基于STM32F407的永磁同步电机位置估计*
2015-10-20朱丹丹陈小平苏州大学电子信息学院江苏苏州5000南京南瑞集团江苏南京0000
朱丹丹,陈小平,檀 永(.苏州大学 电子信息学院,江苏 苏州 5000;.南京南瑞集团,江苏 南京 0000)
基于STM32F407的永磁同步电机位置估计*
朱丹丹1,陈小平1,檀永2
(1.苏州大学电子信息学院,江苏苏州215000;2.南京南瑞集团,江苏南京210000)
采用以Cortex-M4为内核的STM32F407作为主控制器,根据空间矢量脉宽调制原理,控制IPM模块给电机电枢绕组施加不同方向的空间电压矢量。利用主控制器的12位A/D采样通道获取定子A、B相电流值从而计算出直轴电流id。结合电永磁转子的磁场特性以及定子电感的饱和效应,根据id的变化曲线判断出电机转子的电角度位置。
直轴电流;空间矢量脉宽调制;A/D采样;饱和效应
[1]基于旋转高频信号的注入,利用移相和傅式算法从响应电流中获取电机转子初始位置的信息,算法较为复杂。参考文献[2]利用电机的凸极效应和磁路饱和特性,通过对高频电流峰值发生的时刻进行检测,判断电机转子当前位置,此方法对电流采集的准确性要求较高,鲁棒性差。利用定子电感的饱和效应,输入不同的空间电压矢量获取转子的初始位置是最常见的方法之一,电压矢量判断法的精确度较高,且算法简洁易懂[3]。
本文采用STM32F407为主控制器,充分利用其定时器的互补输出功能以及12位的A/D采样模块,结合永磁同步电机特性分析电机转子所处位置。
1 系统的硬件设计
主控制器采用Cortex-M4内核的STM32F407,控制器内部共有14个定时器,其中TIM1以及TIM8为16位的高级控制定时器。TIM1_CH1、TIM1_CH2、TIM_CH3以及TIM1_CH1N、TIM1_CH2N、TIM_CH3N为TIM1的输出引脚及互补输出引脚。根据空间矢量脉宽调制原理(Space Vector Pulse Width Modulation,SVPWM),可有效降低晶体管的开关次数,配置TIM1的6个通道分别输出不同占空比的PWM波驱动IPM模块,为电机角度学习提供所需的空间电压矢量[4]。电机定子三相绕组中的A、B相电流通过电流传感器后,送至STM32F407的12位A/D采样模块。根据Clark以及Park变换,由采样获取的电流值计算出电机电枢绕组的直轴电流id。结合定子电感的饱和效应,根据id的变化曲线即可判断电机转子当前位置。永磁同步电机转子位置学习的硬件处理框图如图1所示。
