医疗定位系统的精度测试方法研究
2015-10-21沈刘娉孙迎孙毅勇
沈刘娉 孙迎 孙毅勇


[摘 要] 利用计算机医学图像处理及三维可视化技术的空间三维定位导航系统已成为计算机辅助治疗领域的热门研究,该系统可对进入人体的医疗器械进行精确定位。为了对系统的核心指标定位精度进行验证,提出了定位系统的精度测试方法。通过平面和空间球面两种测试装置,分别使用平面测试算法和基于寻优算法设计的球面校准算法,自动计算定位系统的精度,从而实现全方位的性能评价。实验结果表明,定位系统的平均定位误差小于1mm。该测试方法有效可行。
[关键词] 定位精度;测试;医疗器械
中图分类号:R331 文献标识码: B 文章编号:2095-5200(2015)05-011-03
引言
利用计算机医学图像处理及三维可视化技术的空间三维定位导航系统已成为计算机辅助治疗领域热门研究。通过该系统可对进入人体的医疗器械进行精确定位,显著提高诊断及治疗效果[1-2]。
介入式医疗定位系统最核心性能指标就是定位精度。在患者体内高风险部位,很微小偏差都将可能造成非常严重后果[3]。为了对系统核心指标进行验证、判断其定位精度是否满足临床手术需要,本研究设计了测试算法及平台,用于系统精度测试。
1 精度测试原理
医疗定位系统能够在指定范围内精确定位,将与系统配套感应器放置于该范围内,可获取坐标信息,并将该数据发送回系统。利用坐标信息便可分析整个系统稳定度和精度。本研究分别通过基于平板和球面两种方式进行精度性能评价。其中,平板测试用于评价整个定位范围内精度性能;球面测试用于评价空间不同角度可能对精度产生影响。此外,通过在定位范围内放置常规手术器械,以模拟手术室环境,来评价环境对医疗定位系统影响[4]。
2 测试方案设计
2.1 平板测试
2.1.1 测试装置 本研究设计测试方法针对医疗定位系统平面定位精度进行分析与评价,于定位精度测试平板上加工打孔5×5方阵,共计25个孔,编号依次为1-25,见图1。为了尽可能减小测试误差,采用激光校准方式,测量出小孔两两之间距离,准确度等级MPE(maximum permissible error)为±4.5μm。此组距离值将作为平板测试过程中真值。
使用50cm厚垫块3块(其厚度取决于精度范围),置于测试平板下,可测试空间不同层高定位精度。
2.1.2 测试步骤 将定位精度测试平板置于一块50cm高垫块上,感应器置于编号为1孔内,通过软件采集第一个标测点,采样单位为100个数据。根据获取坐标信息,计算并显示出该点100个数据稳定度SD,设Xs为采集100个数据在X方向上标准差,Ys为采集100个数据在Y方向上标准差,Zs为采集100个数据在Z方向上标准差,则有下列计算公式:
将计算所得到距离值与定位精度测试平板激光校准所得到距离真值做比较,计算出两者之间偏差,便可判断整个医疗定位系统于50cm高处定位准确性。分别加高一层和两层垫块,重复以上标测点采集,可测得医疗定位系统于100cm和150cm高处定位准确性。
本测试采用自编数据采集与计算软件实现以上数据采集及稳定度与精度计算,同时输出测试报告。测试所得到数据用于评估医疗定位系统可达到精度。
2.2 球面测试
2.2.1 测试装置 本测试采用半球上有50个深插孔,如图2,每一个深插孔旁固定距离有一个浅插孔。使用带两个插杆分别装有传感器盖子,可将一个长插杆插入半球某一个深插孔内,另一个短插杆同时插入深插孔旁短插孔内,用于锁紧使得盖子和半球不能相对旋转移动。盖子上带有光学显影点,可通过光学定位装置获得光学显影点坐标值。此组坐标值将作为半球测试过程中真值。
