无人机航测技术的应用与实践
2015-10-21梁增伟
梁增伟
【摘要】以生产项目为例,以无人机航测的技术流程为主线索,介绍了无人机航测技术方面的发展。得到了关于无人机航测技术的一些结论和建议:提高无人机航测技术的关键在于航摄技术的提高,无人机航测技术是大飞机航测的有益补充,在灾害应急等方面无可替代的优越性,但在航测地形图(DLG)尤其是大比例尺地形图生产方面还存在一些问题。
【关键词】无人机; 航测技术
前言
无人驾驶飞机简称 “无人机”,它的诞生可以追溯到上个世纪初叶,但主要运用于战争侦查。二战结束后,随着航空技术的飞速发展,无人机家族也逐渐步入其鼎盛时期。时至今日,无人机已经广泛运用。在民用方面,改革开放以来,我国也加快了对无人机研究与开发的工作。与有人驾驶飞机相比,无人机有体积小、便携带、运用地域广泛、可执行恶劣环境工作等优点,这使无人机摄影测量技术得以在灾情监测与评估工作中有了很大的发展空间。
在卫星及大飞机遥感等航空遥感技术的不断发展的基础上,一项新的技术逐渐形成——无人机航测遥感技术。它广泛应用于应急测绘保障、国土资源监测、重大工程建设等方面。这项技术不仅机动灵活,响应快速,同时成本低廉精度值高。但除此之外,现有技术也存在着许多弊端。例如,航向重叠度和不规则旁向重叠度、像幅不大像片数量多、影像的倾角过大且倾斜方向没有规律、航摄区域地形起伏大、高程变化显著,以及较大的影像比例差异和旋偏角,影像畸变现象较明显。
自上世纪80年代以来,无人机测绘系统成为世界各国竞相研究的热点课题。随着计算机技术、通讯技术的发展,无人机的性能也水涨船高,应用范围和应用领域迅速拓展,这为无人机测绘系统的研制提供了保障。目前,国内测绘行业在制作DOM和DEM上广泛应用了无人飞行器航测遥感技术,不过这种技术并没有实际应用于大比例尺DLG,而是以小面积的实验取代。在当前最先进的航测技术上,结合生成案例,本文对生产过程中无人机航测与大飞机航测的不同、无人机航测的一些特殊问题进行了分析探讨和解决,为我公司在无人机航测技术的掌握方面积累了经验。
1. 运用无人机测量的必要性
随着国内国际上自然灾害的多发与频发,尤其是重大自然灾害发生时,这是环境所致,也是人类污染所致,灾害往往带来重大的破坏和人员损失,而且造成灾害地区信息设备受到破坏,从而信息封闭,加之灾后的地区往往车辆人员不能及时到达,因此在灾害发生时及发生后,如何及时取得灾害信息及信息传输成为迫切的问题。这些活动可以用卫星来解决,也可以用载人飞机来解决。然而用卫星对地测量的方法,费用高、图像分辨率低、使用不灵活;而载人飞机不仅费用高,出航气候要求也很高,另外灾区上空飞行风险大,无法做到随时到达。若使用无人机来完成灾情监测与评估工作,无论是在留空时间、使用成本、耗费人力资源上,还是在恶劣环境作业要求、长时间飞行作业要求、人员生命安全要求上,或是在图像分辨率和工作效率上,无人機都优于载人飞机和卫星遥感。由于成本和气候条件等因素的制约,传统的卫星遥感和载人飞机只能满足部分空间数据信息的需求,而测绘型无人机系统具有一些独特的优势,它可在复杂地形、复杂天气下飞行,可以在许多特定的领域如高污染、高辐射、高风险领域执行飞行任务,因此,低成本、多用途的测绘型无人机系统技术在灾情监测与评估工作中具有必要性作用。例如:今年贵州省雨量较大,省内大小洪涝灾害时有发生。而由于贵州地形复杂多变,实地考察洪涝灾情不仅十分危险困难而且效率十分低下,利用载人飞机考察成本高居不下的同时还比较受到天气的影响,无人机采用低空飞行不受天气影响而且可以准确考察灾情,即使遇到环境恶劣的区域也不会造成人员伤亡。
2. 运用无人机测量在监测和评估工作中的优点分析
2. 1在国家重大自然灾害监测方面
利用无人机飞行机动、快速、覆盖范围大、任何条件皆可以到达等特点,迅速对灾情做出监测,将灾情速报一直是无人机自然灾害监测中的重要特点。以往我国在地震、洪涝、特大泥石流、雪灾、森林大火等灾情中都做了灾情监测工作,但是往往因为地理环境限制,无法做到最快最准确。而在近年来的灾害监测中,国家测绘局利用无人飞机测量技术,对灾区进行了监测。使得民政部国家减灾中心、中科院遥感所、地理所在较快的时间内完成了整个灾区的建筑物、公路、生态环境等几个大的灾情勘察监测报告,实现了快速摸清灾情的目的。无人机影像具有数量多、相幅小的特点, 抗震救灾时,无人机能够满足其在高度和分辨率上的实时性要求。因为它能够快速拼接影像,并且纠正和解译影像。分辨率较高并且完整的影像能通过低空遥感技术得到。要实现快速定量评估灾害以及解译相关影像,不仅要对灾害区域和对象的影像进行校正和增强处理,同时还要综合分析相关地理信息。
