基于Solidworks的组合机构运动仿真与分析
2015-10-10白艳
白艳
(风神轮胎股份有限公司,河南 焦作 454003)
基于Solidworks的组合机构运动仿真与分析
白艳
(风神轮胎股份有限公司,河南 焦作 454003)
利用Solidworks对齿轮凸轮机构和齿轮连杆机构进行运动仿真,研究其运动规律;通过仿真模拟得到了位移、速度和加速度的运动曲线;最后针对上述两种组合机构的运动曲线进行了对比分析研究。研究结果为掌握组合机构的组成原理、运动性能和动力性能提供了理论依据;增强了机构设计的直观形象性,并且可以为机构的优化设计做好铺垫。
运动仿真;机构;Solidworks
现代化机械产品和机械设备朝着高精度、高负载及自动化的方向发展,单一的机构远远不能满足我们的实际生产需要,越来越多的组合机构出现在现代机械产品中,日本利用齿轮连杆组合机构已设计出了多款机器人,向自动化迈出了一大步;美国利用齿轮连杆机构已设计出了月球探测器和着陆器,因此组合机构的运用成了现代工业发展的趋势。
对于机构的设计传统方法多采用轨迹图法或根据几何约束条件建立方程组进行求解。但对于三个以上的组合机构,其运动的多样性及轨迹的复杂性使得轨迹法和计算法显得非常复杂,并且很难保证求解的准确性。SolidWorks三维绘图软件是集设计与运动一体的软件,通过三维建模并进行运动仿真,能够很好的得到机构运动曲线,并缩短产品开发的时间,同时也能为后续机构的优化设计打下基础。
1 齿轮凸轮机构运动仿真
齿轮凸轮机构由齿轮机构和凸轮活塞机构组成,其工作原理图如图1所示。A为小齿轮,B为大齿轮,C为凸轮机构,D为活塞机构。当马达带动小齿轮运转时,小齿轮带动大齿轮运动,其结构起到了一个减速的作用,大齿轮带动凸轮机构运动,凸轮机构通过其轮廓曲线带动推杆机构作上下平动,推杆机构链接着活塞机构,使活塞机构作往复运动。由于凸轮机构的轮廓曲线较复杂,不易得到预期的运动规律[1]。因此在本设计将凸轮与连杆机构进行对比,以观察两种机构的运动特点。从而研究连杆机构在本设计中的相对凸轮机构的优点。