2.2.2 测试步骤 将球面置于磁场范围内,定位系统运行正常。将一个盖子固定于球面上某一特定孔内作为参考点,另一个盖子插入标有编号为1孔内,采集数据。将盖子移至标有编号为2孔内并采集数据。以此类推,直至48个数据采集完成。
运行校准算法程序,计算定位系统平均定位误差。
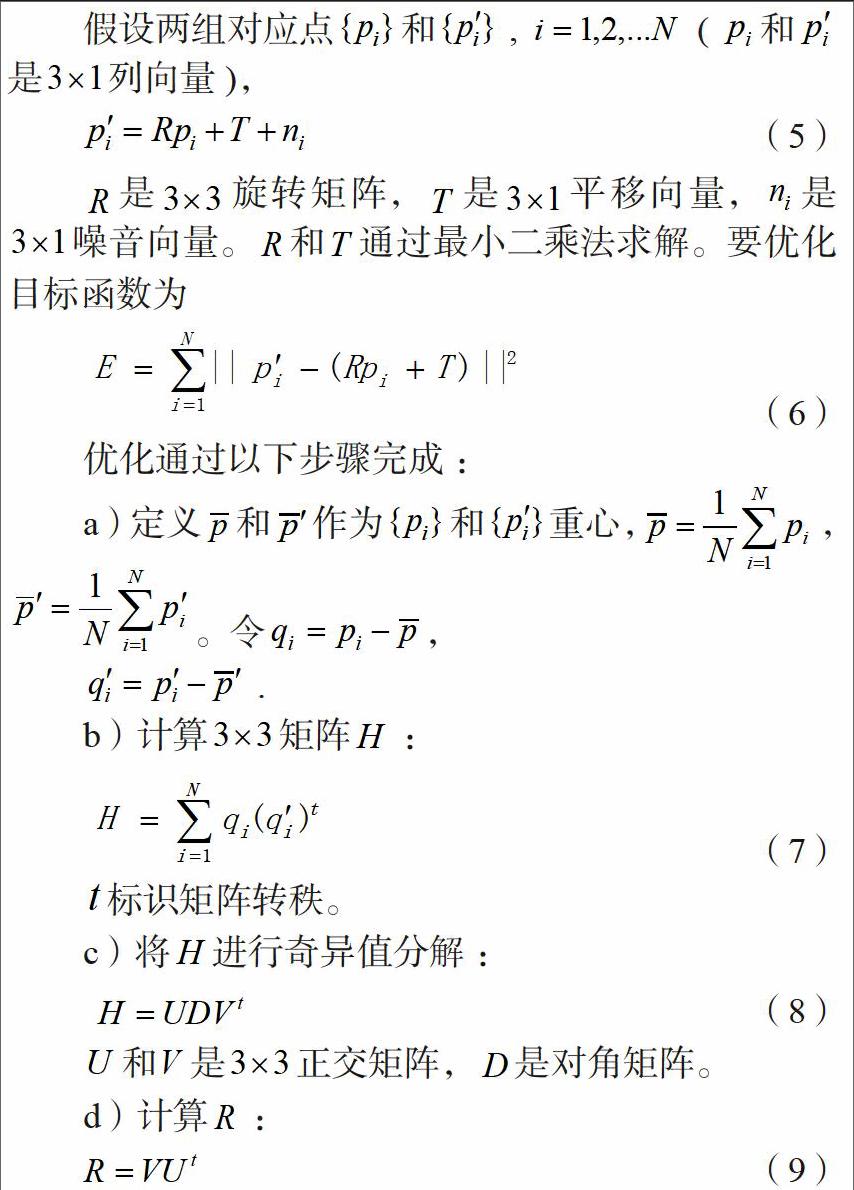
2.2.3 校准算法设计 将一个盖子插入某一个孔内,通过长短插杆将其锁定,使其相对半球无移动,作为参考点Sensor1,同时可以获得参考点感应器Sensor148组三维坐标,记为。通过光学定位装置获得另一个盖子上光学显影点坐标,得到48个三维坐标值作为半球孔相关真值坐标,记为,
48;盖子内带有Sensor2用于采集实时变化位置坐标,手动将装有Sensor2盖子依次插入48个插孔,通过感应器得到48组三维坐标,记为,48。
盖子上光学显影点相对于Sensor2有一个固定坐标,记为,。光学显影点相对于电磁定位系统零点坐标为,而相对于Sensor1坐标为。
(2)通过(1)得到X值,可计算得到变换误差。之后通过在6个方向上搜索邻域,并重新计算6个方向上得到X和e,找到e值最小方向,以此为新起点继续以上搜索过程,直到e不再减小。此算法收敛后,将得到估算出与,同时得到收敛后e。
收敛后e包含了光学定位系统误差、电磁定位系统误差及每次进行插孔误差。考虑到光学定位系统误差远小于电磁定位系统误差,插孔与插杆之间配合紧密且通过两根插杆固定,因此误差基本可以反映电磁定位系统误差。
2.3 环境因素对精度影响测试
由于医疗定位系统在手术室环境中使用,该环境中不可避免地会存在金属材料手术器械或其他设备。最安全方法就是避免金属干扰物在医疗定位系统附近,但这使得其在医学领域应用受到很大限制,因此需要评价手术器械对其精度影响[6-8]。
定位失真不仅与金属类型有关,还与它大小、形状、位置和角度有关。因此,仅针对某一种典型情况作分析[9-10]。通过放置各种手术刀和大金属薄板,分别模拟一般手术室普遍存在手术器械和手术床,将各种金属器材放置于医疗定位系统附近,重复2.1测试,并与未放置手术器械时测试结果进行对比。
3 测试及结果分析
3.1 平板测试
将感应器依次放置于25个孔内,在每一层高度采集得到25组数据,计算得到系统稳定度与距离偏差均值,结果如下表1所示:
由以上数据可知,随着高度增加,稳定度和距离偏差性能指标均有一定程度下降,但完全可接受。测试结果表明该系统定位精度指标满足接收标准SD<=0.2和D<=1mm。
3.2 基于球面校准算法
使用半球测试工装,固定一个Sensor在某一小孔作为参考,另一个盖子依次遍历半球工装上所有小孔,采集得到48组数据,计算其与真值间平均配准误差Avg = 0.646mm,表明该系统定位精度指标满足接收标准Avg<=1mm,与平板测试结果基本一致。
3.3 环境因素影响测试
在精度测试范围内放置金属物,重复2.1测试,高度设置为150mm,得到数据为无金属物环境:稳定度0.038,距离偏差0.459mm;放置金属物环境:稳定度0.042,距离偏差0.959mm。
金属干扰测试选择高度为150mm位置,该位置为磁场精度范围内最差位置,即测得结果为最坏情况下能够达到精度。测试数据结果表明,金属物对定位精度有一定影响,但仍然满足SD<=0.2和D<=1mm接收标准。
4 结论
本研究设计了医疗定位系统精度测试方法,通过两种方式对医疗定位系统稳定度和精度进行了分析评价,一种为基于寻优算法设计球面校准测试方法,另一种为基于平板测试方案,两者结果基本一致。
通过上述测试结果分析,可知医疗定位系统自身精度非常高,平均定位误差小于1mm,能够满足SD<=0.2和D<=1mm接收标准。通过环境因素测试,得知手术器械对医疗定位系统精度干扰可接受,该系统完全适用于手术环境。其他大型医疗设备对其精度影响需要作进一步地研究分析。
