内河船舶智能航行系统设计与实现*
2015-10-15大连海事大学航海学院王起超王笑琳马春超周斌斌
大连海事大学航海学院 王起超 王笑琳 马春超 周斌斌
内河船舶智能航行系统设计与实现*
大连海事大学航海学院 王起超 王笑琳 马春超 周斌斌
为进一步提高内河船舶的智能化和信息化水平,定义面向内河的船舶智能航行系统的概念,提出智能航行系统的框架结构。根据船舶通导设备及岸基云服务平台提供的信息支撑,设计12种智能预报警的类型、语音服务内容和图标,介绍偏航及桥区等智能预报警的算法流程,并最终展示 语音、警报灯和图标3种形式的智能预报警显示效果。该系统可实现船舶航行全过程中的智能预报警功能。
智能航行系统;智能预报警;内河船舶;语音服务内容;图标设计
党和国家高度重视内河航运的发展,2014年7月16日,国务院发布《关于珠江—西江经济带发展规划的批复》,原则同意珠江—西江经济带发展规划,这意味着珠江—西江经济带发展正式上升为国家战略[1]。2011年1月,国务院提出要用10年左右的时间,建成畅通、高效、平安、绿色的现代化内河水运体系。要建设现代化内河航运体系,首先应解决安全问题。内河航行环境复杂多变,桥梁林立、河道弯曲、渡口众多、水位涨落不定等[2],给船舶的安全航行带来很大的困扰,低智能化的船舶导航系统已不能适应内河航运的发展。
一、智能航行系统基本概念
智能航行系统是利用通导设备自动地感知并获取各种航行相关信息,并能实时地接受岸基云服务平台提供的各种信息,通过数据的运算与处理,为船舶驾驶员不断地提供各种预报警支持,以实现内河船舶安全航行的系统,系统总体结构见图1。
在信息采集模块中,一方面,船舶通导设备应用VTS、AIS、RFID、CCTV、北斗卫星等技术手段,形成多方位立体化的航运要素信息感知体系,实现船舶对助航设施、碍航物等航行环境的智能感知;另一方面,将先进的船岸一体化系统技术、通信技术、云计算等技术综合运用于岸基云服务平台,通过对交通设施、信息资源的实时采集、挖掘和处理,为智能预报警算法模块提供实时动态的信息支撑,提高船舶航行的安全和效率,岸基云服务平台功能流程见图2。