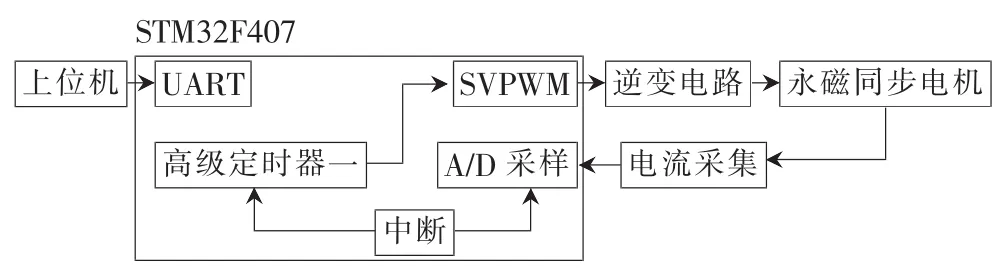
图1 电机转子位置学习硬件处理框图
1.1逆变电路的设计
采用310V直流电压通过逆变电路生成相位相差120°的三相交流电驱动永磁同步电机运行。主控制器STM32F407的TIM1输出互补型PWM波,控制逆变电路的IPM模块PM75RL1A120,其内部主要由7个IGBT晶体管组成,与永磁同步电机组成的逆变电路可等效为图2所示电路。
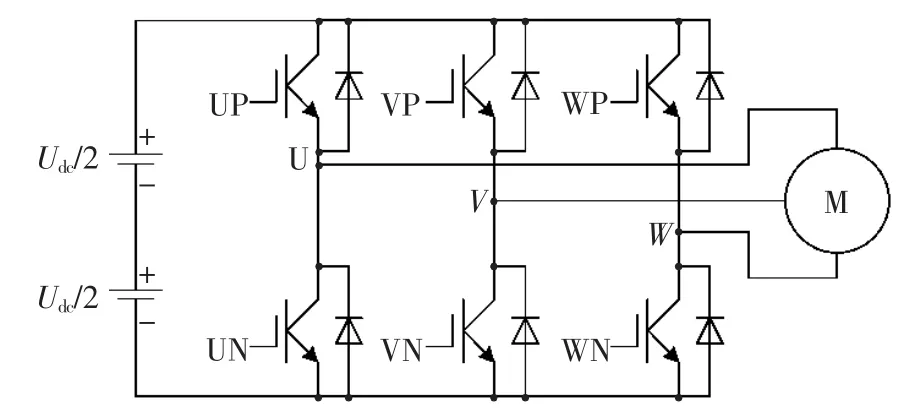
图2 逆变电路
图2中Udc即为直流电压310V,逆变电路共有8种工作状态,分别为:111、110、101、100、011、010、001、000。其中,1表示逆变电路上桥臂导通下桥臂关闭,0则相反,同理可得其他工作状态时晶体管的通断情况。主控制器根据SVPWM原理输出的互补型PWM控制晶体管的工作状态,最终在电机定子三相绕组上产生所需的空间电压矢量。
IPM模块驱动电路选用高速、高共模比的IPM接口专用光耦A4504。A4504的瞬时共模为15kV/μs,内部集成高灵敏度光传感器,极短的寄生延时适合于IPM使用,为IPM专用的电气隔离芯片。A4504与IPM模块连接图如图3所示。
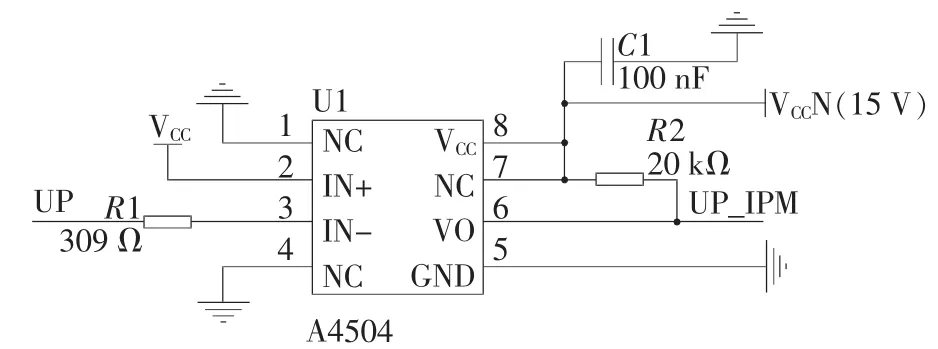
图3 IPM驱动电路
UP信号经过A4504电气隔离生成UP_IPM信号控制IPM上桥臂IGBT晶体管的通断。当UP信号为0时,UP_IPM为0,则上桥臂关闭,反之上桥臂导通,其他桥臂以此类推。虽然A4504的寄生延时很短,但在配置TIM1的互补型输出PWM的死区时间时仍须将其考虑其中,综合A4504以及PM75RL1A120的使用手册,配置死区时间为3μs。
1.2电流采样电路设计