2.2在国家重大自然灾害评估方面
无人机最大的优势就是可以在恶劣的自然条件下,利用简单条件就可以低空飞行,获取影像数据。无人机目前已经具备影像获取、影像处理、影像生成等一套完整的航空摄影测量系统,马力的不断加大,使得无人机能够在很短时间飞到很多地方,以满足各类应急测绘和精准测绘的需求。无人机摄影图和航拍绘制的地形图,像使得国家职能部门可比其他观测手段更直观、更快速的进行灾后灾害评估。
2.3在国家重大自然灾害处理决策方面
灾害发生后,灾害处理决策部门最需要的就是灾区的一手监测、评估资料,但是往往灾区地形所限,人员无法到达灾情实地进行勘测,而无人机航测技术可以为灾害处理决策部门最快速的取得详实灾区影像资料、航片数据、灾后地形图等一手监测与评估资料,为灾害处理决策工作提供重要的依据。
2.4在国家减灾救灾科技支撑方面
在减灾救灾工作中最重要的便是建设灾害监测预警体系。完善灾害监测网络,加强地震、气象、水文、地质、森林草原火灾、等各类灾害监测系统建设。无人机航测系统可以为灾害监测预警系统提供灾后影像图和灾后地形图,实现国家减灾救灾重大需求与社会科技资源的有机结合,从而提高灾害预测预警系统的工作机能。
2.5在国家灾后重建工作方面
大灾后的灾区重建是一个庞大而复杂的系统工程,在这个过程中无人机航测技术提供的最新地形图将继续发挥巨大的作用。通过地形图,国家可以对整个灾区的灾情做出的全面评估,并可以结合灾区的地形、地质、社会经济等数据,对灾区重建选址和移民搬迁做出决策。
3. 案例分析-- 测区生产实践与作业方法
测区隶属于山东省烟台市。受大陆性季风影响,气候四季分明,冬长夏短,雨水多集中在夏季。测区内各种等级的公路均有分布,交通方便。烟台已经使用无人机成功对烟台港海阳港区建设基地工程、东港区海上疏港路工程等在建用海项目进行了遥感监测工作。测区海拔高程最高305m,最低150m。地貌以平、丘地为主。
3.1 项目的作业依据
本项目依据国家标准规范《1:500 :1000 :2000地形图航空摄影测量外业规范》GB/T 7931-2008、《1:500 :1000 :2000地形图航空摄影测量内业规范》GB/T 7930-2008及《测绘成果质量检查与验收》GB/T 23456-2009和无人机航测指导性文件《低空数字航空摄影规范》CH/Z 3005-2010、《低空数字航空摄影规范外业规范》CH/Z3004-2010和《低空数字航空摄影规范内业规范》CH/Z 3003-2010等。
3.2 数据源及预处理
3.2.1 数据源
本测区选用无人机航空摄影获取到的一套真彩色影像,航摄面积为53平方公里。航摄仪采用Canon EOS 5DMarkⅡ,焦距为:35mm,相幅大小为:5616×3744,像元分辨率为6.41um。影像地面分辨率为0.2米。
3.2.2 遥感影像预处理
非量测性相机应用于无人机航空摄影。为了恢复影像空中姿态,在进行空三测量时,相机像片畸变差需要矫正。此案例在收到航摄影像资料时已经完成了此项工作。
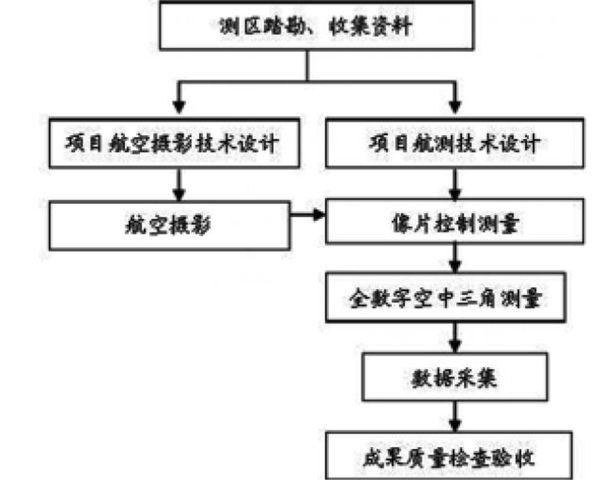
3.3 无人机航测运行作业总体过程
3.4 无人机航空摄影
本次将进行两次无人机航拍,相对飞行高度的数据由GPS领航计算。尽管在良好的飞行质量和影像质量下,影像拍摄清晰度不高,然而,1:2000的成图还是能够实现。一方面,照片色彩均匀,另一方面有良好的饱和度,真实地表达了地物信息。75%的航向重叠度,35%-45%的旁向重叠以及12度以内的旋偏角才能满足航摄飞行质量的要求。没有进行像片倾角的检查。
3.5 像片控制测量
3.5.1 像控点精度要求
0.2米应作为像控点和最近基础控制点平面位置间的最大允许误差,同时也应以此作为高程误差标准。
