基于无人机遥感的高分辨率影像快速获取研究
2015-10-15黄日娟梅树红陆向明
黄日娟+梅树红+陆向明

摘要:CORS和无人机低空遥感技术相结合,利用CORS系统测量摄区像控点,对无人机航测影像进行几何校正,生成高精度、高分辨率正射影像图。该方法经验证是一种便捷的高分辨率影像获取的技术方法,极大地扩大了无人机的应用领域。
关键词:CORS无人机遥感技术
中图分类号:P231 文献标识码:A 文章编号:1672-3791(2015)07(b)-0000-00
在高速发展的信息时代,如何快速获取地理空间数据已经成为研究的热点。相对于传统的测量方法,以人造卫星、大飞机等为平台的航天航空摄影测量已经广泛应用,但是受气候、天气、机场等因素影响巨大,尤其是在广西,全年的有效作业时间少,即使是利用卫星进行摄影测量,周期也比较长,无法满足影像应急需求。而运用无人机作为平台的低空遥感方法机动灵活,受外界因素的制约较小,能快速获取空间遥感信息,完成遥感数据处理、建模和应用分析。同时无人机遥感具有成本低、机动灵活、高时效、高分辨率等优点,是传统卫星遥感和航摄的重要补充。而将CORS系统和无人机低空遥感技术进行结合,为提高无人机遥感精度和后期数据处理中提供了更好的保障。
1试验区概况
此次实验区位于南宁市郊区北面,面积约80亩,准备进行规划建设。片区是已经进行过土地平整的耕地片区,地形起伏不大,有一条近5米的河流沿地块西面、北面和东面流过,地块四周周边回填造路,路面宽约3米,道路同时又是防洪堤坝,以防河流涨水时对片区内经济作物造成影响。测区内有菜地、果园、鱼塘和管理用房等。为协助业主合理规划试验区的土地,合理调整土地利用结构、提高土地集约利用效率,决定利用最高效的方式对试验区开展航拍,获取试验区高分辨率影像。
2 CORS和无人机遥感技术特点
2.1 CORS系统
CORS系统,即利用多基站网络RTK技术建立的连续运行卫星定位服务综合系统(Continuous Operational Reference System,缩写为CORS)。具体指利用地面布设的一个或多个基准站组成GPS连续运行参考站,综合利用各个基站的观测信息,通过建立精确的误差修正模型,通过实时发送RTCM差分改正数,修正用户的观测值精度,在更大范围内实现移动用户的高精度导航定位服务。广西连续运行参考站系统(以下简称:GXCORS)是利用现代卫星定位、计算机网络、数字通讯等技术进行多方位、高深度集成的先进测量系统。它可以全自动、全天候、实时提供网络覆盖区域的高精度三维坐标和时间信息,是广西全区实现自治区现代化管理、城市现代化管理、数字广西建设、数字城市建设等不可缺少的重要组成部分。GXCORS的建成是以GPS 全球卫星定位系统观测技术为主,并能兼容GLONASS系统,满足广西全区基础测绘、国土规划、土地管理、工程建设、形变监测、交通监控、港口管理、公共安全等方面对定位导航服务的需要。试验区坐落在GXCORS服务区域内,此次是利用GXCORS定位服务功能进行试验区内像控制点坐标数据采集。
2.2无人机低空遥感技术
无人机低空遥感技术,则是利用先进的无人驾驶飞行器技术、遥感传感器技术、遥测遥控技术、通讯技术、GPS差分定位技术和遥感应用技术,具有自动化、智能化、专用化等作业特点,快速获取空间遥感信息,完成遥感数据处理、建模和应用分析的应用技术。
此次实验采用的无人机设备是大疆精灵2代,其通过陀螺仪、加速计、GPS 位置、方向传感器、高度传感器等进行姿态检测和控制,有效稳定了飞行姿态。利用3轴云台搭载小相机,可控制俯仰和滚转的相机云台带陀螺自稳功能,能够进行低空影像拍摄。
3 CORS和无人机结合作业流程
将CORS系统和无人机遥感技术进行结合,作为一种便捷的获取高分辨率影像的技术方法,具体操作方法流程有以下方面。
3.1 实验区域的原始影像获取
