基于磁链观测电压定向的PWM整流器矢量控制研究
2015-10-14郭磊王丹刁亮
郭磊,王丹,刁亮
基于磁链观测电压定向的PWM整流器矢量控制研究
郭磊,王丹,刁亮
(大连海事大学,辽宁大连 116026)
电压定向的矢量控制是PWM整流器常用的控制策略,本文在此控制策略基础上进行改进,建立无电压传感器的矢量控制模型。采用类似异步电机磁链观测的方式构造磁链矢量观测磁链,依据磁链矢量和电压矢量的关系获得电压矢量的角度,以达到省掉交流电压传感器,降低成本的目的。设计了电压角度观测器,并在MATLAB/simulink环境下构造了磁链观测电压定向的PWM整流器矢量控制仿真模型,验证了观测的可实现性和控制的良好性能。
矢量控制 磁链观测 电压定向 无电网电压传感器
0 引言
PWM整流器具有输入电流正弦、功率因数可控、可双向流动等优点[1],因此其作为谐波抑制和无功补偿的一种有效的方法被广泛应用。矢量控制是PWM整流器一种常用的控制策略,基于电压定向的矢量控制策略可实现电流无静差、电流有功分量和无功分量的解耦控制[2],应用此控制策略的PWM整流器通常需要检测三相电网电压、输入电流和直流母线电压,电网电压主要用于提供同步旋转坐标变换的空间位置信号,传感器较多,增加PWM整流器的成本,限制其应用范围。PWM整流器和逆变器供电的三相交流电机定子电路有很大的相似性[3],因此可采用交流电机磁链观测的方式间接获得磁链矢量空间位置,再根据电压和磁链的关系得到电压矢量角,达到省掉电网电压传感器的目的。既保留电压定向控制策略的优点,又降低了开发成本。
近几年,对于积分初值未知带来的直流偏置问题相继提出了多种磁链观测的新方法。文献[3-4]通过加入几个持续时间为T的零电压矢量观测电网磁链的初始值;文献[5]通过串联LPF和HPF代替纯积分器;文献[6]应用一阶低通滤波器代替纯积分器,并对其进行补偿。这几种方法都可解决直流偏置问题,使磁链观测获得良好的效果。本文改进文献[6]的方法用于观测电压角度,实现磁链观测电压定向的PWM整流器。
本文在充分分析交流电机磁链观测的基础上,建立PWM整流电压矢量角的观测模型,并进行了仿真研究,验证了模型的可行性。
1 电压角度的观测
网侧PWM整流器主电路如下图所示。
由PWM整流器相关理论可知,交流侧输出的三相相电压和各相桥臂开关函数SSS之间存在如下的关系:

式中,vvv为PWM整流器输出的三相交流相电压;SSS为各相桥臂的开关函数,定义上桥臂功率元件开通为1、下桥臂功率元件开通为0;为直流电压。
对其进行3s/2s变换得vv如下式[7]

式中,vv别为对应的两相静止坐标系分量。
由上式可知,vv可由直流电压和功率器件开关函数观测获得。
根据PWM整流器在两相静止坐标系中的数学模型,在忽略进线电抗器和线路的电阻R时,电压方程可写为
可以应用上式进行电压估计得到无电压传感器控制,但是采用微分运算,可能会引起噪声干扰,影响控制效果,且不利于系统的稳定。因此对两侧进行积分得到磁链分量[8]
式中,ψψ分别为虚拟电网磁链矢量ψ的分量。
根据上面的关系式可知,电网电压矢量U超前于电网磁链矢量ψ90°电角度。依据下面的关系示意图即可对电网电压矢量空间角度进行准确的观测。
电压矢量空间角度观测有
(2)
这样就可以通过对ψψ的观测获得电压矢量空间位置角度。
2 PWM整流器的电压定向矢量控制
在同步旋转坐标系中,当坐标系的d轴定向于电网电压矢量时,有u=Ug, u=0,可实现电压定向。因此PWM整流器的电压定向矢量控制的数学模型为:
