双向测距与时间同步系统中设备时延标定的研究
2015-10-15马红皎李梦吴华兵胡永辉
马红皎,李梦,吴华兵,胡永辉
(1.中国科学院国家授时中心,西安 710600;2.中国科学院时间频率基准重点实验室,西安 710600;3.中国科学院精密导航定位与定时重点实验室,西安 710600;4.中国科学院大学,北京100049)
双向测距与时间同步系统中设备时延标定的研究
马红皎1,2,3,李梦1,4,吴华兵1,2,3,胡永辉1,2,3
(1.中国科学院国家授时中心,西安 710600;2.中国科学院时间频率基准重点实验室,西安 710600;3.中国科学院精密导航定位与定时重点实验室,西安 710600;4.中国科学院大学,北京100049)
双向测距与时间同步系统采用的是双向单程伪距测量机制。因此设备时延包含在伪码测距的测距值与钟差值之中,这对系统的测距精度产生了不良的影响。针对这种设备时延,提出了双向测距与时间同步终端闭环校准方法。实验及分析表明该方法是有效的,并为系统的下一步设计提供了有效的参考。
双向测距;时间同步;设备时延
0 引言
基于双向单程伪距测量模式的双向测距与时间同步(简称DRTS)系统通过安装在系统中两测距终端的信号发射机和接收机,利用伪码和载波相位测量,获得各自的相对伪距[1-4]。由于该测距方法中,测距信号的发射路径与接收路径基本相同,且方向相反,因此该测距模式可以最大限度地消除测距过程中传播路径误差的影响,从而实现两测距终端之间的精密测距与时间同步[2]。然而设备时延误差是影响系统测量精度的主要原因,其精确校准是实现精密测距与时间同步的关键。
1 双向测距的原理以及数学模型
所谓双向单程伪距测量,即通过安装在两测距终端的信号发射机和接收机,利用伪码和载波相位测量获得各自的相对伪距[2]。该测距方法中,由于两测距终端使用各自的时钟源,因此双向测量并非同时进行,而是两个单向测量按照一定的时序的组合。双向单程伪距测量(DOWR)的单次测量时序原理如图1所示。
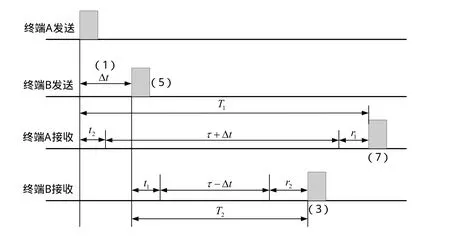
图1 DOWR的时序原理
由图1可得到如下关系式:

式(1)和(2)中,Δt是两测距终端之间的钟差,T1,T2分别是终端A和终端B测量获得的本地伪距,t1,r1分别是测距信号在终端A的发射设备和接收设备中传输的时延,t2,r2分别是测距信号在终端B的发射设备和接收设备中传输的时延,τ是信号在两测距终端之间的传播时延。对式(1)和式(2)分别进行相减和相加运算,得到终端A和终端B之间的钟差Δt和距离ρ分别为[2]

式(3)和(4)中,T1和T2作为测量值,可从终端的码跟踪环中获取并嵌入到传输帧数据区内,通过数据交换链路向对方发送[2]。分析可知,设备时延之差和设备时延之和分别包含在钟差测量值与伪距测量值之中,这将对双向测距与时间同步系统的测量精度产生很大的影响[5]。因此,如果想要提高DRTS法的测量精度,就需要对双向测距与时间同步系统的收发设备时延进行测量和校准。
2 设备时延定义
所谓的设备时延,除了包含信号在介质中传输的物理时延以外,还应包括在特定收发信机硬件、信号处理算法以及其他外部输入条件下的等效设备时延[6]。发射设备与接收设备的时延的组成如图2所示。