图1 系统总体结构

图2 岸基云服务平台功能流程
知识库是由一般的基础理论和原理(如航海学、轮机工程、人工智能、计算机科学、数据库及数据结构、大地测量学、地理信息系统等)以及直接和间接经验构成,它是判定预报警类别的理论基础。
规则库主要是指《内河避碰规则》。为加强我国内河交通管理,维护船舶航行秩序,保障人民生命财产的安全,促进水运事业的发展,实现交通运输现代化,交通运输部制定了《内河避碰规则》。在中华人民共和国境内江河、湖泊、水库、运河等通航水域及其港口航行、停泊和作业的一切船舶、排筏均应当遵守本规则[3]。
物标数据库(空间及特征)主要用于存储信息采集模块提供的物标数据,这些物标是实现智能预报警的重要依据,分为三种类型:在电子航道图中,各种航标、沉船/暗礁等水下危险物、台风是以“点物标”的形式存在的;桥区、渡口、浅水区等区域的预警线是以“线物标”的形式存在的;而施工作业区/军事演习区、桥区、渡口、危险区、航道等区域的报警面是以“面物标”的形式存在的。
二、智能预报警的类型、语音服务内容及图标集
首先建立12种内河船舶智能预报警类型,并结合内河的交通特点,设计了相应的语音服务内容及图标集,具体内容如表1所示。

表1 智能预报警类型表

续表
三、智能预报警算法设计
智能预报警算法模块由多个算法组成,以偏航报警算法及桥区预报警算法为例进行介绍。
(一)偏航报警算法
为了充分利用内河航道和减少船舶会遇几率,航道采用分道通航制,所以将可航的深水安全航道分为上行区域和下行区域,船舶航行时严格按照上行和下行规定,在相应的区域航行[4]。把上行和下行区域的所有航道面物标组成一个航道面物标集合,用于查询、对比船舶的航向,以判断船舶是否偏离航道或驶入反向航道。以西江为例,将起始港和目的港之间的内河深水航道上行和下行区域分成若干个航道面物标,如图3所示。根据S-57数据标准,这些航道面物标有如下属性[5]:
名称:深水航道部分;物标类:DWRTPT[41]
属性:状况STATUS 属性值:14(公共的) 区别于显示类