式中,Ug为电网相电压幅值;SS为开关函数在坐标下的表示;u为电网电压的轴分量;为电网电压频率;vv为PWM整流器交流侧电压的分量。
推导控制方程如下式所示,引入电流反馈量ωLiωLi可实现控制的完全解耦,i控制有功功率、i控制无功功率;调节i可控制有功的大小,进而控制直流电压的大小。
3 磁链误差补偿
由于虚拟磁链的初始值未知,采用式(1)进行观测不可避免的会引入直流偏置问题,导致磁链轨迹圆心以相应直流偏置大小偏离坐标系原点,在这种情况下进行磁链观测势必会造成观测的不准确,降低PWM整流器的控制精度。
对于此问题,可以用一阶低通滤波器取代纯积分器,实际效果上相当于纯积分器加上一阶高通滤波器[4],但是其稳定时间较长,降低启动过程的动态响应。若对一阶低通滤波器进行相应的补偿,就可提高其动态性能,提高观测准确性。
已知电网电压角频率,则稳定状态下,误差补偿的交流输入磁链与交流侧电压矢量存在下面的关系:

设低通滤波器的截止频率为同步角频率的倍,通常取0.2-0.3为最优设置范围[5],通过仿真验证,这里取值为0.2达到比较理想的效果。此时,经过一阶低通滤波后的交流磁链矢量与交流侧输入电压之间存在如下的关系:
(4)
式中ψ'ψ'为交流侧输入未经补偿的虚拟磁链的、分量。
结合式(4)和式(5),可得到交流侧虚拟磁链与未经补偿虚拟磁链之间的关系:
(5)
ψ'ψ'为幅值相同但是相位不同的时间向量,满足如下的关系:
(6)
“爸,农场征集农业生产的老物件呢。”听了我的话,老爸从库房里翻出了那双高腰雨靴,穿上来回走着说:“这个物件咋样?这以前可是咱庄稼人的宝啊。”
结合式 (6) 和式 (7) 可得交流侧虚拟磁链补偿公式为[6]:
(7)
搭建电网虚拟磁链观测模型如下图:
通过上面的模型观测得到ψψ,然后根据式(2)的关系即可算出电网电压矢量空间位置角度,用于坐标变换完成电压定向。
4 仿真验证
为了验证理论的可行性,在MATLAB/simulink环境下对磁链观测电压定向的PWM整流器进行了仿真实验,系统框图如图4所示。图中ii分别为输入电流的dq轴分量,ii为相应的给定值,vv为PI运算后得到的dq轴给定电压。仿真参数如下:输入三相相电压有效值220 V、50 Hz,输入电阻100 mΩ,电感2 mH,直流电容2 mF;给定直流电压为560V,无功给定为0,使其工作在功率因数为1状态;直流电压环PI参数:为0.6、为20;dq轴电流环PI参数:为9.6、为24;仿真时间为1s,同时为了验证系统的试用范围,进行了两套仿真,一是设置在0.5 s系统由整流状态转变为逆变,二是0.5 s由空载变为加入20 kW负载,在两种情景下验证角度观测的准确性。
控制中省略电压传感器,但为了观测控制效果,得到功率因数和交流侧电流质量,取a相电压波形与控制电流进行对比观察。由整流到逆变的仿真结果如图5-9所示:图5为仿真直流电压波形;图6为整流状态的启动期间电压电流波形;图7为整流逆变切换期间电压电流波形;图8为电压矢量空间角度正余弦值跟踪情况,实线为电网电压实际波形,虚线为观测角度的正余弦波形;图9为角度跟踪误差波形;图10为空载到加入负载情况下电压电流变化波形。
由图5可知直流电压比较稳定,在0.5 s整流状态变为逆变状态时发生波动,并很快调整到560 V,稳定时间在0.1 s内。
由图6可知,启动时刻电流较大,但在一个工频周期内电流就减小到正常值并稳定,结合图8观测的电压矢量空间角度可知,在第一个周期内电压角度处于观测状态,定向角度不准确导致启动电流较大,观测时间小于一个工频周期,系统迅速进入稳定运行状态,整流状态下电压电流同相位,功率因数为1,无功功率接近为0;0.5 s后PWM整流器由整流状态突变为逆变状态,从图7知,转换状态平滑,同样在一个工频周期内完成转换,电压电流反向,无功功率接近0,角度观测比较准确,整体动态性能良好。