根据定子电感的饱和效应测量永磁同步电机转子位置,在输入电压一定时,电流值是反映电感值大小至关重要的参数,所以电流值的测量直接影响电感值判断的准确性。STM32F407芯片拥有多达16个A/D采样通道,采样精度高达12位,采样速率可以达到2.4MS/s,采样通道分为规则通道和注入通道。实验采用A/D注入转换通道分别采样A、B相电流。
永磁同步电机的工作电流达到安培级,这样的大电流不适合直接测量,同时为降低前后级电路的相互影响,采用电流互感器将原始信号衰减为0.005倍后,再将信号传输到后级测量电路。主控制器STM32F407的A/D采样通道为电压采样,需先将电流信号转换成电压信号,A/D采样的有效范围为0~Vref。由于iA、iB的方向不是唯一的,因此通过图4所示的电压偏置电路将电流值转换成电压值并提升到0~Vref的范围,Vref为AD采样的参考电压。
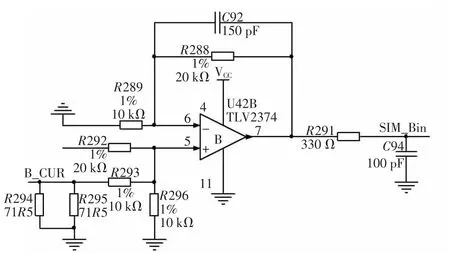
图4 电压偏置放大电路
2 电压空间矢量实施策略
电机气隙内“小凸极”的形成与永磁转子磁极具有对应的关系,因此根据凸极效应可以估计出永磁转子的位置。
图5为永磁同步电机的解耦模型,其中A、B、C为定子三相绕组的轴线,α和β为相互垂直的静止定子两相坐标系,α轴与A轴重合。d轴和q轴为相互垂直的动态两相坐标系,d轴与转子轴线重合。在d-q坐标系下电机模型为[5]:
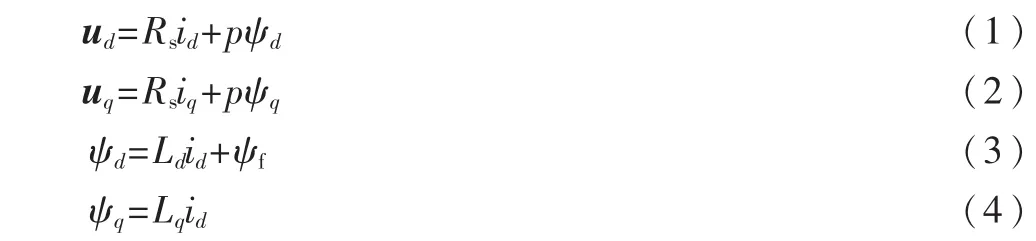
其中,ud、uq分别为d、q轴电压矢量:Rs为定子绕组电阻:id、iq分别为直交轴电流;p为微分算子;ψd、ψq分别为直交轴磁链;Ld、Lq分别为直交轴电感,Ld=Lq;ψf为转子永磁体磁极产生的磁链,为常数。
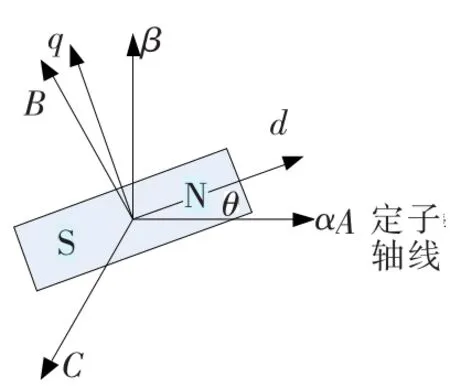
图5 电机解耦模型
当磁路不饱和时,Ld为常数;当磁链增加到一定程度时,磁路饱和,会导致Ld饱和,直轴电感随电流增大而减小[6]。即当施加大小相同、方向不同的空间电压矢量时,若ud足够大,结合图5和式(3)、(4),与转子轴线方向重合的磁路最先出现饱和,此方向的Ld最小,而对应的id则达到最大。
空间电压矢量判断法逐步提高角度判断精度,输入对应的空间电压矢量。首先以30°为判断精度输入12个空间电压矢量。电压矢量施加的顺序为1~12,如图6所示。注意,在每两个电压矢量施加的间隙6个开光管要关闭足够长的时间,以保证绕组电流充分衰减到零。