3.5.2 像控点布点方案
此项目在我司2010年进行的无人机航测课题试验基础上开展,因此布点方案我们也参考了试验结果,最终双模型布设方案得以确定。
3.5.3 像控点测量
像控点情况应通过对已收集像控点联测检核, 且需在像控测量前进行。之后,联测同时,4个控制点被加密用来实现后续测量。联测中,GPS静态相对定位和边连式布网被采用。最终,共测得10个已知点,4个新设点。观测时具体技术参数依据规范。通过计算,最弱点点位误差为0.035m,最弱边相对误差为1/45537m,满足像控测量要求。
本测区像控点采用GPS实时动态定位(RTK)的方法进行测量。GPS实时动态定位(RTK)测量使用5台GPS RTK接收机进行测量。充分利用已测控制点数据,采用室内求解转换参数,已知点上设置参考站的测量方法。为了保证精度,流动站不超过5公里,坐标精度在3㎝以内时记录数据,每个点重复测量三次取平均值为测量成果。
3.6 空中三角测量
在本项目中,SSK工作站对进行空三加密。其中,空三区域被分为两个加密部分,而加密方式为自动手动相结合。即自动匹配,测量和剔除,然后根据要求进行人工调整,保证在2/3个像素以内。加入外业像控点对本区大地定向,进行计算、检查,得出0.3米平面中误差和0.17米的高程中误差。根据规范GB/T 23236-2009,1:2000的要求达到。
3.7 数据采集
根据上述测量结果,我们进行单模型定向。然而,在此过程中,某些模型无法定向。第一架次和第二架次中,分别有29个和67个模型无法建立,占总比数分别为4%和9%, 同时测图定向点数量超出限制。原因应归于无人机的航拍质量。其中,飞行倾角,过大的旋偏角,弯曲的航线以及比例不一的像片都包括在内,这些因素往往会造成精度值低。鉴于此,我们认为应采取如下措施:在测图定向超限点的周围进行野外实测用来检核分析数据并进行必要的修正。但是,这在一定程度上增加了生产成本。
3.8 项目精度报告
根据1:2000精度要求对测绘产品检进行了高程精度的统计,统计了6幅DLG图,其中误差最大为0.36米,最小为0.27米,可以看出符合规范要求,但是从统计的结果看,粗差率比较高,有的达到了5%。平面精度一般可以达到,因此没有做平面精度检测。
4. 结论及建议
(1)无人飞行器测绘技术是集成了低空航空摄影技术、传感器技术和数据处理技术等多种关键技术的一门航空摄影测量技术。我们认为提高低空航空摄影技术是无人机航空摄影测量技术的关键所在;当然使用适当的无人机航摄影像的处理技术可以在一定程度上消除无人机航空影像不规则带来的影响。
(2)无人机航空摄影测量技术应用于地形图的生产存在不确定性,比如,区域网整体加密精度评定良好,单模型中误差也可能良好,但单模型定向精度就存在超限情况,也就是个别点的超限情况,在测图过程中表现为测图定向点和立体模型套合差大、接边误差大等。可以通过外业实测来验证精度。
(3)建议在利用无人机航测这种新技术进行航空摄影测量时,采用试验区的作业方法,即在确定布点方案前选取一定面积的试验区进行布点方案试验;
(4)建议利用无人机航空摄影测量技术进行地形图生产,尽可能在载人机不便或无法完成的情況下,由无人机来完成。如多块小面积、危险场所、远离机场或没有可供其起降场地的区域。总之,目前无人机航测技术应该体现在载人飞机航测技术的补充方面。
参考文献:
[1] 王聪华。无人飞行器低空遥感影像数据处理方法[J] 中国优秀硕士论文 2006;
[2] 范承啸,韩俊,熊志军,赵毅。 无人机遥感技术现状与应用[J] 测绘科学 2009,34(5):214-215;
[3] 陈新玺,李浩,张曼祺。 普通数码相机构像畸变差两种检较模型的比较[J] 北京测绘2005(4):50-54;
[4] 崔红霞,李杰,林宗坚,储美华。非量测数码相机的畸变差检测研究[J] 测绘科学2005,30(1):105-107;
[5] 王聪华,林宗坚。 UAVRS影像空中三角测量实验研究[J] 测绘科学 2007,32(4):41-43;
[6] 连镇华。无人机航摄相片倾角对立体高程扭曲的影响分析[J] 地理空间信息2010,8(1):20-22;