图2 发射设备与接收设备的时延组成
接收设备时延的组成如图2(a)所示。图2(a)中,τr0代表信号接收及预处理时延,τr1表示本地参考时间与秒脉冲输出时间基准点之间的差值,τr2代表本地参考时间与输入秒脉冲基准点之间的差值,τr3代表参考伪码相对于本地参考之间的时延,τr4为伪码的测距值[1,7]。因此信号接收时刻与本地时间参考时刻之间的时延,可以用τr0-τr3+τr4表示。当接收设备同步于外部输入时间标准信号时,接收设备时延可归算到输入秒脉冲基准点,表示为τr0-τr3+τr4-τr2;当接收设备不具备外部输入时间标准信号,而具备输出秒脉冲信号时,可将设备时延归算到输出秒脉冲基准点,即由τr0-τr3+τr4-τr1表示。
发射设备时延的组成如图2(b)所示。图2(b)中,τt0为信号发射时间基准点与本地参考信号之间的时延,τt1为输出秒脉冲基准点与本地时间参考之间的时延,τt2为输入秒脉冲基准点与本地参考时间之间的时延[1,7]。当发射设备同步于外部输入的时间标准信号时,可以将发射设备时延归算到输入秒脉冲基准点,即可用τt0-τt2表示;但如果在发射设备不具备外部输入的时间标准信号,而具备输出秒脉冲信号时,可以将发射设备时延归算到输出秒脉冲基准点,即可用τt0-τt1表示。
3 设备时延的测量方法
3.1 设备时延测量方法
如今应用最为广泛的设备时延测量方法为时延传递法,即通过专用时延测试设备与被测设备相连接进行组合时延的测量,通过计算得到各设备时延[8]。假设专用时延测试设备的发射设备时延是T0,那么如果自环链路组合时延是C0,则专用时延测试设备的接收设备时延就可以记为R0=C0-T0。假如被测设备的发射设备和接收设备的时延分别是T1和R1,通过同样方式得到的组合时延可分别记为T0+R1和T1+R0,从而可得到被测设备的设备时延[2-5]。下面以图3所示情况为例分析设备时延的组成及其测量方法。
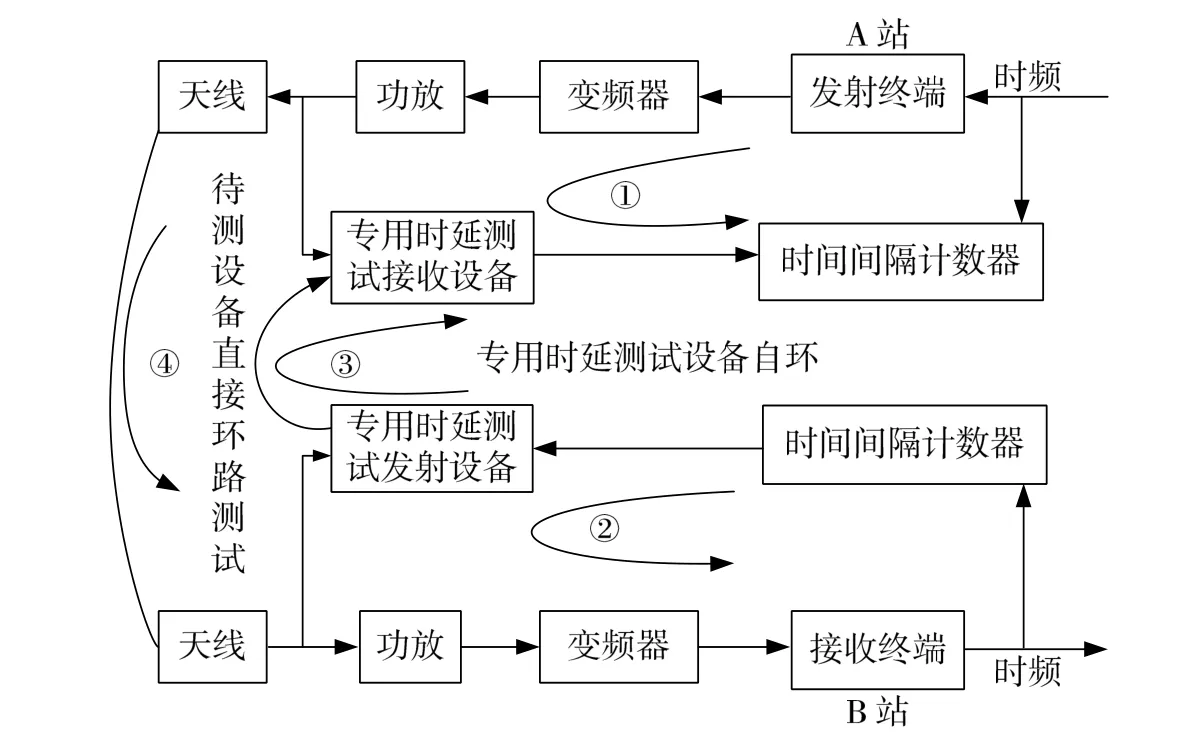
图3 设备时延的组成及测量方法示意图
在图3中,环路1和环路2分别是专用时延测试设备与地面站A和与地面站B的组合时延测量环路,分别可以得到由地面站发射并由专用时延测试设备接收的组合时延,以及专用时延测试设备的发射设备时延与地面站B的接收设备的组合时延,如下所示:

式(5)和(6)中,τAT为地面站A的发射设备时延,τBR为地面站B接收设备时延,τDT和τDR分别为专用时延测试设备的发射设备时延和接收设备时延,τA→D为信号由地面站A发射并由专用时延测试设备所接收时的伪距测量值;τD→B信号由专用时延测试设备发射并由地面站B接收时的伪距测量值,Δtcounter1和Δtcounter2分别是通过计数器测量得到的两个设备时间基准之间的钟差,τcable1和τcable2分别为信号在连接电缆中传输的时延,τAT-antenna和τBR-antenna分别是地面站A的发射天线时延和地面站B的接收天线时延。地面站的天线时延可以认为是已知的。因此由地面站A发射并且由地面站B接收的设备组合时延就可以表示为

式(7)中,(τDT+τDR)为专用时延测试设备自发自收的设备组合时延,可由图中的专用时延测试设备的自环测量获得,这样就可以得到(τAT+τBR)。
3.2 DRTS终端闭环自校方法
传统的变频系统群时延测量所采用的矢量网络分析仪法或载波比相法均不适用于DRTS系统。因此,基于上述设备时延测量思路,提出适合双向测距与时间同步系统的设备时延标校方法—DRTS终端闭环自校方法,其总体框图如图4所示。
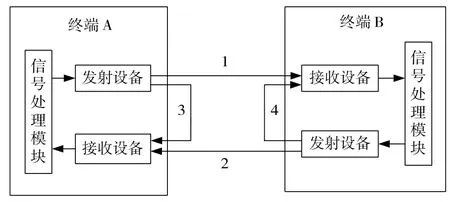
图4 DRTS终端闭环自校方法总体框图
图4中包含4个数据通信链路。链路1是信号从终端A发出由终端B接收的链路,链路2是信号从终端B发出由终端A接收的链路,链路3和链路4分别是终端A和终端B自发自收信号的链路。DRTS终端闭环自校方法的实现由以下两部分独立测量组成:
1)测量图4中链路3和4对应的设备组合时延,即发射设备与接收设备时延之和,其测量框图如图5所示。此时终端A与终端B之间的通信链路断开,分别对终端A和终端B的发射设备与接收设备的组合时延进行测量。可以得到如下表达式:

式(8)和(9)中,TAA和TBB分别为终端A和终端B进行终端闭环测量的时延测量值,tA和rA分别为终端A的发射设备时延与接收设备的时延,τAA为信号由终端A自发自收路径上的时延,tB和rB分别为终端B的发射设备时延与接收设备的时延,τBB为信号由终端B自发自收路径上的时延。此时,因发射设备和接收设备使用同一时间标准,所以无钟差。