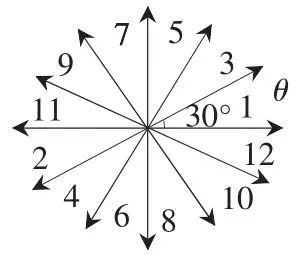
图6 电压矢量添加顺序一
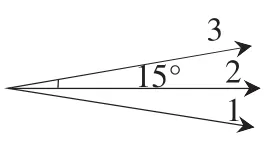
图7 电压矢量添加顺序二
在此基础上逐步提高判断精度。如第一步所学角度为θ,以15°为判断精度施加顺序如图7所示的电压矢量,并以此类推,直至达到所需的角度判断精度[3]。
2.1软件设计流程
永磁同步电机转子位置估计的关键技术之一在于空间电压矢量的生成。以主控制器STM32F407的库函数为基础,配置TIM1的输出PWM波为互补中央对齐输出型。另外,配置TIM1的预分频器,控制输出PWM波的周期为8kHz。根据SVPWM原理,配置TIM1的CCR1、CCR2、CCR3(Capture/Compare Register,CCR)以控制输出PWM波的占空比。
获取永磁同步电机转子位置的另一个关键技术是对反馈电流信息的处理。配置STM32F407主控制芯片的12位A/D采样通道为注入转换通道。采样获取A、B相电流值,根据Clark及Park变换算出id。通常,以id的大小作为位置判断依据,这种处理方式对电流采样的要求比较高。
结合式(1)、(3),可得:

根据惯性环节的阶跃响应特征可知,给定ud信号,此时的电流响应为:

id为一指数曲线,Ld越大,id趋于稳定的时间越早,则可以id的变化率作为电机转子位置的判断标准。实际测量时,在同一个电压矢量的作用阶段,多次采样id,以其后半段值的变化率作为最终id。根据当前的id值以及软件存储的信息更新电机位置值及最大电流值。这样的处理方式可有效提高电子转子位置判断的准确性。电流采集处理以及转子位置更新流程如图8所示。
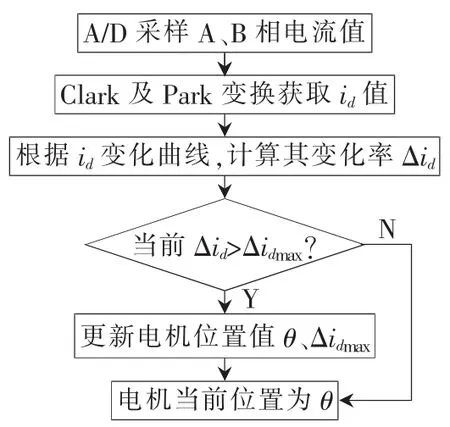
图8 电流采集处理与位置更新流程图
电机转子位置的准确度取决于施加的空间电压矢量的最终精度,空间电压矢量施加步骤可根据图6及图7的步骤进行。对应id变化率最大的空间电压矢量的角度值即为电机转子的位置。永磁同步电机转子位置估计的软件流程如图9所示。
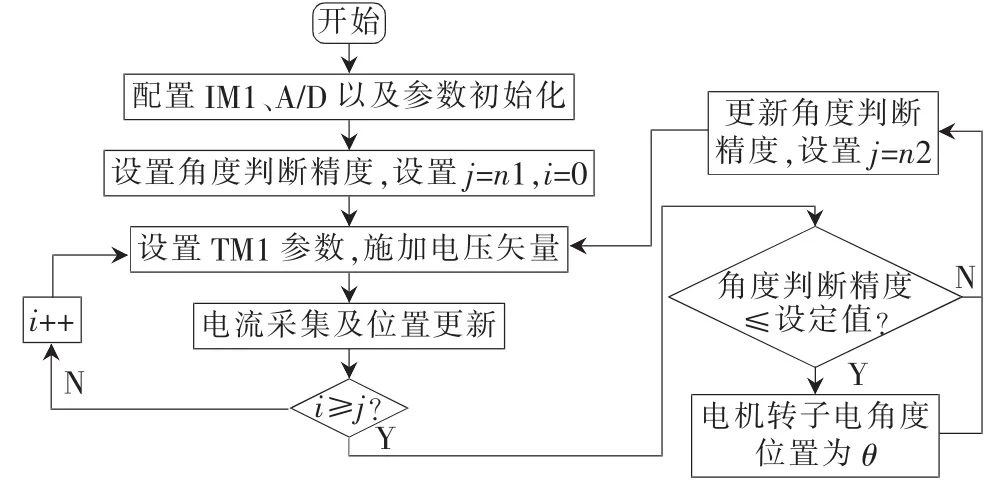
