基于MatlabSimulink设计的直接转矩控制系统仿真
2015-10-19师素娟马少丹
师素娟 满 达 马少丹
(华北水利水电大学,河南 郑州 450011)
基于MatlabSimulink设计的直接转矩控制系统仿真
师素娟 满 达 马少丹
(华北水利水电大学,河南 郑州 450011)
本文设计了一种基于MatlabSimulink软件仿真的直接转矩控制系统,通过其数学仿真功能设计出直接转矩控制系统的转矩调节、转速调节等模块,组成三相异步电动机的直接转矩控制系统。仿真结果证明了该方法能够准确的控制三相异步电动机的速度和转矩稳定输出。
异步电动机;数学仿真;直接转矩
三直接转矩控制系统通过检测定子电压和电流,在定子坐标系下观测电机的磁链、转矩,并将观测值与给定的磁链、转矩相比较,综合考虑磁链和转矩信号选择电压空间矢量,直接对电机定子磁链及转矩进行控制。本文通过Matlab Simulink的建模仿真功能,建立了一种三相异步电动机直接转矩控制系统仿真模型。
1 直接转矩控制系统仿真
1.1直接转矩控制系统工作原理
直接转矩控制摒弃了矢量控制中解耦的控制思想,采用定子磁链定向和瞬时空间矢量理论,通过检测定子电压和电流,在定子坐标系下观测电机的磁链、转矩,并将观测值与给定的磁链、转矩相比较,差值经滞环控制器调节得到相应的控制信号,综合考虑磁链和转矩信号选择电压空间矢量,直接对电机定子磁链及转矩进行控制,在实现磁链控制的同时,也实现了转矩的直接控制,从而使得直接转矩控制的交流感应电机变频调速系统具有优越的动静态性能。
1.2三相异步电动机和逆变器
三相异步电动机和逆变器使用的是Matlab Simulink软件中自带模型库中的模型。如图1所示:
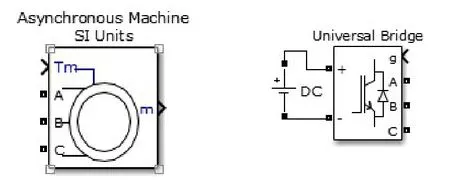
图1 三相异步电动机和逆变器
逆变器在三相异步电机的直接转矩控制系统中是一个重要原件。本文采用的是三相两点式电压型逆变器,该逆变器有三个桥臂,六个开关组成,由于同一个桥壁上的两个开关不能同时接通和断开,故共有八种开关组合。该模型八个工作电压在αβ正交定子坐标系中可以输出八个基本输出矢量,其中有两个零矢量,相当于三相异步电动机绕组短接。另外六个非零矢量组成了电压空间矢量。幅值为2Udc/3(Udc为直流电压),如图2所示(0、1代表逆变器A、B、C的开关状态)。

图2 三相电压型逆变器的电压空间矢量
1.3磁链滞环调节和转矩滞环调节
磁链滞环调节的目的就是根据估算出的磁链判断磁链的运动轨迹位置,并且能够正确的反映变化的磁链开关信号来选择相应的电压空间矢量。根据定子电压和定子磁链之间的关系可以用公式(1)来表示:

也可以写成微分形式:

由于定子电阻R_s对定子电压核磁怜的影响小可忽略不计则:

由公式(2)可以看出三相异步电动机的定子磁链的运动方向是沿着定子电压的方向运动的,这样便在正交定子坐标系中形成了六个磁链扇区。
磁链滞环调节的调节过程是通过滞环比较器实现的。在允许的偏差范围内输出磁链信号,当磁链信号的磁链值达到了调节器的下限,此时应该增加磁链的电压空间矢量,反之当磁链值达到了调节器的上限则减小磁链的电压空间矢量;像这样反反复复的对磁链进行调节,可以维持近似圆形的磁链轨迹。
转矩滞环调节的作用就是对电机的转矩实现直接控制。如公式(4)所示:

转矩滞环调节也是通过滞环比较器来实现对转矩的直接控制。输入信号为转矩的给定值和实际值之间的偏差。当偏差值大于允许范围内最大偏差值时输出信号应选择能增大电磁转矩的电压空间矢量;当偏差值在允许范围之内时,转矩保持不变;当小于最小偏差值时,应减小电压空间矢量,降低转矩。
1.4电压矢量开关信号选择
根据对磁链滞环调节和转矩滞环调节控制原理的分析可知,直接转矩控制的关键是在于根据磁链和转矩的要求合理的选择电压空间矢量,就是将两个调节器和磁链所在扇区结合起来共同控制逆变器的开关状态,既要保证三相异步电动机的定子磁链在给定的范围内变化,又要保证三相异步电动机的输出转矩快速的跟随给定变化,是直接转矩系统获得良好的动态性能。
电压空间矢量开关信号选择是直接转矩控制系统的精髓。为了实现对定子磁链的闭环控制,需要判断定子磁链的空间位置,根据定子磁链在静止两相α-β坐标系下的空间角度θ得出定子磁链所在扇区(如图2所示)以及电压矢量空间开关表最终得到电压空间矢量开关信号。仿真模型如图3所示。

