基于PSCAD的微电网孤网模式建模与仿真
2015-10-21商士民潘庭龙纪志成
商士民, 潘庭龙, 纪志成
(江南大学物联网工程学院,江苏无锡214122)
基于PSCAD的微电网孤网模式建模与仿真
商士民, 潘庭龙*, 纪志成
(江南大学物联网工程学院,江苏无锡214122)
针对传统下垂控制受微网线路阻杭因素的影响,无功功率难以实现精确的分配问题,采用一种无功-电压微分(Q-d U/d t)下垂控制。该策略是基于电压幅值变化率的电压补偿控制方法,实现无功功率的精确分配。在PSCAD中分别建立该方法的控制系统模型,并对系统孤网运行模式进行仿真研究,结果验证了控制系统模型的有效性。
微电网;下垂控制;动态仿真
随着分布式发电渗透率的增加,微电网在电网中的作用越来越大,当大电网发生故障时,微电网与大电网断开,独立运行,保证重要负荷继续供电,孤网运行模式能提高经济效益,改善用户用电水平。微电网是由微电源(Micro-Source,MS)与负荷、储能装置、控制装置等结合起来,形成单一的可控小型电力系统,提供电能和热能给用户,也可简称为“微网”[1-3]。因其能充分协调分布式电源与大电网之间的功率潮流,被越来越多的专家学者所重视,并在很多国家得到了广泛应用[4-5]。孤网运行是微电网的重要特征,是提高微电网内重要负荷供电可靠性的强有力保证。因此,对微电网的孤网控制系统进行准确的建模、仿真和分析其动态特性,对发展微网的高级控制策略具有重要意义。
在微网系统中,传统的有功功率/频率下垂控制和无功功率/电压下垂控制一般在下垂控制的分布式发电中被采用[6-9]。由于分布式微源的复杂性和多变性以及下垂控制对输出阻抗的依赖性,传统的下垂控制方法很难实现功率的精确分配。为此国内外学者对传统下垂控制方法进行了改进,在线路阻抗不匹配时,对电压下垂系数和阻抗系数进行修正,可以实现无功功率的精确分配[10]。针对包含多个分布式电源的微网在孤岛运行模式下的功率分配问题,提出一种下垂特性和平均功率相结合的控制方法[11]。针对传统下垂特性控制方法的不足,增加P-δ下垂控制修正和Q-U下垂控制修正项,可有效跟踪功率变化的动态特性[12]。
