基于compactRIO三相PWM整流控制器的设计
2015-10-14徐朋曾启帆向东孟光伟江潇
徐朋 ,曾启帆 ,向东 ,孟光伟,江潇
基于compactRIO三相PWM整流控制器的设计
徐朋1,曾启帆1,向东1,孟光伟1,江潇2
(1.海军工程大学,武汉 430033;2. 92724部队,山东青岛266109)
使用NI公司的LabVIEW2012和cRIO9081软、硬件平台成功搭建一套三相两电平PWM整流控制器。控制器采用电压、电流双闭环控制结构和空间矢量调制算法,其核心算法全部在compactRIO的FPGA中完成,具实时性高,运算并行,时序稳定等特点。实验和仿真结果验证了该设计的正确性与有效性。
compactRIO FPGA PWM整流 双闭环控制
0 引言
三相电压型PWM整流能实现能量双向流动、输入功率因数为1、低输入电流谐波含量、输出电压可控[1]。它还可以有效地抑制电网谐波和进行电网的无功补偿,弥补了传统整流的不足。迄今为止,国内外学者提出了多种PWM整流的控制方法。其中电压电流双闭环控制、直接功率控制和基于现代控制理论的新策略等由于效果较理想,成为研究的热点[2]。直接动率控制开关频率不固定,对算法要求高,实现难度大。电压电流双闭环控制实现相对简单,控制算法比较成熟,被大多设计者采用。PWM调制策略的研究中,SVPWM电压利用率高,谐波畸变率小,取代了SPWM成为最受欢迎的调制策略[3]。
国内的整流控制器一般由微处理器(MCU和DSP)或专用控制芯片(ASIC)承担。然而,DSP本身存在固有的缺陷,其串行时序的运算方式在高速环境下很容易出现时序问题,导致程序失控;此外,微处理器中不确定的中断响应也会导致PWM脉冲的相位抖动[4]。现场可编程门阵列(FPGA)并行运算能力强大,能同时输出多路信号,真正做到同步输出。而且,FPGA的编程语言是硬件描述语言,十分便于实时控制。但是FPGA内部资源有限,要实现复杂算法则需要外接其他芯片。compactRIO内部是典型的FPGA+通用CPU的结构,程序可灵活地规划到FPGA或CPU中。compactRIO通过LabVIEW的软件平台开发,借助LabVIEW强大的虚拟界面,能在线进行数据观测和参数修改。
1 主电路拓扑和控制器结构
1.1主电路拓扑
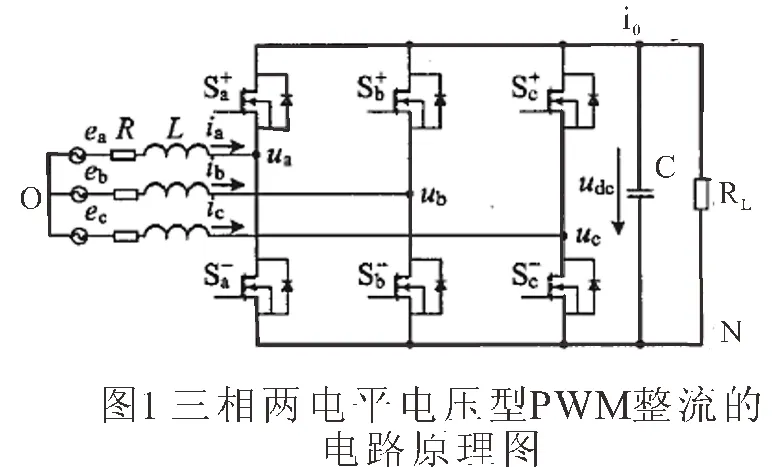
1.2 控制结构
本文采用的是电压电流双闭环PI控制,根据文献[5]的方法,本文的控制结构如图2所示。
2 控制器设计
2.1硬件结构
NI公司的CompactRIO是可重复配置的控制与采集系统,采用开放式嵌入式体系结构,配置小尺寸、高坚固性和可热插拔工业I/O模块,与传统的总线系统相比,具有体积紧凑、可靠性高等优点[6-7]。
本设计采用的CompactRIO控制器由CPU模块cRIO-9081、模拟量输入模块NI9220、高速数字I/O模块NI9041等组成。cRIO-9081模块包括1.06 GHz双核CPU,主频40 MHz的LX75可重置FPGA和实时软件操作系统LabVIEW。I/O模块NI9220,NI9041等由FPGA直接控制。硬件组成结构如图3所示。
本系统的核心算法全部在CompactRIO上的FPGA内完成,波形监测与分析程序在CompactRIO上的实时CPU上完成。FPGA与CPU之间通过高速度总线PCI Bus传递数据,而开发计算机通过网线与CompactRIO联接,完成程序开发和实时参数修改及显示。
NI9220是16通道16位模拟输入模块,电压、电流信号通过此模块采集,经A/D转换后传递给CompactRIO。它的最大采样频率可达100 kS/s(周期10 μs),可以快速无差地采集系统的电流和电压,精度可达微秒级别。NI9041是8通道的高速双向数字I/O模块,控制器中产生的六路PWM调制信号通过此模块经驱动电路放大后输出给IGBT整流桥。

2.2软件设计
与基于事件触发的C语言等编程语言不同,LabVIEW采用的数据流结构,这与FPGA的并行运算特性能很好的兼容。根据LabVIEW设计特点,程序被分为三个循环,每个循环为程序的一个模块:数据采集模块、主控制模块、PWM处理和输出模块。不同循环间通过局部变量传递数据。
1)数据采集模块
数据采集模块对NI9220采集的电压、电流信号进行数据处理,校正放大倍数,设置采样频率。本数据采集循环的周期设置为50 μs,即信号采样频率为20 kS/s。
2)主控制模块
此模块为软件程序的核心,电压、电流信号被输送给主控制模块后,进行坐标系变换,PI双闭环控制和SVPWM计算,最后输出SVPWM的三相调制波。主控制模块结构如图4所示。
3)PWM处理和输出模块