图3 电压矢量开关信号选择仿真模型
1.5定子磁链u-i模型观测器
定子磁链u-i模型就是通过定子电压和定子电流来确定定子磁链,根据公式(1)来确定三相异步电动机的定子磁链优点是计算方法简单,只需要知道三相异步电动机的定子电阻参数,并且式中的定子电压us和定子电流is可以通过电压电流传感器测量出来,方便观测磁链。仿真模型如图4、5所示。

图4 定子磁链u-i观测模型

图5 定子磁链u-i观测模型
2 直接转矩控制系统仿真结果分析
针对上述设计的Matlab Simulink仿真模型进行空载和负载两种情况的实验。三相异步电动机相关参数如下:额定功率15kw,额定电压400v,频率50Hz,最高转速1460r/min。定子磁链给定幅值0.8。
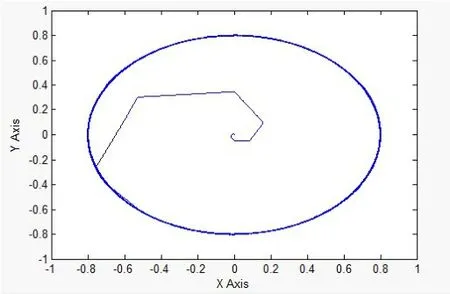
图6 定子磁链运动轨迹
如图6所示,当系统开始运行时,定子磁链的幅值从0开始迅速增长,很快达到磁链的给定幅值0.8左右,然后通过直接转矩控制理论对三相异步电动机的定子施加不同的电压矢量,磁链幅值被限制在较小的容差范围内,从而利用此模型建立了一个运动轨迹近似为圆形的定子磁链。当外部负载发生变化时,对定子磁链的运动轨迹影响仍然很小。
①电机空载运行试验
转速1200r/min,负载为0N*m。
如图7、8所示,三相异步电动机的启动时间为0.5s,启动转速峰值为1420 r/min。电机在启动过程中,电机转速不断上升到峰值并保持。经过0.5s后,启动完成,电机转速缓慢下降至1200 r/min并保持。波形显示稳定。转速波形达到稳定值为1200.95r/min。响应时间为0.1652s。
稳态误差:(1200.95-1200)/1200×100%=0.08%
超调量:(1420-1200.95)/1200.95×100%=18.2%

图7 空载时定子电流
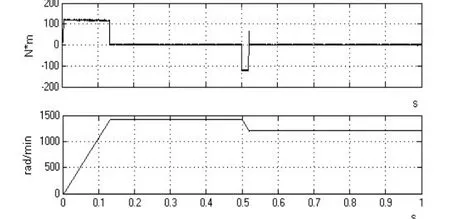
图8 空载运行转矩与转速对比图
②电机负载运行试验
转速1200r/min,负载为100N*m

图9 负载时定子电流图

图10 负载运行转矩与转速对比图
如图9、10所示,同样启动时间为0.5s,启动峰值为1420 r/min。启动完成后,在0.7s时让电机负载运行。从图中可以看到在0.7s时定子电流发生了变化,转矩也从0N*m上升到了100N*m。

图11 负载运行转速、转矩局部放大
图11是图10的局部放大,在0.7s时給电机加载,这时发生了一个细微的变化:负载转矩上升,转速降低,随后又回到了恒转速的状态并一直处于负载运行的状态。
通过对空载、负载两种情况的分析可以看出,在低速状态下的电磁转矩脉动小,稳态时,定子电流含有的谐波比重小。在运行过程中具有响应快、灵敏度高、稳定性强等优点。
3 结语
通过MatlabSimulink建立的直接转矩控制系统仿真模型在研究三相异步电动机速度控制稳定性方面操作起来十分方便。
[1]林辉,王辉.电力电子技术[M].武汉:武汉工业出版社,2002.
Simulation of Direct TorqueControl SystemDesigned by Matlabsimulink
Shi Sujuan Man Da Ma Shaodan
(North China University of Water Resources and Electric Power,Zhengzhou Henan 450045)
This paper designed a direct torque control system simulated by Matlabsimulink software,through its mathematical simulation capabilities designed the torque control,speed regulation and other modules of direct torque control system,to consist of a direct torque control system of three-phase asynchronous motor.Simulation results show that the method can accurately control the speed of three-phase asynchronous motor and the stable output of torque.
asynchronous motor;mathematical simulation;direct torque
TP273+.2
A
1003-5168(2015)12-0030-3
2015-12-15
师素娟(1960-),女,副教授,研究方向:机械CAD及仿真技术、工程车辆现代设计技术方面的研究;满达(1991-),男,硕士生,研究方向:自动控制、仪器仪表等方面的研究;马少丹(1989-),女,硕士生,研究方向:机电一体化方面的研究。