实际运行中每个微电源的线路阻抗参数通常是无法匹配的,仍然还会存在无功功率分配不平衡以及负荷点电压过低的问题。文中采用Q-˙V下垂控制方法,这种方法能够克服逆变器之间线路阻抗不匹配的影响,并且能够实现更好的无功功率均分。文中以PSCAD为仿真环境,对微网系统进行控制系统建模,仿真验证采用控制策略的正确性和有效性。
1 微网结构
作为研究对象,文中涉及的微网结构如图1所示。
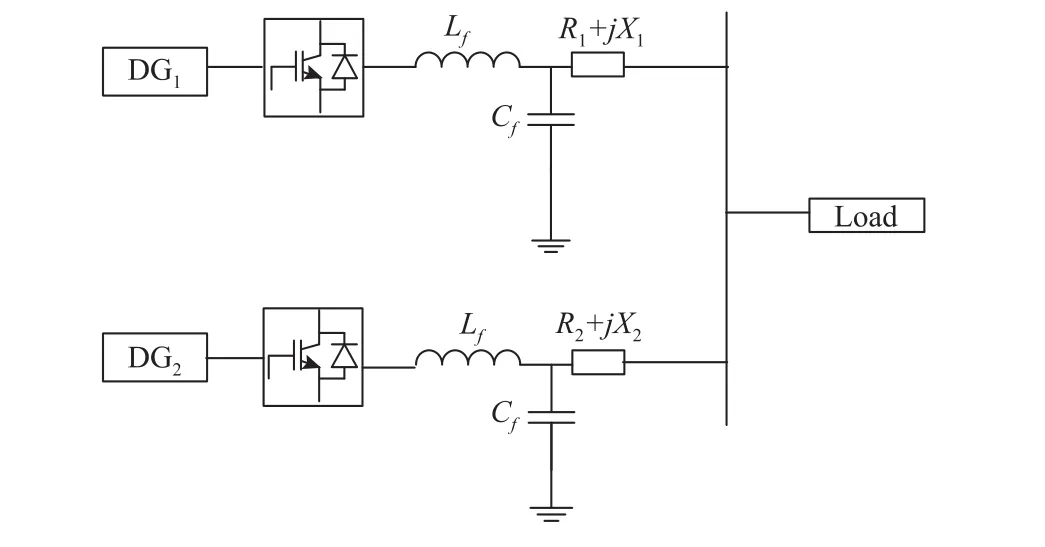
图1 微网的结构Fig.1 Block diagram ofm icro-grid
图1中,DG1和DG2分别为两个分布式微源,文中重点是研究微电网的控制系统,为了简化研究对象,均以理想直流电源代替分布式电源,两个微源分别经过采用SPWM调制的逆变器逆变为三相交流电,然后经过LC滤波器滤除高次谐波,各个微源支路的线路阻抗为Ri+jXi,Load为网络负载负荷。
微网通常有并网运行和孤岛运行两种运行模式。并网运行是指微网与大电网相连接,与主配电网进行电能交换,由大电网补给微源自身发电的不足功率或吸收多余的功率。孤岛运行又称离网运行,是指当检测到电网故障或计划需要时,与主配电网断开,由微源、控制系统和储能系统构成一个独立的小型供电系统对用户负载进行供电。
文中微电网控制策略为:孤岛模式下两微源均采用下垂(Droop)控制。下文将进行Droop控制建模以及仿真分析。
2 传统的功率下垂控制建模
传统的下垂(Droop)控制是一种电力电子逆变器无互连线的并联控制技术,它与同步发电机的一次调频类似,通过解耦下垂特性曲线中的变量来调节微网系统频率和电压幅值,进行有功和无功的分配[13-14]。这种控制方法主要模拟传统发电机的控制特性,在传统电网中发电机的转子频率会一直变化,直到它发出的有功功率满足负荷的需求,而电压就是通过无功功率平衡来维持。在微网中,通常采用有功-频率(P-f)和无功-电压(Q-U)这样关联的下垂控制方法[15]。
当微源输出有功功率增加时降低其频率,当微源输出无功功率增加时降低电压幅值;反之则分别增大频率和电压幅值。根据下垂特性曲线可得到频率和电压的下垂控制方程为[16-17]