图9 电机转子位置估计流程图
3 实验结果
采用16对级永磁同步电机为实验对象,旋转电机转子使其处于电角度为45°位置。记录步骤1各个电压矢量所对应的id,其变化趋势如图10所示。
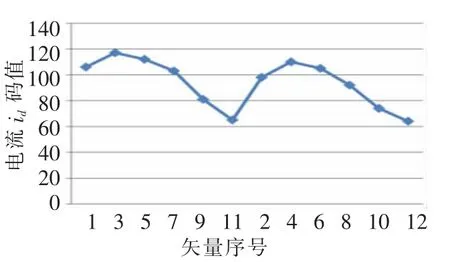
图10 步骤1各矢量对应id值
由图10可知,当电机转子位于电角度为45°的位置时,此时空间电压矢量3和矢量5所对应的电流值id最大,根据电压矢量判断法在第一步可以准确地判断出电机转子的大概位置在30°~60°之间。为提高角度判断的精确度,可不断提高角度学习精度。本次试验最终达到的角度判断精度达到3.5°。实验将电机转子旋转至不同的位置,利用空间电压矢量判断转子位置结果如表1所示。
由表1可以看出,当电机转子处于不同的位置时,利用空间电压矢量判断法得到的转子电角度位置的误差均在10°以内,这样的学习误差对于工程应用是一个合理的范围。由此可见,空间电压矢量判断法可以有效地判断出电机转子当前所处位置。
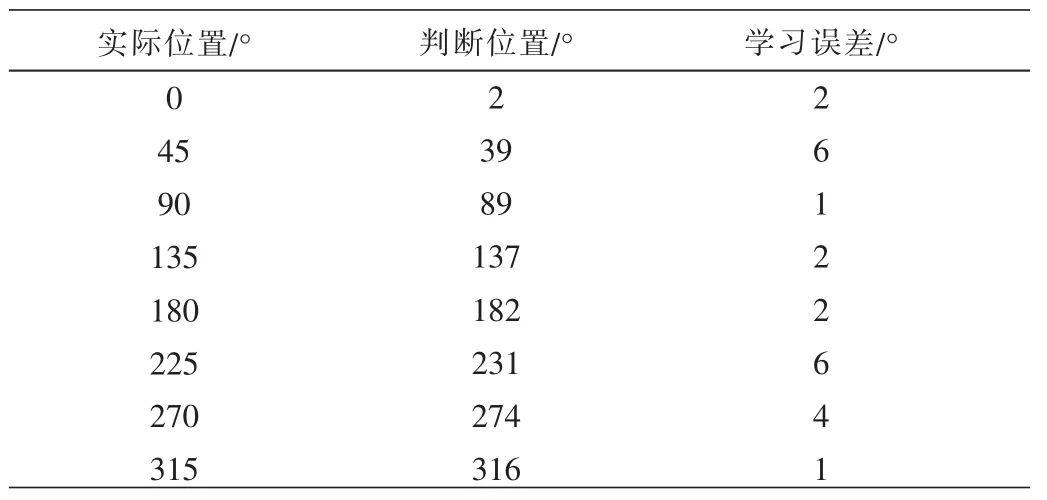
表1 转子位置判断结果
4 结论
结合外围硬件电路,STM32F407配置的TIM1可以方便、有效地完成空间电压矢量的输出,12位A/D采样可以准确地将电流信号反馈给主控制器,适用于电机控制领域。实验结果表明,利用空间电压适量判断法,根据直轴电流id的变化曲线,利用定子电感的饱和效应判断永磁同步电机转子的位置,算法简洁,精度较高。
参考文献
[1]何栋炜,彭侠夫,蒋学程,等.内置式永磁同步电机转子初始位置估计方法[J].电机与控制学报,2013,17(3):49-55.
[2]李敏,游林儒.基于高频电流注入的永磁同步电机转子位置初始化方法[J].微电机,2010,43(9):66-69,108.
[3]韦鲲,金辛海.表面式永磁同步电机初始转子位置估计技术[J].中国电机工程学报,2006,26(22):104-109.
[4]李培伟.永磁同步电机伺服系统矢量控制技术研究[D].南京:南京理工大学,2013.
[5]陈荣.永磁同步电机伺服系统研究[D].南京:南京航空航天大学,2004.
[6]谢宝昌,任永德.电机的DSP控制技术及其应用[M].北京:北京航空航天大学出版社,2005.
