型结构及实现[J].国防科技大学学报,2013,35(4):103-108.
Zhao Z Y,Chang W G,Li X Y.A novel DDS-PLL hybrid structure for wideband signal generation[J].Journal of National University of Defense Technology,2013,35(4):103-108.(in Chinese)
[13] 刘光辉,唐小宏.DDS阵列频率源技术研究[J].电子科技大学学报,2004,33(4):341-344.
Liu G H,Tang X H.Research of frequency synthesizers technology based on DDSarray[J].Journal of University of Electronic Science and Technology of China,2004,33(4):341-344.(in Chinese)
[14] 宋媛媛,曾大治,曾涛.基于三阶DDS的卫星信号多普勒模拟方法[J].北京理工大学学报,2010,30(10): 1213-1216.
Song Y Y,Zeng D Z,Zeng T.Satellite signal doppler simulation method based on third-order DDS[J].Transactions of Beijing Institute of Technology,2010,30(10):1213-1216.(in Chinese)
[15] 王辛.基于DDS技术的波形设计[J].现代电子技术,2010,36(14):1-3,9.
Wang X.Waveform design based on DDS[J].Modern Electronics Technique,2010,36(14):1-3,9.(in Chinese)
Rotating LED image display based on DDS algorithm
HUANG Gang∗
(Taiyuan Institute of Technology,Taiyuan 030008,China)
This paper offers a high precision imaging method for rotating LED based on DDS algorithm.It transforms the problem of rotating LED space imaging for three-dimensional object into Array signal generation problem and outputs high precision array signal by introducing DDS algorithm,realizing high accuracy spatial imaging of rotating LED stably for a long time.Simulation experiments and line array rotating LED imaging platform experiment results show that,compared with the existing method,this method is simple,reliable,and stable.
DDS;rotating LED;high precision imaging
文献标识码:A doi:10.3788/YJYXS20153006.1008
1007-2780(2015)06-1008-08
黄刚(1975-),男,山西运城人,硕士,副教授,主要研究方向为图像模式识别、智能机器人的运动控制. E-mail:huangdong0122@163.com
2014-12-10;
2015-01-15.
山西省科技攻关项目(No.20130321014-02)
Supported by Scientific and Technolagical Project in Shanxi Province(No.2013032104-02)
∗通信联系人,E-mail:huangdong0122@163.com
