对流层延迟对高超声速飞行器定位误差的影响
2015-10-21杨恒进王荣荣南京邮电大学通信与信息工程学院江苏南京210009
杨恒进,王荣荣(南京邮电大学 通信与信息工程学院,江苏 南京 210009)
对流层延迟对高超声速飞行器定位误差的影响
杨恒进,王荣荣
(南京邮电大学 通信与信息工程学院,江苏 南京 210009)
对流层延迟与对流层的折射率有关,且随着卫星仰角的减小而增加,在卫星仰角为5°时会产生25m左右的误差,给GPS导航定位带来不利的影响。系统地分析了对流层延迟特性并对常用的误差修正模型进行了比较。基于Saastamoinen模型提出了一种简易的对流层延迟修正模型,该模型不需测量气象参数,且实验结果表明,简易修正模型可以很好地消除对流层影响,有效地提高了GPS导航定位系统的精度。
对流层延迟;GPS;修正模型
0 引言
全球定位系统(Navigation Satellite Timing And Ranging Global Position System,GPS)由32颗卫星组成,可以为全球GPS用户提供全天候的连续的三维坐标位置、速度以及时间信息[1-3]。
对流层是离地面高度50km以下的大气层,包括对流层和平流层。GPS穿过对流层和平流层时,其传播速度将发生变化,传播路径将发生弯曲,从而产生额外的路径延迟,称为对流层延迟。对流层延迟与信号的工作频率有关,研究表明,对于15GHz以内的微波信号,其延迟可以忽略不计,但是对于工作在1 227.6MHz和1 575.42MHz的GPS信号而言,即使当GPS在天顶方向运行时,由对流层引起的偏差也可以达到2~3m。
目前常用的对流层延迟修正模型有Hopfield模型、Saastamoinen模型以及它们的改进模型[4-6]。本文在分析对流层延迟特性的基础上,提出了一种简易的对流层修正模型,该模型不需要测量观测站的气象参数,且实验结果表明,该模型能很好地消除对流层延迟误差的影响,可以有效地提高GPS系统的导航定位精度。
1 对流层延迟分析
对流层引起的额外路径延迟是GPS信号的实际传播距离S与几何路径ρ之差,如图1所示。

图1 对流层延迟示意图

若用△Dtrop表示对流层延迟,则:其中,n(S)表示对流层折射率。上式右端第一项为信号速度变化引起的延迟,其对应的时间称为对流层时延;第二项是对流层导致的GPS信号传播路径弯曲,其值为毫米级,可以忽略不计。
对于波长很短的电磁波来说,对流层有色散效应,此时可以利用双频测距仪来消除对流层延迟。但是GPS信号波长很长,不存在色散效应,因此只能通过计算式(1)积分来计算对流层延迟,即需要求出传播路径上各处的大气折射系数N。令:其中,N为大气折射系数,与气体温度和气压有关。80%以上的对流层延迟是由大气中的干燥气体引起的,称为干分量,其余延迟是由水蒸气引起的,称为湿分量,其折射系数分别用Nd、Nw,表示,则:其中,P、T、e为大气压力(mbar)、温度(K)和水汽分压(mbar)。由式(3)可知,若要求解对流层延迟,则需要求出GPS信号传播路径上各处的大气压力、温度以及水汽分压,这是不现实的,因此必须建立适当的模型来近似求得对流层延迟。


2 常用对流层延迟修正模型
常用的对流层延迟修正模型有 Hopfield模型和Saastamoinen模型,这些模型在一定情况下可以有效地修正对流层延迟,但是在观测站环境条件变化时会产生很大的偏差。
2.1 Hopfield模型


该模型是Hopfield在1969年根据实测数据得到的,该模型假设大气温度下降率为一常数:即观测站高程每升高1km,温度就下降6.8℃。其天顶方向干延迟δdz和湿延迟δwz经验公式分别为:其中,P0、T0、ew、Hd、Hw和h分别为地面气压(mbar)、地面温度(K)、观测站水汽压(mbar)、干大气层顶高、湿大气层顶高和测站在大地水准面上的高度(m);k1、k2、k3为常参数,它们的经验值可取为:k1=77.6K/mbar,k2=71.6K2/mbar,k3=3.747×105K2/mbar。

将式(7)和式(8)以及k1、k2、k3带入式(5)和式(6)可以得到对流层天顶干延迟和湿延迟:

2.2 Saastamoinen模型
该模型也是针对观测站天顶方向的对流层延迟进行修正,其干分量和湿分量延迟分别为:

式中各符号的含义与Hopfield模型一致,如果考虑观测站的位置,则总的对流层延迟可以表示为:其中,φ为观测站纬度,h为观测站高程,P为高程h处的气压。

由于上述两种模型仅能对观测站天顶方向的对流层延迟进行修正,因此限制了其适用范围,对位置快速变化的高超声速飞行器并不适用。
3 Saastamoinen简易模型
飞行器以高超声速在空间进行飞行时,其与GPS导航卫星之间的相对位置在不断地变化,因此卫星的仰角也在不断变化。此时如果仅对GPS信号天顶方向的对流层延迟进行修正,肯定会给导航定位带来很大的误差,所以迫切需要建立与观测站位置也即飞行器位置有关同时能适应不同GPS仰角的对流层延迟修正模型。

在对Saastamoinen模型进行修正后,可以得到如下模型:其中,f(h)为高程修正函数,z是卫星的天顶距,其余符号含义与Hopfield模型相同。在获得飞行器高程及环境参数后,根据该简易模型便可求出参与导航定位的任意仰角的GPS信号的对流层延迟。
4 模型对比
4.1 模型参数选择
上述三种模型的参数均可以离线得到,对于气压和温度 P0、T0,可以取海平面标准气压和温度为参考值,即P0=1 013.25 mbar,T0=291.16 K。