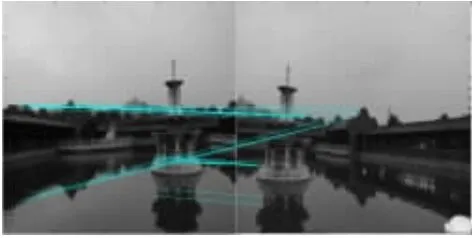
图6 SIFT算法
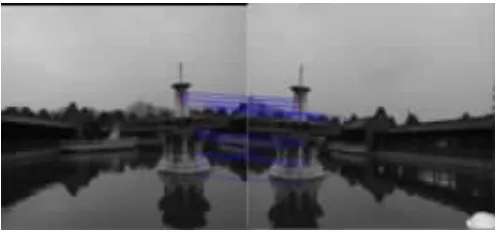
图7 本文算法

表2 匹配实验结果对比
4 结论
本文结合了Harris角点检测算子和SIFT算法的优点,提出了一种适用于复杂场景下景物图像的Harris-SIFT匹配算法,在一定程度上解决了两个问题:(1)新的Harris特征计算方法,检测到的特征点分布更均匀,缩短了运算时间;(2)通过对SIFT特征向量进行相似度检测,降低了算法冗余度,提高了运算速度和匹配。实验证明了本文算法在复杂场景下对景物匹配的有效性。
参考文献
[1]赵启兵,王养柱,胡永浩.基于改进SIFT算法的无人机遥感影像匹配[J].电光与控制,2012(3):36-39.
[2]陈付平,刘纯平,夏德深.对多尺度边缘检测中边缘位移的研究[J].中国图形图象学报,2003,8(11):1247-1253.
[3]HARRIS C,STEPHENS M.A combined corner and edge detector[C].Proceedings of the 4th Alley Vision Conference,Manchester:Organizing Committee AVC,1988:147-151.
[4]PHILIPPE T,MICHAEL U.Optimization of mutual information for multiresolution image registration[J].IEEE Transactions on Image Processing,2000,9(12):2083-2098.
[5]LOWE D G.Distinctive image featuresfrom scale—invariant keypoints[J].International Journal of Computer Vision,2004,60(2):91-110.
[6]陈浩.基于拉普拉斯金字塔变换的图像融合算法研究[J].激光与红外,2009,39(4):439-442.
[7]李欢欢.基于HARRIS与SIFT算法的自动图像拼接[J].计算机工程与科学,2012,34(11):102-106.
[8]吕冀,高洪民.图像制导中的快速算法研究[J].系统工程与电子技术,2009,31(5):1148-1152.
[9]刘松涛,杨绍清.图像配准技术研究进展[J].电光与控制,2007,14(6):99-105.
(收稿日期:2014-12-28)
作者简介:
梁栋(1991-),男,硕士研究生,主要研究方向:视频分析与图像处理。
Measurement for the position of permanent magnet synchronous motor based on STM32F407
Zhu Dandan1,Chen Xiaoping1,Tan Yong2
(1.College of Electronic Information,Soochow University,Suzhou 215012,China;2.NanRui Group Co.,Ltd.,Nanjing 210000,China)
Taking the STM32F407 as the kernel based on Cortex-M4,to make winding resistance exert different direction of space voltage vector through controlling the IPM module according to SVPWM principle.It calculates the current of direction axis based on the current of A phase and B phase from the A/D channel of core controller.It Judges the position of rotor by the curve according to the magnetic field′s characteristic of permanent magnet synchronous motor rotor and saturation effect of inductance.
current of direction axis;SVPWM;A/D sampling;saturation effect
TM34
A
1674-7720(2015)10-0051-04
0引言
2015-01-30)
朱丹丹(1990-),通信作者,女,硕士研究生,主要研究方向:嵌入式系统,基于永磁同步电机的一体机研究。E-mail:zdd123456yl@163.com。
陈小平(1965-),男,工学博士,教授,博士生导师,主要研究方向:嵌入式系统,进化计算等。
檀永(1983-),男,硕士研究生,主要研究方向:基于永磁同步电机的一体机研究。
江苏省产学研前瞻性联合研究项目(BY2012110)
永磁同步电机初始位置的估计关系到电机是否能成功启动,以及能否以最大转矩启动的问题,历来是工程技术界研究的难点与重点问题之一。