图5 终端A和终端B的闭环测量框图
2)测量图4中链路1和链路2对应的设备组合时延,这个测量过程实际上就是系统的双向测距过程。这时关闭终端A和终端B自发自收通信链路,进行两测距终端的信号对发测量,其测量框图如图6所示。由双向单程伪距测量过程可以得到以下表达式:

式(10)和(11)中,TAB为信号由终端A发射,经传输到达终端B的时延测量值,τAB为信号由终端A到终端B的传输路径导致的时延,TBA为信号由终端B发射,经传输到达终端A的时延测量值,τBA为信号由终端B到终端A的传输路径时延,Δt为终端A与终端B之间的钟差值,其余各项意义如上。在双向测距时,终端A与终端B使用各自的时钟,时钟并不完全同步,因此这里存在两终端之间的钟差项。

图6 终端A与终端B的对发测量框图
4 DRTS系统中设备时延导致的伪距和钟差的测量值误差的改正及其有效性
4.1 对伪距的改正
由前面介绍内容可知,DRTS系统中设备时延对伪距测量值的影响可以表示为

由式(12)可知,两终端设备时延之和包含在伪距测量值之中,并且此式还可以表示为:

由式(13)可知,只要得到式(13)中的终端A与终端B的发射设备和接收设备的时延值,就可实现对双向测距与时间同步系统的伪距测量值的改正。这里采取终端设备闭环时延测量方法[9],该方法的流程为:首先断开系统的双向测距功能,并用小于5 cm的传输电缆,分别连接终端A的发射端与接收端、终端B的发射端与接收端,分别形成终端A的闭环测量环路和终端B的闭环测量环路。由于传输电缆很短,此时路径时延可以忽略不计,于是可分别得到:

利用式(12)至(15),可完成DRTS中设备时延导致的伪距测量值误差的改正。
4.2 对钟差的改正
对DRTS系统中设备时延导致的钟差的误差的改正相对比较复杂。如前所述,DRTS系统中设备时延对钟差的影响可以表示为

由式(16)知,系统的两终端设备时延之差包含在钟差的测量值之中[6]。为便于分析,我们对4个测量路径均采用同样的传输电缆进行连接,然后分别进行测量,进行运算得:

再对式(17)至(20)进行计算便可以得出终端设备时延之间的差值,从而可以实现对DRTS系统中设备时延导致的钟差测量值的误差进行改正。
根据上述内容,可将DRTS系统中设备时延导致的测距值和钟差值的误差的改正过程,直观地表示为图7所示的计算流程图。
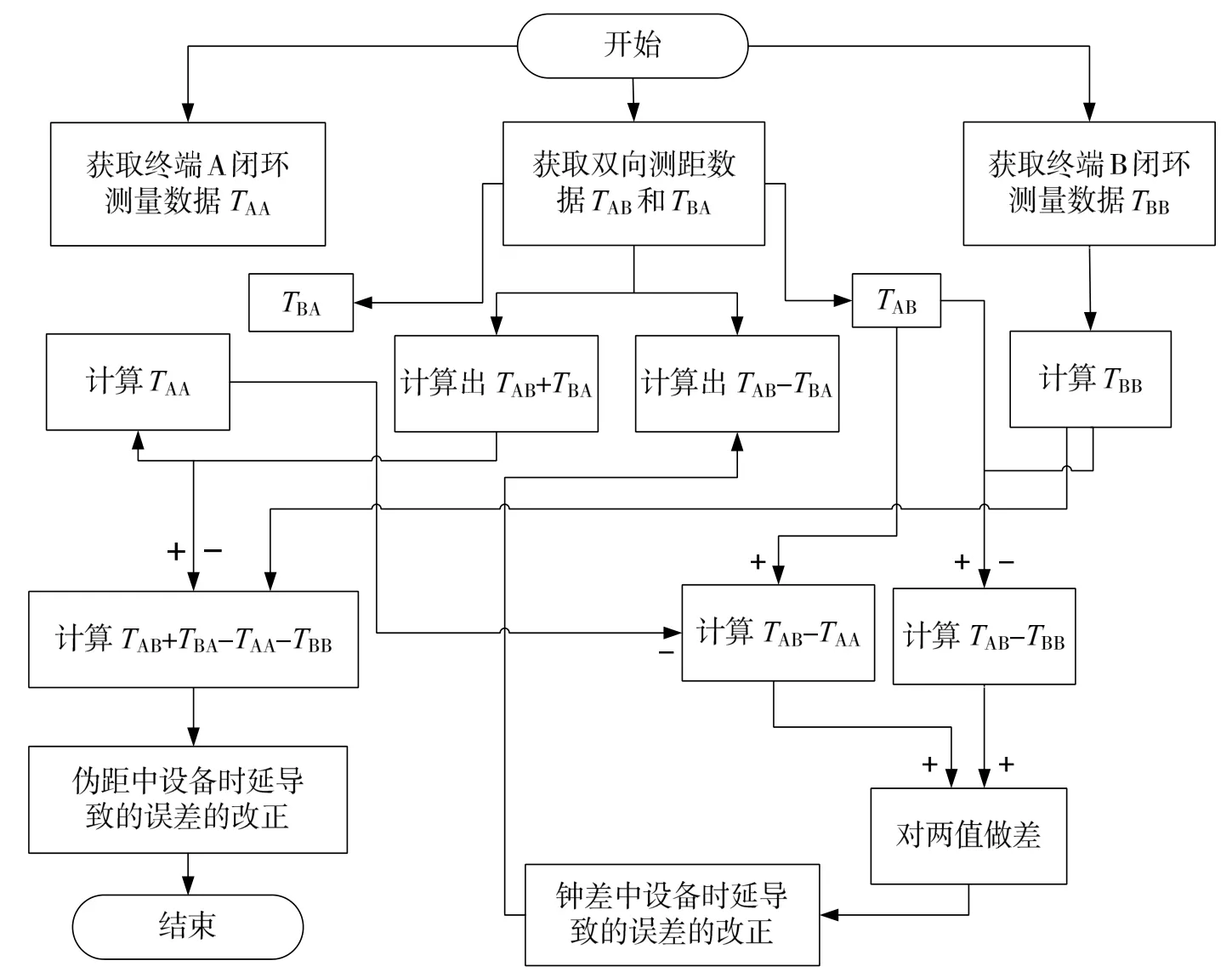
图7 DRTS终端闭环自校方法流程
根据图7所示流程,对DRTS系统搭建测试环路,测量得到各个测量环路的各组时间延迟数据,然后进行有关运算和改正。
4.3 设备时延校准方法的有效性
若DRTS的两个测距终端,具有设备在同一地点共址和使用不同源时钟的特点,那么两站的时钟差是不为零的,但是我们认为钟差相对于设备时延来说可以忽略不计。利用传输电缆模拟双向测距与时间同步路径,认为两套设备高度对称且不存在链路的差异。于是根据上述分析可以得到:

式(21)就是设备时延校准方法有效性的衡量标准[5,10]。
在我们进行的设备时延校准方法的有效性验证实验中,为了便于分析结果和保持对称性,各个测量链路中均采用60 m的传输电缆模拟传输链路。利用上述设备时延的测量方法,进行共48 h不间断的测量,每秒获取一个数据,得到了几组可供分析处理的数据。进行数据分析时,总共取了大约137×103个数据,其处理结果如图8所示。
图8(a)是双向测距与时间同步系统的对发对收测量环路的时延测量值之差,即TAB-TBA,这里面包含着终端设备收发信机的设备时延。图8(b)是终端A的闭环自校测量结果,即(tA-rA)部分,为双向测距与时间同步系统设备时延的组成部分。图8(c)是终端B的闭环自校测量结果,即(tB-rB)部分,也是双向测距与时间同步系统设备时延的组成部分。图8(d)是[(TAB-TBA)-(tA-rA)+(tB-rB)]值,即判断设备时延校准方法是否有效的衡量标准。分析表明,之值在-0.8~0.8ns之间变化,充分验证了设备时延校准方法的有效性,为DRTS系统的下一步设计提供了有用的参考数据。