高程h处大气的温度、大气压力、水蒸气压力分别为:其中,RH=RH0×exp(-0.000 639 6×h),RH0=50%。
图2给出了文中三种模型在天顶方向上对对流层延迟的修正效果随观测站高程变化的曲线,对于Saastamoinen模型,取观测站纬度为南京新街口地理纬度32°02′。

图2 天顶方向对流层延迟修正对比
由图2可以看出,卫星对流层延迟随高程的增加而不断减小,当观测站高程为0m时对流层延迟可达到2.5m,在高程为40km时对流层延迟几乎可以忽略不计。
GPS卫星仰角大于15°时即为可见卫星,因此若高超声速飞行器捕获到此颗信号,该卫星便可与其他卫星一起对飞行器进行导航定位。图3给出了观测站高程为0m时,简易模型对对流层延迟的修正效果随卫星仰角变化的曲线。可以看出,在卫星仰角小于30°时,对流层延迟随卫星仰角的增加而急剧下降。在卫星仰角等于5°左右时,对流层延迟可以达到25m,与参考文献[6]数据一致。当卫星仰角增加到30°左右时,对流层延迟减小到5m左右,此后随着卫星仰角的增加,对流层延迟缓慢减小。

图3 对流层延迟随卫星仰角的变化曲线
4.2 高超声速实验验证
为了验证采用简易模型对对流层延迟的修正效果,本文进行了高超声速实验验证,飞行器的飞行速度设为10马赫。由于飞行器的速度非常快,其定位误差自然会很大,因此本文采用卡尔曼滤波分别对跟踪结果和定位结果进行处理,在进一步减小定位误差的基础上分析简易模型对对流层延迟修正的效果。为了对高超声速飞行器进行实时的导航定位,仿真时每隔0.1s便更新一次飞行器位置,仿真总时间为25s。仿真结果给出了高超声速飞行器在地球坐标系中三个坐标分量的误差,分别如图4、图5和图6所示。
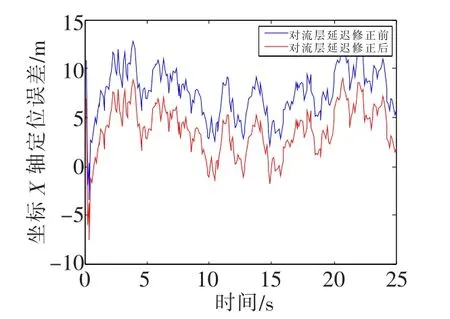
图4 简易模型对X轴定位误差修正效果

图5 简易模型对Y轴定位误差修正效果

图6 简易模型对Z轴定位误差修正效果
可以看出,模型修正后,各坐标轴的定位误差都有所减小。其中图4中定位误差由均值7.6m修正为3.7m,图5中定位误差由均值10.7m减小到3.7m,图6中定位误差由均值8.9m减小到4.4m,可见修正效果接近70%,因此大大提高了GPS导航卫星对高超声速飞行器的定位精度。
5 结论
本文提出了一种简易的对流层延迟修正模型,该模型不需要实时测量目标站的气象参数,仅根据目标站的高程以及可见GPS导航卫星仰角就能对对流层延迟误差进行估计,通过高超声速飞行器仿真实验可以看出,本文的简易对流层延迟模型可以很好地修正对流层延迟误差,且效果达到70%左右,大大提高了GPS导航卫星的定位精度,这对高动态飞行器的导航定位是难能可贵的。
[1]唐学术.高动态GPS接收机的捕获与跟踪算法研究[D].北京:北京理工大学,2008.
[2]游广芝.GPS导航定位中的误差分析与修正[D].哈尔滨:哈尔滨工业大学,2007.[3]龚真春,陈安宁,李平,等.GPS动态定位中自适应卡尔曼滤波方法的应用研究[J].测绘通报,2006(7):9-12.
[4]PARKINSON B W,SPIKLER JJ.Globalpositioning system:theory and application[M].American Institute of Astronautics and Aeronautics,1996.
[5] SAASTAMOINEN J.Contributions to the theory of atmospheric refraction[J].Bulletin Géodésique,1972,105 (1):279-298.
[6]ALTSHULER E E.Tropospheric range-error corrections for the globalpositioning system[J].IEEE Transactionson Antennas&Propagation,1998,46(5):643-649.
Impacts of troposphere delay on high speed aircraft
Yang Hengjin,Wang Rongrong
(College of Communication and Information Engineering,Nanjing University of Posts and Telecommunications,Nanjing 210009,China)
GPS signal undergoes an additional time delay due to the index of refraction.The time delay produced by the troposphere increases with decreasing elevation angle and approaches a value corresponding to a range error of about 25 m for an elevation angle of 5 degree.The characteristics and error correction model of troposphere delay are systematically investigated.At the same time,a simple troposphere delay model is proposed based on Saastamoinen model.Simulation results indicate that this simply model can effectively eliminate troposphere delay and improve GPS positioning accuracy without the actual measured meteorological parameters.
troposphere delay;GPS;correction models
TN911.22
A
1674-7720(2015)20-0051-03
杨恒进,王荣荣.对流层延迟对高超声速飞行器定位误差的影响[J].微型机与应用,2015,34(20):51-53,60.
2015-05-26)
杨恒进(1989-),男,硕士研究生,主要研究方向:无线移动通信。
王荣荣(1990-),男,硕士研究生,主要研究方向:无线移动通信。