选择实验区域内适合起飞的较平坦的地方作为无人机起飞降落的大本营,基于谷歌地图对试验区域进行区域分析,并结合区域内地形及航飞范围进行航线规划。由于此次试验区地处郊区农村,范围较小,在谷歌地图上没有缩略图可以利用,因此根据测区情况,首先进行了两次试飞,两次的航线在系统中形成后才对整个试验区进行进一步的航线规划,此次试验规划航线数10条,每条航线30张影像。由于试验区范围形状不规则,而且周边有河流,为了保证无人机安全,对试验区采用了不规则航线规划设计,保证试验区内100%航摄覆盖。测区是农作区,不涉及到人员的安全问题。
3.2 摄区内像控点坐标采集及处理
根据试验区大小和地形特点,同时根据像控点分布的要求,该项目利用GXCORS系统进行试验区像控点采集。仪器采用海星达IRTK2S三星双频GPS流动站一套。首先,建立项目和坐标系统管理,坐标系统采用国家2000大地坐标系,投影为中央子午线108度三度带高斯投影,高程采用1956黄海高程系统。用蓝牙技术连接手簿和接收机,通过GPRS接入GXCORS。RTK采样间隔为1秒,每个点观测历元不少于10个。在像控点测量前,对测区附近的高等级控制点进行检测,平面和高程较差均满足要求。
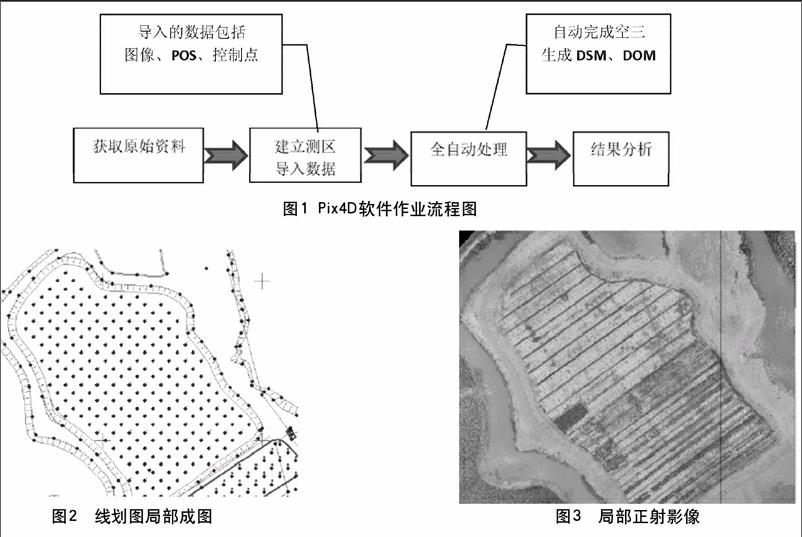
像控点选择实验区内明显的屋顶角点、道路交叉口和田埂交叉点,实测这些特征点的精确坐标及高程,选择其中20个作为影像纠正控制点,50个作为检查点。整个项目的航飞及像控采集所用时间约为1.5小时,采集时间段为上午8点半至10点。测图线划图效果如图2所示。
3.3 影像处理
数据处理软件是Pix4D,Pix4D是集全自动、快速、专业精度为一体的无人机数据和航空影像处理软件。无需人工干预,即可将数千张影像快速制作成专业的精确的二维地图和三维模型。Pix4D数据处理流程如图1所示。
图1Pix4D软件作业流程图
影像处理分两步进行,首先是影像粗校正,主要是利用数据处理软件对原始影像进行初步拼接和正射处理,得到粗校正影像,同时可以检查航拍相片是否齐全可用;其次,利用采集的像控点坐标对影像进行进一步纠正,对精纠正影像进行重采样得到具有正确坐标的高精度影像。
最终输出的成果有数字表面模型及正射影像,栅格数字表面模型(DSM)最终保存为GEOTIFF文件,可选择生成合并瓦片形式,即生成一个融合的大文件,也可以生成分块的瓦片形式。正射影像图可以生成GeoTiff格式。正射影像成果如图3所示。
图2 线划图局部成图 图3局部正射影像
软件最终还提供生成谷歌地图瓦片和KML文件,瓦片和LML文件可以在GoogleMaps中显示生成的影像。
软件最终还生成三维模型成果,用正射影像、DSM生成OBJ格式文件。(在三维建模时使用,可以在3DMAX中打开)三维效果如图4所示。
图4 三维地表模型
4 结语
无人机的航摄规模、精度以及其作业模式非常适合较小区域,其成果与传统的航摄成果相比较,具有分辨率高、作业效率高、周期短、轻便灵活、突破云雾天气影响等优势,采用先进的处理软件对采集的数据进行处理,成果更加丰富、直观。结合GXCORS进行作业,充分利用CORS具有连续运行、坐标统一、高精度、覆盖广和不受天气影响等特点,CORS辅助采集地面控制点有效弥补无人机硬件设备的缺陷引起的位置精度不足,为后期数据精纠正处理提供精准的像控点坐标。实验区的数据采集到最终成果生成仅用了一天半时间,相对以往的航空摄影测量效率有很大的提高。
参考文献
[1] 连蓉.四旋翼无人机影像获取及DOM 生产研究[J].地理空间信息,2014(1):80-83,10.
[2] 鲁恒,李永树,何敬,等.无人机低空遥感影像数据的获取与处理[J].测绘工程,2011(1):51-54.
[3] 尹杰,杨魁.基于无人机低空遥感系统的快速处理技术研究[J]测绘通报,2011(12).
[4] 任向红.微型无人机航空摄影测量技术在宁夏土地整治中的应用——以宁夏中北部土地开发整理重大工程项目为例[J].测绘与空间地理信息,2013(9).