式中:fn和Un分别为逆变器i输出角频率和电压幅值的额定值;kpi和kqi分别为频率、电压下垂系数;pn和Qn分别为有功功率和无功功率在额定频率下的输出功率;Qn一般设为零;pi和Qi分别为实际测得逆变器输出的有功和无功功率。P-f,Q-U型下垂特性曲线如图2所示。

图2 下垂控制特性曲线Fig.2 Droop control characteristic curves
采用电力电子逆变器接口的微源下垂控制结构如图3所示,其中外环功率控制包含3个部分,如图4所示。
在PSCAD中利用功率测量器实测出微源输出的瞬时功率,然后通过低通滤波滤除高频分量得到平均功率;平均功率、额定输出功率、系统的额定频率以及电压幅值作为下垂控制的输入,通过下垂控制得到输出电压频率和幅值的参考值;参考值通过电压合成产生三相对称的参考电压。参考电压经变换后作为电压电流双环控制器的输入,dq0坐标系下P-f和Q-V多环控制的目的主要是提高控制器的性能,改善逆变器的输出电压幅值,多环控制后得到的可控正弦调制信号输入到SPWM模块中。

图3 下垂控制结构Fig.3 Block diagram of d roop control

图4 有功和无功功率控制结构Fig.4 Block diagram of power control
当微网中多个分布式电源并联时,微源可采用传统的频率有功功率(P-f)下垂控制,依据各自的容量实现有功功率的平均分配,输出有功功率与各自的容量成正比,不受线路阻抗压降的影响。因为微网系统的频率是唯一的,所以P-f控制能够使逆变器输出的有功功率始终是均匀分配的。但是传统的下垂控制中Q-U控制会产生无功功率分配的误差,因为无功的分配不仅与分布式电源的容量有关,还与传输线路的压降有关,这里只要对下垂控制进行改进,补偿线路上产生的压降就能使并联的各微源输出的电压相等,就能达到传统下垂控制的效果,实现无功功率的均分。
3 无功功率-电压微分(Q)下垂控制建模
在低压微网中,有功-频率下垂控制影响有功功率分配的主要因素还是功率角,功率角和频率有关,不受线路阻抗差异的影响,通过调节频率下垂特性使频率维持在合理范围内,有功功率就可以得到有效的分配。因此,文中主要针对的是无功功率的合理分配问题。微网中无功功率的来源主要是感性负载或者容性负载。针对无功功率的不同需求,功率管理系统通过多种控制方法并加入无功补偿器,保证系统中无功的平衡。
在传统的Q-V下垂控制中,无功功率的控制主要是通过逆变器进行控制的,微源输出的无功功率是线路阻抗和下垂参数共同影响的,并且通常在不稳定的运行点。为了克服线路阻抗对无功潮流的影响,文中引入一个无功功率输出和电压幅值的动态关系方程,采用改进型Q下垂控制,用代替V,对电压进行补偿,使电压幅值保持在合理的稳定状态。控制器如图5所示。文中同时引入电压导数值恢复机制,使电压导数等于0,在稳定状态,这样电压值V就能够维持在一个常值。

这里ni是Q˙下垂系数,为达到的额定值,设定在0 V/s,τ为调节时间t内具体的时间点;QoX是无功设定值和对应,主要是和无功容量相关。Voi是标准相位电压幅值,是输出电压幅值命令值。在稳定状态时,所有的逆变器工作在相同的值,这样可以得到式(3),如果电压导数下垂系数按照式(4)设定,那么从式(3)和式(4)可以得到每个逆变器输出的无功功率可以满足式(5)方程:


图5 Q控制器Fig.5 Control block diagram of Q dot

图6 Q˙控制的下垂特性Fig.6 Droop characteristic of Q-˙V control
由图6可知,所有微电源的额定电压微分值d Voi/d t最终的稳定值都相等,但若d Voi/d t值不为0时,则输出电压不稳定。文中提出一种电压补偿控制方法使电压达到稳定状态,电压导数必须经过调整恢复到0。定义控制机制可表述如下:

这里kresi是电压导数恢复增益,QRXi是额定无功功率增益。为了简化,提出式(7)和式(8)两种假设。式(7)是为了确保无功功率均分,式(8)为了达到稳定状态。