交通流TRAFIC 属性值:【1】上行 【2】下行

图3 航道数据组织示意图
当船舶航行时,遍历所航行区域的航道面物标,获取航道面物标集合。如果航道面物标集合为空,则表明船舶已经偏离深水航道,进入浅水危险区域,进行“偏离航道报警”。如果航道面物标集合不为空,则获取航道面物标的交通流属性,与船舶的航行方向进行比较,如果取值一致,则表明船舶航行于正确的航道上,不进行报警;如果航道面物标的交通流属性与船舶航向不一致,则表明船舶已经偏航到反向航道上,进行“反向航道报警”。对于偏航到浅水区域或驶入反向航道的船舶,智能航行系统应发出声音报警,并在屏幕上显示报警图标,提醒驾驶员采取相应的措施,以避免事故发生,具体报警算法流程见图4。
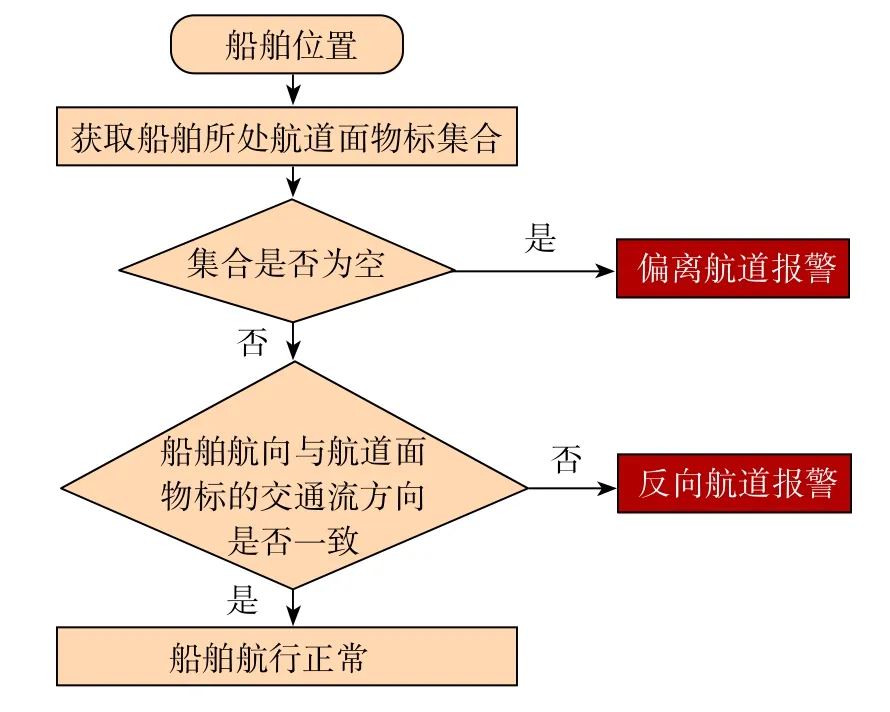
图4 偏航报警算法流程图
(二)桥区预报警算法
在电子航道图中,增加预警线物标和报警面物标数据,以实现桥区预报警功能。以广西贵港郁江大桥为例,如图5所示,以桥墩连线为中心线,在桥梁的两侧各设置一个预警线物标和一个报警面物标,其中,红色的区域标志为上行区域,而黄色的区域标志为下行区域。根据S-57数据标准,预警线物标和报警面物标具有其自身独特的属性,便于区分物标,具体属性如下[5]:
1. 报警面物标
名称:桥区航道;物标类:FAIRWY[51]
属性:状况STATUS 属性值:9(强制性的) 区别于显示类
交通流TRAFIC 属性值:【1】上行 【2】下行
2. 预警线物标
名称:距离标志;物标类:DISMAR[44]
属性:距离标志类CATDIS 属性值:2(杆形可视标志)
交通流TRAFIC 属性值:【1】上行 【2】下行
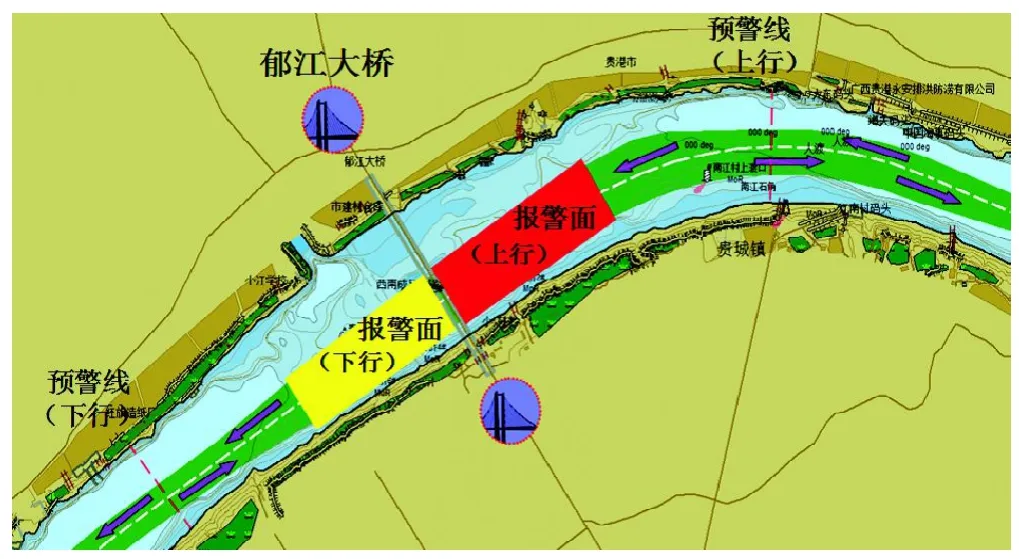
图5 桥区数据组织示意图