参 考 文 献
[1] 杨向东,朱森强,徐静,等.医疗磁定位器精度标定与评价[J].机械设计与制造,2008,(2):92-94.
[2] 向茜,王世庆,李建,等.6D电磁定位导航系统研究[J].科技信息,2014,(15):18-19.
[3] 李然,王聪,冯朝坤,等.电磁定位系统测量误差校正技术研究[J].电光与控制,2014,21(4):81-85.
[4] D.D. Frantz, A.D. Wiles, S.E. Leis et al. Accuracy assessment protocols for electromagnetic tracking systems[J].Physics in medicine and biology,2003,48(14):2241-2251.
[5] RIVEST-HENAULT D,SUNDAR H,CHERIET M.Non-rigid 2d/3d registration of coronary artery models with live fluoroscopy for guidance of cardiac interventions.[J].IEEE Trans Med Imaging,2012.
[6] Z.Yaniva, E. Wilson, D. Lindisch et al. Electromagnetic tracking in the clinical environment.[J].Medical Physics,2009,36(3):876-892.
[7] B. Wang, J.D. Tward, B.J. Salter et al. An evaluation of interference of inflatable penile prostheses with electromagnetic localization and tracking system[J].Medical Physics,2012,39(8):4807-4811.
[8] E. Wilson, Z. Yaniv, H. Zhang et al. A hardware and software protocol for the evaluation of electromagnetic tracker accuracy in the clinical environment: a multi-center study[C]. Conference on Medical Imaging 2007: Visualization, Image-Guided Procedures pt.2; San Diego,CA(US).2007:65092T.1-65092T.11.
[9] A.B.Mor, J.Cipriani, B.Jaramaz, A.M.Digioia et al. Accuracy testing of electromagnetic tracking systems[C].Computer assisted orthopaedic surgery.2006:390-393.
[10] S. R. Kirsch,C. Schilling,G. Brunner et al. Assessment of metallic distortions of a electromagnetic tracking system [C].Visualization,Image-Guided Procedures,and Display.2006:61410J.1-9.