4 微网模型仿真与分析
仿真参数如下:(1)DG1的额定功率Pn1= 2.5 kW,传统下垂控制系数kp1=-1e-5,kq1= -3e-4,=50 Hz=380 V,滤波器参数Lf= 0.6 mH,Cf=1 500μF,Rf=0.01Ω,线路阻抗R1+ jX1=0.064+j0.001,电压环控制器参数kV-P=10, Ti=0.01 s,电流环控制器参数kI-P=10;(2)DG2的额定功率Pn2=5 kW,下垂系数kp2=5e-6,kq2= 1.5e-4,线路阻抗R2+jX2=0.064+j0.002,其他参数和DG1相同。无功电压微分(Q-˙V)下垂控制系数n1=-3e-3(V/Var),n2=-6e-3(V/Var),Qo1= 400 Var,Qo2=200 Var,Vox=380 V,Kres1= Kres2=0.5(1/V),QRX1=800 Var,QRX2=400 Var。在0~2 s有功负荷为10 kW,无功负荷15 kVar,在2 s时有功负荷变为15 kW,无功负荷变为30 kVar,在3 s时又恢复为初值。
图7为传统下垂控制下的仿真波形图。从仿真结果可以看出,在不同线路阻抗下,随着负荷需求的变化,DG2的有功功率始终是DG1有功功率的2倍,即微源的有功功率始终能按容量平衡分配,而当负荷功率增加时,DG1和DG2不能按容量平衡分配无功功率,功率分配精度低;而且负载增加时,负载处的电压明显降低,其值低于最低电压要求,这对敏感性负载来说是不允许的。
图8为微网系统应用文中提出的改进的下垂控制时的运行仿真结果。从图中可以看出,当负载增加时,无功功率按各自容量实现了平衡分配,负荷处的电压始终大于360 V,达到最低电压的要求。

图7 传统下垂控制下的微网运行仿真Fig.7 Operation results of m icro-grid under traditional droop control