观察图8、9两图可知,在第一个工频周期内误差较大,第二个周期已经大体跟踪正确,经过两个周期后观测值已经完全跟踪上了实际值,但还有较小的误差,角度差值在1.5°范围内波动,此角度大小在误差允许范围内,满足控制精度要求。
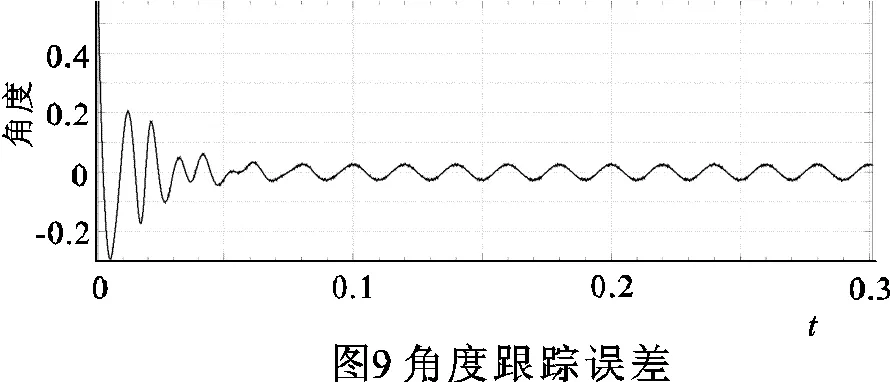
图10为初始状态空载到负载突增的电压电流波形。初始状态为空载,输入电流接近为0,在此状态下仍可进行比较准确的角度观测,此时的角度观测波形同图8,说明观测器在电流接近为零的情况下同样有比较好的观测效果;突加负载并未对角度观测造成较大的干扰,电流迅速增加,电压电流同相,同样运行在单位功率因数状态下。通过仿真,证明了电压矢量空间角度观测器的准确性和实用性。
5 结论
本文研究了基于磁链观测电压定向的PWM整流器矢量控制策略。利用磁链观测的方式获取电网电压矢量的空间角度,将虚拟电压作为定向矢量,实现无电压传感器的电压定向的矢量控制,降低了PWM整流器的开发成本。仿真结果表明:观测器动态响应较快,角度观测准确,在空载、整流、逆变状态之间切换时没有大的冲击电流,变化平缓,实现了与传统控制策略相同的控制效果。
[1] 杨勇, 阮毅, 汤燕燕等. 基于锁相环和虚拟磁链的三相并网逆变器[J]. 电工技术学报, 2010,25(4):109-114.
[2] 赵梅花, 阮毅, 杨勇. 基于虚拟电网磁链定向的网侧变换器矢量控制研究[J]. 电机与控制应用, 2010, 37(2):17-20.
[3] 訾振宁, 林飞, 马颖涛. PWM整流器无电网电压传感器控制策略研究[J]. 电气传动, 2009,39(10):27-30.
[4] 赵仁德, 贺益康. PWM整流器虚拟电网磁链定向矢量控制仿真研究[J]. 电力系统及其自动化学报, 2005,17(5):94-98.
[5] 张星, 瞿文龙, 陆海峰. 一种能消除直流偏置和稳态误差的电压型磁链观测器[J]. 电工电能新技术, 2006,25(1):39-42.
[6] 宋小亮, 李杰, 蔚然等. 基于虚拟电网磁链定向的电压型PWM变换器研究[J]. 电气传动自动化,2009,31(6):1-6.
[7] 杜荣茂, 陈小强, 景利学. PWM整流器两种空间矢量控制策略的比较研究[J]. 电气传动自动化, 2012,34(3):6-13.
[8] 刘其辉, 谢孟丽. 双馈式变速恒频风力发电机的无电压传感器控制策略[J]. 太阳能学报, 2012, 33(12):2172-2177.
Research on Vector Control of PWM Rectifiers Based on Virtual Flux and Line Voltage Orient
Guo Lei, Wang Dan, Diao Liang
(Daliang Maritime University, Daliang 116026, Loangning, China)
TM461
A
1003-4862(2015)01-0032-05
2014-09-04
国家自然科学基金(61273137,51209026, 61074017),辽宁省教育厅(L2013202),中央高校基本科研业务费(3132014047)。
郭磊(1990-),男,硕士研究生。研究方向:电机工程。