船舶航行过程中,判断船舶与桥梁的距离是否小于预警设定值,如果距离大于预警设定值,则没有危险;否则,则判断船舶航向与桥区预警线物标的交通流是否一致。如果不一致,说明船舶已驶离桥区,不需要进行预报警;如果一致,则把船舶看成一点,遍历包含船舶所在位置的所有面物标,获取面物标集合。根据面物标的属性判断面物标集合中是否包含桥区报警面物标,如果不包含,智能航行系统则进行桥区预警,提醒驾驶员前方有大桥;如果包含,就进行桥区报警,发出声音报警信号,提醒驾驶员谨慎驾驶,避免发生撞桥事故,具体报警算法流程见图6。
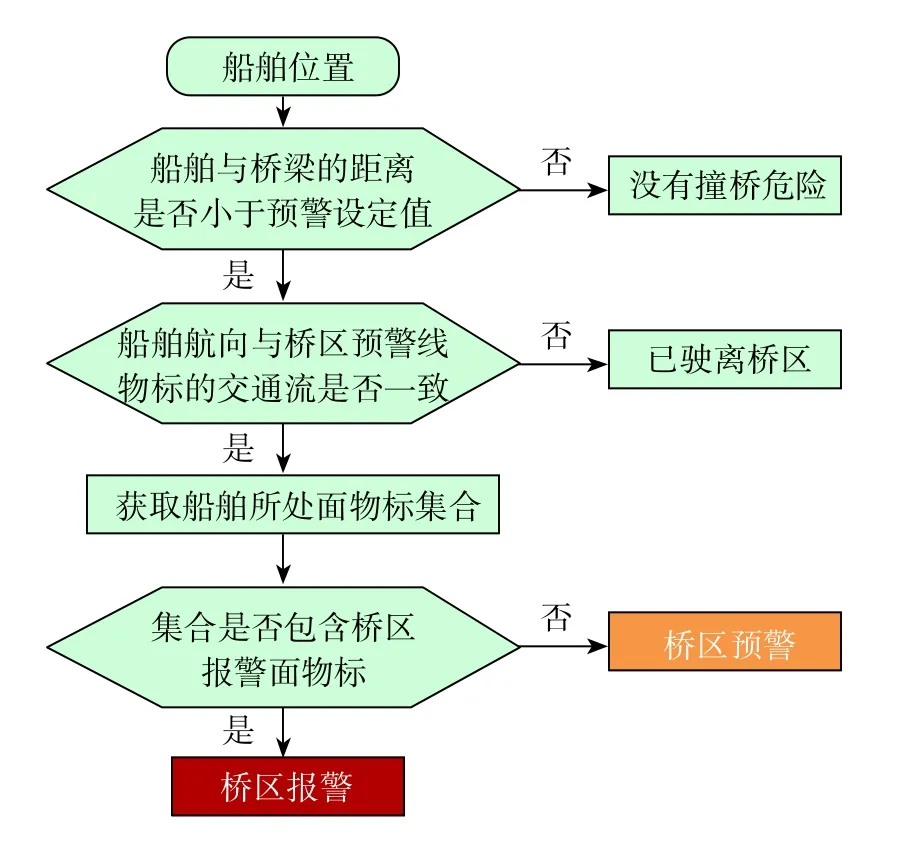
图6 桥区预报警算法流程图
四、智能航行系统的实现
利用数据库管理系统Structured Query Language(SQL)Server 2005、软件开发工具Visual C++,初步实现西江航运干线南宁至贵港航段(总长度273.0 km)的智能航行系统的开发,利用船舶自身通导设备和岸基云服务平台来感知获取航行相关信息,通过数据的运算与处理,为船舶驾驶员不断地提供各种预报警支持,以实现内河船舶安全航行,航标异常报警、船闸预警及渡口区报警的运行界面如图7所示。
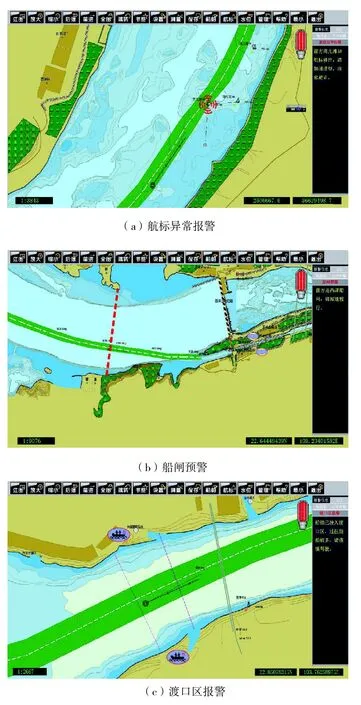
图7 系统运行界面
应用智能航行系统可以更好地对内河水域进行实时监控,通过为船舶驾驶员不断地提供各种预报警支持,及时对内河水域的水上交通事故进行预判断,具有实际应用价值。
[1]编辑部.《珠江—西江经济带发展规划》获批跨省区流域经济合作开启新模式[J].财经界,2014(8):94-96.
[2]程细得.内河船舶操纵及避碰决策优化研究[D].武汉:武汉理工大学,2007.
[3]丁继民,杨建国.船舶避碰与信号[M].大连:大连海事大学出版社,2010.
[4]陈莹.长江智能航运系统网络及通信协议的设计与实现[D].大连:大连海事大学,2008.
[5]周程熹,赵德鹏,周曾磐,等.IHO数字海道测量数据传输标准(S-57篇)[M].大连:大连海事大学出版社,1999.
交通运输部长江黄金水道综合信息服务关键技术研究(802070);中央高校基本科研业务费专项资金资助项目(3132014309)