此模块将SVPWM调制波与周期固定的载波比较转变成PWM脉冲,再经过毛刺处理和死区处理,得到六路PWM脉冲信号并送给NI9041。PWM处理和输出模块采用定时循环结构,循环频率固定为FPGA的主频—40 MHz,保证了输出PWM波形的精度和时序。

2.3 FPGA程序的优化
LabVIEW FPGA程序设计是基于循环结构的。一般来说,循环周期越短,有利于提高程序的动态响应;循环周期越稳定,又有利于保证程序间严格的时序关系。
为了保证控制的精确性,主控制模块的循环周期应小于PWM载波周期的一半。当控制程序运行时间超过循环周期时,必须进行程序设计优化。
1)让循环内部的一些代码嵌套在单周期定时循环(SCTL)中,并使此循环只运行一次,目的并不是使程序循环,而是强制限定编译器让程序必须在一个很短的定时周期内完成[8]。
2)如果程序无法在一个定时周期内完成,可把程序用反馈节点分成几份,反馈节点作用类似寄存器,程序相当于被流水线化,多线程同步运行。
因为本设计的开关频率固定为10 kHz,需保证其载波频率固定。载波生成模块被放在PWM处理和输出模块所在的定时循环中,用计数程序生成。此定时循环频率为40 MHz,所以误差在25 ns之内。
3 仿真与实验分析
为了验证上述方案的可行性和有效性,本文分别搭建了仿真平台和实验平台。表1给出了该三相电压型PWM整流器的参数。
图5(a)为在matlab/simulink仿真环境下的交流侧A相电源电压E和电流波形I。
图5(b)为直流侧电压U的波形。为了便于观测,matlab仿真中的电流在数值上都放大了10倍。从仿真结果可以看出,EI功率因数基本为1,U经过一段时间后达到指定值。
实验样机的整流桥型号为TOSHIBA公司的MG180V2YS40,实验的电流波形由LT208-S7传感器采集,电压波形由LV28-P传感器采集。死区时间设置为5 μs。
图6为实验中的电压电流波形,右图为U由不控整流到PWM整流的动态变化,可以看出,实验结果和仿真结果基本一致,证明了方案的可行性和正确性。
4 结语
本文以compactRIO控制器为核心,提出了一种三相PWM整流器的实现方案,整流器的控制算法全部都在FPGA中实现,并进行了优化,使控制器的执行速度有很大的提升。仿真和实验结果验证了设计方案的可行性和正确性,为PWM整流器的实现提供了一种新的思路。
[1] Singh B,Singh B N,Chandra A,et a1.A review of three-phase improved power quality AC-DC converters[J].IEEE Transaction on Industrial ElectroniCS,2004,51(3):641-660.
[2] 王恩德, 黄声华. 三相电压型PWM整流的新型双闭环控制策略[J]. 中国电机工程学报, 2012, (15):24-30.
[3] 张崇巍,张兴.PWM整流器及其控制[M].北京:机械工业出版社,2005.
[4] 冒建亮, 叶桦, 张舒哲. 基于FPGA的变频控制系统的实现[J]. 东南大学学报(自然科学版). 2012,(S1):25-30.
[5] 胡开埂,杨贵杰. 基于DSP的三相PWM可控整流系统的设计[J]. 电气应用, 2007,(10):51-54.
[6] Pican E, Omerdic E, Toal D, et al. Direct interconnectionof offshore electricity generators[J]. Energy, 2011, 36(3):1543-1553.
[7] 黄晓燕, 冯西安, 高天德. 基于CompactRIO 的多通道阵列数据采集系统实现[J]. 测控技术, 2009, 28(12):17-19.
[8] 陈树学,刘萱. LabVIEW宝典[M]. 北京:电子工业出版社,2011.
Design of Three-phase Two-level PWM Rectifier Controller Based on CompactRIO
Xu Peng1, Zeng Qifan1, Xiang Dong1, Meng Guangwei1, Jiang Xiao2
(1. Naval University of Engineering, Wuhan 430033, China; 2. No.92724 Unit of PLA, Qingdao 266109, Shandong, China)
TM461
A
1003-4862(2015)01-0009-04
2014-07-08
徐朋(1984-),男,硕士。研究方向:电力电子与电力传动。