基于AP203的4R机械手运动学仿真软件研究
2015-10-14郭俊卿
陶 柯,郭俊卿
(沈阳工业大学研究生学院,辽宁沈阳110870)
基于AP203的4R机械手运动学仿真软件研究
陶柯,郭俊卿
(沈阳工业大学研究生学院,辽宁沈阳110870)
基于AP203标准,采用DirectX图形接口对图形文件进行图形重构,创建一个4R机械手运行学仿真软件。通过对某一4R机械手运动学的分析研究,验证仿真软件编写的正确性。分别采用二次和三次插值函数方式对各关节运动变量进行插值,实现4R机械手的轨迹规划,并对两种插值误差做了对比分析。
AP203;运动学;仿真
0 引言
AP203是一种集成了ISO 10303的协议,用于表征三维产品形状[1]。本文将对AP203协议下的图形文件进行解析重构,为仿真系统提供基础框架。
针对4R机械手运动学方面,本文将采用D-H法进行运动学分析,并采用三次样条曲线法对机械手运动轨迹进行研究,为仿真系统提供验证素材。
1 AP203协议下的图形文件处理
1.1图形文件解析
AP203协议能够为产品数据的描述提供中性机制。本文采用由SolidWorks软件生成的基于AP203协议的STEP文件为图形文件。STEP图形文件的几何体描述是由:Shell(壳)、Face(面)、Loop(环)、Edge(边)和Vertex(顶点)逐级定义,如图1所示[2]。

图1 STEP模型文件架构
其中,Shell分为OpenShell和ClosedShell。本仿真系统采用Closed⁃Shell的图形文件进行解析。
依据上述模型文件架构,本文将采取逐级检索提取相关信息的办法对模型文件进行解析。检索方法如下所示:

1.2图形文件重构
常用的3D图形接口有DirectX和OpenGL两种,DirectX依赖于硬件,可以用硬件加速,OpenGL与硬件无关,用软件进行加速。DirectX与OpenGL的接口文件分别为.X文件和.obj文件,两者都是将顶点作为基本单元来描绘面信息。本文将采用DirectX接口来实现图形文件重构。生成的图形信息描述构成如下所示:

基于STEP文件和DirectX图形接口,创建了一个图形显示界面,如图2所示。

图2 图形显示界面
2 4R机械手运动学验证
2.1建立系统坐标系
系统坐标系是做机械手运动学分析的基础,它决定了机械手各关节运动方向。基于右手法则,本论文建立的系统坐标系图3所示。

图3 机械手关节坐标系
2.2坐标系矩阵变换
(1)运动学分析求解
本文将采用机器人学中齐次坐标变换法(即D-H法)[3]对机械手关节模型进行正向求解,得到各关节相对于系统基坐标的矩阵描述可以表示为:

当已知关节位置或位姿描述数值时,可通过运动学反向求解求解各关节运动方向及角度。
求解过程如下:

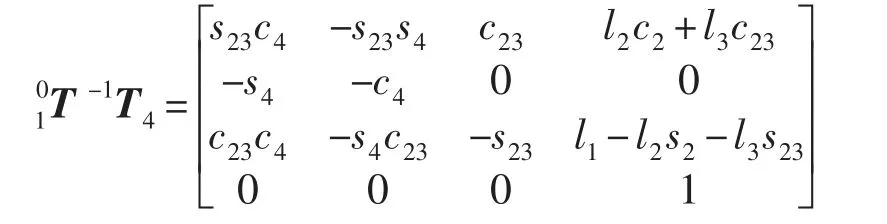
矩阵对应项相等有:

由上述公式整理得:
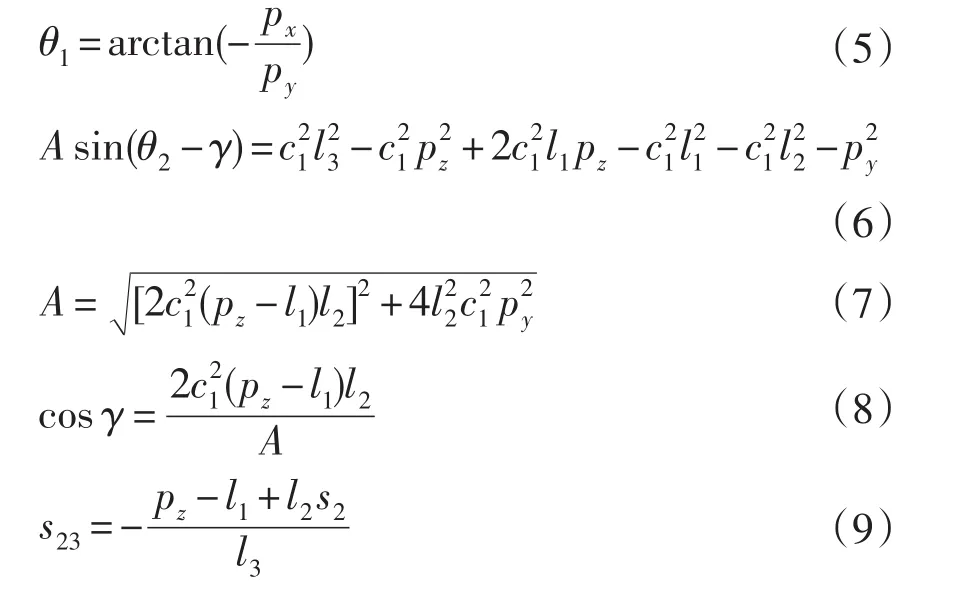
由上述公式可以求得θ1、θ2、θ3,θ4为末端关节旋转角度,影响手爪姿态,对手爪位置无影响,故暂不需要求解,可根据需要进行实际调整。
(2)仿真软件验证
本文设定各杆长如表1所示:

表1 4R机械手参数
将关节运动角度θ1=-20°,θ2=30°,θ3=40°赋值到仿真软件中得到关节运动状态,如图4所示:

图4 机械手运动状态
仿真软件显示末端关节位置,如图5所示。
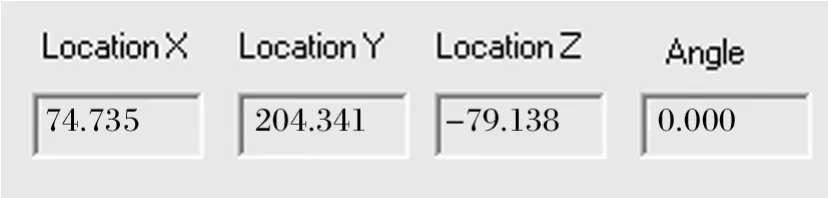
图5 机械手位置坐标
通过理论分析及软件验证,可以确定理论分析的正确性,以及仿真软件的可用性。
3 4R机械手轨迹规划
3.1机械手轨迹规划策略
所谓机械手轨迹规划就是机械手按作业要求,计算出预期的运动轨迹,再按此轨迹进行运动作业。本文将假定机械手按空间直线运动,设定运动初始点为:(0.000,360.000,179.983),运动终止点为(74.389,204.384,-81.308)。将初始点和终止点连线,并进行10等分,得到的采样点,将其代入运动反解公式,进行关节角度反解。为了方便计算,编制一个软件进行上述求解,如图6所示。
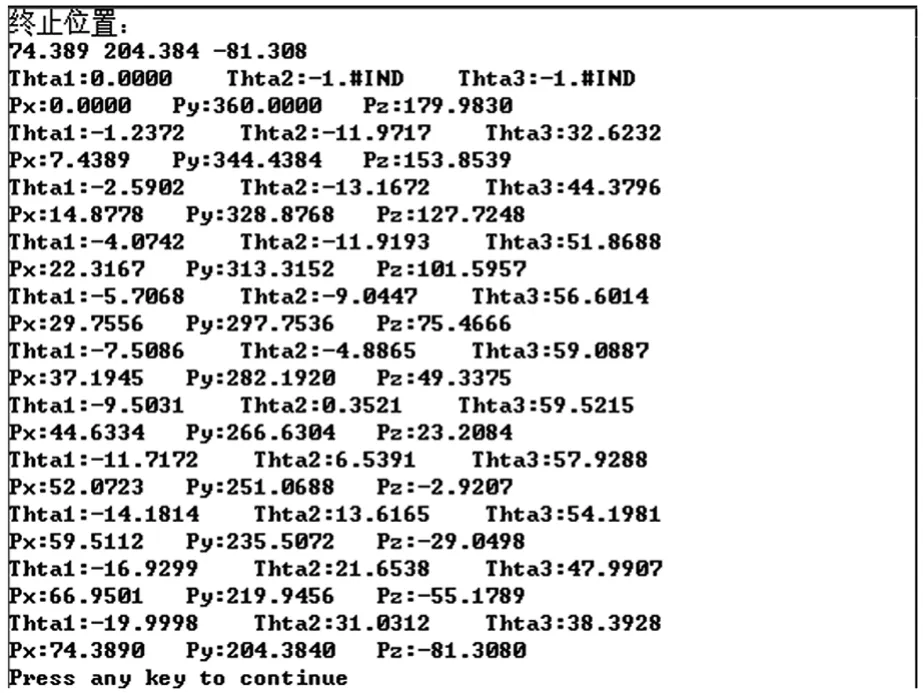
图6 部分计算结果
3.2二次函数插值法控制关节运动
设定机械手由初始位置到终止位置历经5 s,得到相应的二次曲线,如图7所示。