图8 实验的测量结果
5 结论
通过对DRTS系统的原理进行分析可知,DRTS系统的设备时延包含在伪码测距的测距值与钟差值之中。本文在分析DRTS设备时延组成的基础上对DRTS设备时延提出了DRTS终端闭环校准方案,并通过实验验证了该方案的有效性,也为系统的下一步设计提供了有效的参考数据。
[1] 李星, 耿淑敏, 李垣陵.双向时间同步系统的设备时延校准技术研究[J].中国空间科学技术, 2011, 04: 23-29.
[2] 钟兴旺, 陈豪.双向单程距离与时差测量系统及零值标定方法[J].电子测量与仪器学报, 2009, 23(4): 13-17.
[3] 李梦, 马红皎.载波相位平滑伪距算法在双向测距与时间同步系统中的应用[J].时间频率学报, 2014, 37(4): 213-220.
[4] 马红皎, 吴华兵, 李梦, 等.一种双向测距与时间同步系统的设计与分析[J].时间频率学报, 2014, 37(1): 18-24.
[5] 黄坤超.时延测试方法研究[D].西安: 电子科技大学, 2007.
[6] 徐志乾.导航星座星间链路收发信机时延测量与标校技术研究[D].长沙: 国防科学技术大学, 2011.
[7] 魏海涛, 蔚保国, 李刚, 等.卫星导航设备时延精密标定方法与测试技术研究[J].中国科学: 物理学 力学 天文学, 2010, 40(5): 623-627.
[8] 黄凯冬, 尹仲琪, 胡勇.利用矢量网络分析仪测量时延特性的方法[J].电讯技术, 2007,47(1): 193-195.
[9] 王伟.导航接收机本地守时电路设计及其关键技术研究[D].武汉: 武汉理工大学, 2010.
[10] 原亮, 楚恒林, 王宏兵, 等.卫星导航设备组合时延测试方法研究[J].中国科学: 物理学 力学 天文学, 2011, 41(5): 629-634.
Calibration of device delay for dual ranging and time synchronization system
MA Hong-jiao1,2,3,LI Meng1,4,WU Hua-bing1,2,3,HU Yong-hui1,2,3
(1.National Time Service Center,Chinese Academy of Sciences,Xi′an 710600,China;2.Key Laboratory of Time and Frequency Primary Standard,National Time Service Center,Chinese Academy of Sciences,Xi′an 710600,China;3.Key Laboratory of Precision Navigation and Timing Technology,National Time Service Center,Chinese Academy of Sciences,Xi′an 710600,China;4.University of Chinese Academy of Sciences,Beijing 100049,China)
The dual ranging and time synchronization(DRTS) system is based on the dual one-way ranging measurement principal,so the device delay is included in the measurement results,which has a bad influence on the ranging accuracy for the DRTS system.Aiming at this device delay,a calibration method called DRTS terminal closed-loop calibration method is presented in this paper,and the experiments and analyses have verified the effectiveness of this method,which provides a significant reference for the future design of DRTS system.
dual one-way ranging; time synchronization; device delay
P127.1
A
1674-0637(2015)01-0030-08
10.13875/j.issn.1674-0637.2015-01-0030-08
2014-05-22
中国科学院“西部之光”人才培养计划资助项目(O905YR2601)
马红皎,男,博士,副研究员,主要从事时间频率传递、卫星导航研究。