图8 改进型下垂控制下的微网运行仿真Fig.8 Operation results ofm icro-grid w ith im proved droop control
5 结 语
分析微网传统下垂控制策略的不足之处受线路参数的影响,线路参数不匹配时,无功功率在微源中不能均衡分配。基于电压补偿原理,通过无功-电压微分(Q-˙V)的下垂控制方法来实现无功功率的合理分配。通过仿真比较了传统下垂控制和改进的下垂控制的微网运行特性,验证了改进的下垂控制能保证微网系统频率始终维持在限定的范围内,并且在不同线路阻抗下提高了无功功率的分配精度。
在包含风电光伏等多微源的实际微网中,频率稳定性问题和电压稳定性问题是微网稳定性控制的重要内容,文中改进的下垂控制预计可以提高实际微网运行的稳定性。有关微网孤岛运行模式向并网运行模式的平滑切换有待后续研究。
[1]刘霞.含多种分布式电源和储能的微电网控制技术[D].杭州:浙江大学,2012.
[2]王成山,王守相.分布式发电供能系统若干问题研究[J].电力系统自动化,2008,32(20):1-4,31.
WANG Chengshan,WANG Shouxiang.Study on some key problems related to distributed generation systems[J].Automation of Electric Pawer Systems,2008,32(20):1-4,31.(in Chinese)
[3]王成山,肖朝霞,王守相.微网综合控制与分析[J].电力系统自动化,2008,32(7):98-103.
WANG Chenshan,XIAO Zhaoxia,WANG Shouxiang.Synthetic control and analysis of microgrid[J].Automation of Electric Power Systems,2008,32(7):98-103.(in Chinese)
[4]郭力,王成山.含多种分布式电源的微网动态仿真[J].电力系统自动化,2009,33(2):82-86.
GUO Li,WANG Chengshan.Dynamical simulation onmicrogrid with different types of distributed generations[J].Automation of Electric Power Systems,2009,33(2):82-86.(in Chinese)
[5]韩少宏.基于可再生能源的微网应用技术研究[J].内江科技,2013(1):114-115.
HAN Shaohong.Research ofmicro-grid application technology based on renewable energy[J].Journal of Neijiang,2013(1):114-115.(in Chinese)
[6]牟晓春,毕大强,任先文.低压微网综合控制策略设计[J].电力系统自动化,2010,34(19):91-96.
MOU Xiaochun,BIDaqiang,REN Xianwen.Study on control strategies of a low voltage microgrid[J].Automation of Electric Power Systems,2010,34(19):91-96.(in Chinese)
[7]LEE C T,CHU C C,CHENG P T.A new droop control method for the autonomous operation of distributed energy resource interface converters[C]//Proc Energy Conviation Congress and Exposition.Atlanta,GA:IEEE,2010:702-709.
[8]Chandrokar M C,Divan D M,Adapa R.Control of parallel connected inverters in standalone AC supply systems[J].IEEE Trans Ind Appl,1993,29(1):136-143.
[9]Chandrokar M C,Divan D M,Banerjee B.Control of distributed UPS systems[C]//Proc IEEE Power Electron Specialists Conference.Taibei:[s.n.],1994:197-204.
[10]王鹤.含多种分布式电源的微电网控制策略[J].电力自动化设备,2012,32(5):19-23.
WANG He.Control strategy ofmicrogrid with different DG types[J].Automation of Electric Power Systems,2012,32(5):19-23. (in Chinese)
[11]张建华,黄伟.微电网运行控制与保护技术[M].北京:中国电力出版社,2010:113-116.
[12]高范强,王平,李耀华,等.基于时变相量小信号模型的逆变器并联控制系统分析与设计[J].中国电机工程学报,2011,31 (33):75-84.
GAO Fanqiang,WANG Ping,LIYaohua,et al.Analysis and design of for paralleled inverter system based on the small bignal model using time-varying phasor[J].Proceedings of the CSEE,2011,31(33):75-84.(in Chinese)
[13]CHENG Ding,Lo K L.Micro-grid control and management of state transition period[C]//2012 47thInternational Universities Power Engineering Conference.London:[s.n.],2012:1-5.
[14]汪诗怡.国际上微网和分布式电源并网标准的分析研究[J].华东电力,2013,41(6):1170-1175.
WANG Shiyi.Worldwide standards for integration ofmicrogrids and distributed generations[J].East China Eletric Power,2013, 41(6):1170-1175.(in Chinese)
[15]李福东,吴敏.微网孤岛模式下负荷分配的改进控制策略[J].中国电机工程学报,2011,31(13):18-25.
LIFudong,WU Min.An improved control strategy of load distribution in an autonomousmicrogrid[J].Proceedings of the CSEE, 2011,31(13):18-25.(in Chinese)
[16]王聪颖.微电网运行控制仿真分析[D].哈尔滨:哈尔滨工业大学,2011.
[17]唐西胜,邓卫,李宁宁,等.基于储能的可再生能源微网运行控制技术[J].电力自动化设备,2012,32(3):99-108.
TANG Xisheng,DENGWei,LINingning,et al.Control technologies ofmicro-grid operation based on energy storage[J].Electric Power Automation Equipment,2012,32(3):99-108.(in Chinese)
(责任编辑:杨 勇)
M odeling and Simulation of M icro-Grid Isolated M ode Based on PSCAD
SHANG Shimin, PAN Tinglong*, JIZhicheng
(School of Internet of Things Engineering,Jiangnan Nniversity,Wuxi214122,China)
In the micro-grid island mode,the frequency and voltage of the system are important technical control parameters.Traditional droop control can hardly realize the accurate power assignment in micro-grid because of some influencing factors,such as the characteristics of line impedance,a strategy of reactive power-voltage differential(Q-d U/d t)power control is applied.The voltage compensation controlmethod based on the voltage amplitude variation rate(d U/d t)is applied to realize the accurate reactive power assignment.The above control system model is established in the PSCAD,and the isolated operation model is studied,the results validate the effectiveness of the control system correctly.
micro-grid,droop control,dynamic simulation
TM 76
A
1671-7147(2015)03-0299-06
2014-12-17;
2015-01-18。
江苏省自然科学基金项目(BK2012550);江苏省高校科研成果产业化推进项目(1256010241120850)。
商士民(1988—),男,安徽蚌埠人,电气工程专业硕士研究生。
*通信作者:潘庭龙(1976—),男,江苏建湖人,教授,硕士生导师。主要从事新能源控制技术、功率变换技术等研究。Email:tlpan@jiangnan.cdu.cn