图7 各关节旋转角度二次曲线
得到相应的二次函数分别为:

将得到的二次函数赋值给仿真软件,观察仿真软件运动,得到5 s后末端关节位置,如图8所示。

图8 末端关节位置
3.3三次函数插值法控制关节运动
设定机械手由初始位置到终止位置历经5s,得到相应的三次曲线,如图9所示。

图9 各关节旋转角度三次曲线
得到相应的三次样条函数分别为:
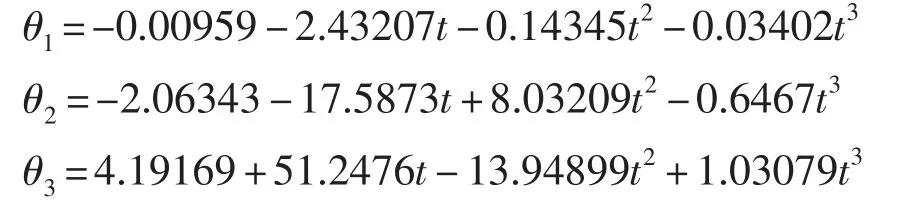
将得到的三次样条函数赋值给仿真软件,观察仿真软件运动,得到5 s后末端关节位置,如图10所示。

图10 末端关节位置
3.4关节运动误差分析
5 s后末端关节位置与终止位置存在偏差,原因在于5 s后的关节位置是经三次样条函数计算运动后得到的位置,是三次样条函数拟合后的采用点,与离散生成的采用点不完全重合。软件得到的末端关节位置比较接近终止位置,只需将末端关节在一个较小空间域运动到终止位置即可得到准确的最终位置。
关节遵循二次函数和三次函数都可以接近最终的目标点。为了判别采用二次函数和三次函数控制各关节运动的误差,本文引入欧式距离公式:

其中,(x0,y0,z0)为运动终止点,即(74.389,204.384,-81.308);(x1,y1,z1)为各关节遵循一定曲线在第5秒到达的位置。
分别将各关节通过二次曲线和三次曲线控制得到的运动点带入欧式距离公式,得到:二次函数的欧式距离为4.722 mm,三次函数的欧式距离为2.200 mm。欧式距离越小,表明越接近最终目标点。即通过三次函数控制各关节运动要优于用二次函数控制各关节运动。
4 结论
经上述研究得出如下结论。
(1)基于AP203标准,可方便地创建一个4R机械手运动学仿真软件。实现了文件的可视化显示。经机械手运动学分析实例,验证了该软件的编制方案可行性与图形解析的正确性。
(2)在对4R机械手的运动学轨迹实现中,采用三次插值函数较二次插值的欧式距离更小,运动更精确。
(3)本软件的研究方法为其他机构形式的机械手的仿真研究提供了参考借鉴。
[1]GB/T 16656.203-1997.工业自动化系统与集成产品数据的表达与交换[S].
[2]祝海涛,邱长华,刘崇.STEP-NC加工特征提取的研究[J].哈尔滨工程大学学报,2006,27(4):565-569.
[3]熊有伦.机器人技术基础[M].武汉:华中科技大学出版社,2004.
[4]陈婷婷.4R多关节轮毂加工上下料机械手的运动分析与研究[D].沈阳:沈阳工业大学,2012.
Simulation Software of the 4R Manipulator in Kinesiology Based on AP203
TAO Ke,GUO Jun-qing
(Shenyang University of Technology,Shenyang110870,China)
Based on AP203 standard,this paper will use DirectX graphics interface for the reconstruction of the graphics file to create a 4R manipulator kinematic simulation software.Through the analysis of the kinematics of a 4R manipulator,the correctness of the simulation software is verified.Two times and three interpolation functions are used to carry out interpolation for each joint movement variable,and the trajectory planning of 4R manipulator is realized,and the comparison of two interpolation errors is made.
AP203;kinesiology;simulation
TP241
A文献标识码:1009-9492(2015)12-0106-04
10.3969/j.issn.1009-9492.2015.12.030
陶柯,男,1958年生,辽宁沈阳人,硕士,副教授。研究领域;机电系统的控制与优化。已发表论文9篇。
(编辑:向飞)
2015-06-17