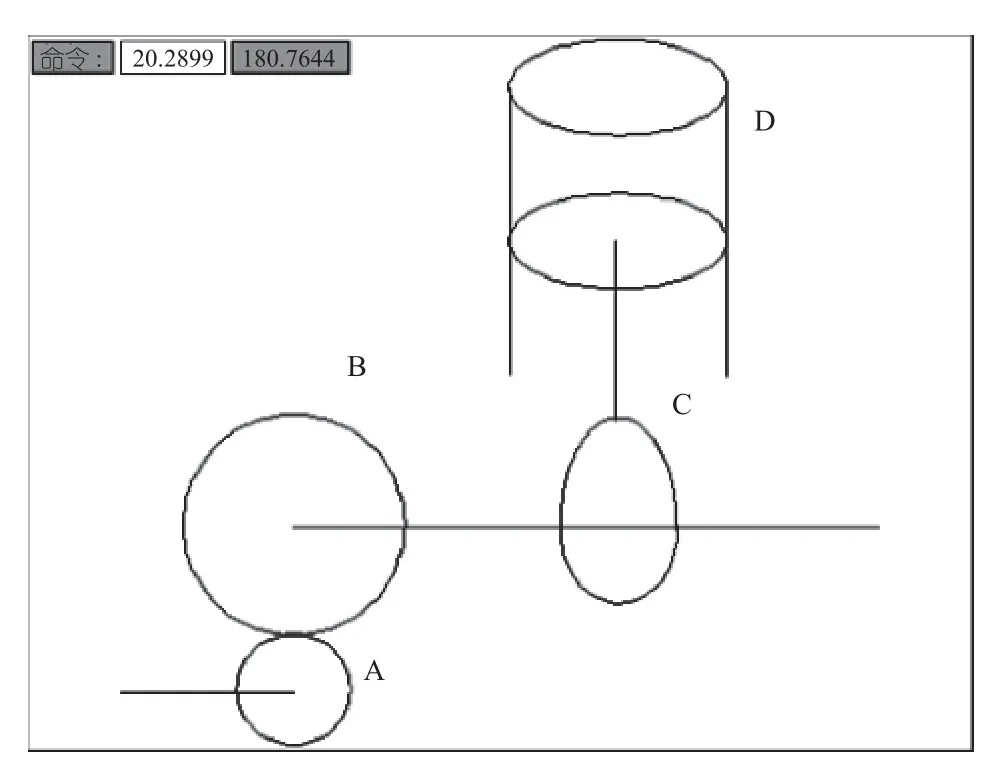
图1 齿轮凸轮机构的运动简图
小齿轮分度圆D1=40 mm;大齿轮分度圆D2= 60 mm。连接齿轮与凸轮的连杆如图1所示;凸轮的基圆半径r0=25 mm,;凸轮的运动带动推杆作上下平动,推杆连接着活塞,活塞的活动盘直径d1=40 mm;推杆的长度L=60 mm;将各零件图装配得到齿轮凸轮机构的装配图如图2所示。最后进行动画仿真,在装配的过程中注意小齿轮与大齿轮的啮合、凸轮与推杆机构的啮合,要限制其自由度,因此连接处要用到键或用六角连杆,为了便于设计与绘画,此装配采用六角连杆[2]。
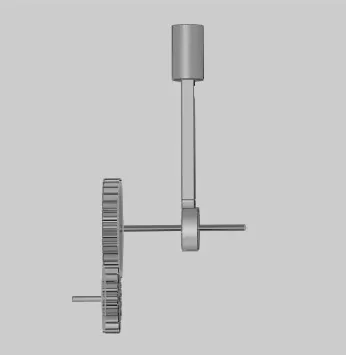
图2 齿轮凸轮机构的装配图
给小齿轮添加旋转马达提供其运动,当小齿轮在马达的驱动运动时,小齿轮将动力传给大齿轮,由于刚开始不需要活塞的往复运动较快,所以这里起到了一个减速的作用。我们设置小齿轮的转速为10 r/min,仿真时间5 s,进行仿真[3]。仿真结果的位移、速度、加速度图如图3、图4、图5所示。
2 齿轮凸轮机构运动仿真结果分析
根据位移图所知,凸轮推杆的位移是随着运动使推杆先向上运动到最高点,此过程为推程;由于凸轮有一个以轴心为圆的圆弧,所以推杆有一段时间处于最高位置而静止不动,即为远休止;经过远休止后,推杆又随着不规则的圆弧运动回到起始点,这个过程为回程;凸轮继续运动时,推杆又重复上述过程。凸轮机构按照某规定的运动曲线运动,其凸轮轮廓的设计与制造较困难,因此本文利用齿轮连杆机构来代替齿轮凸轮机构。
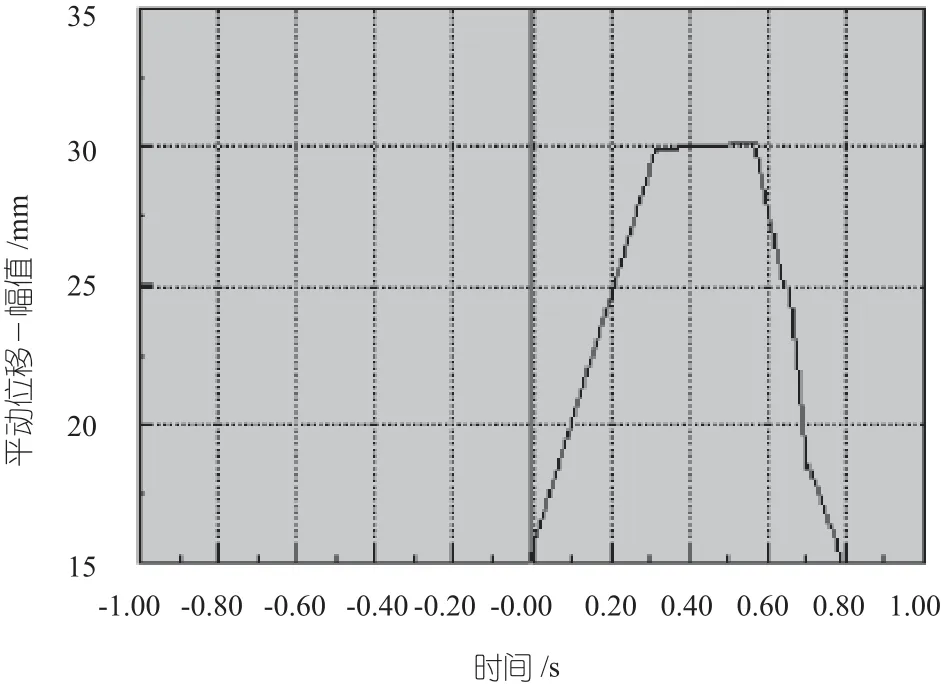
图3 齿轮凸轮推杆的位移图
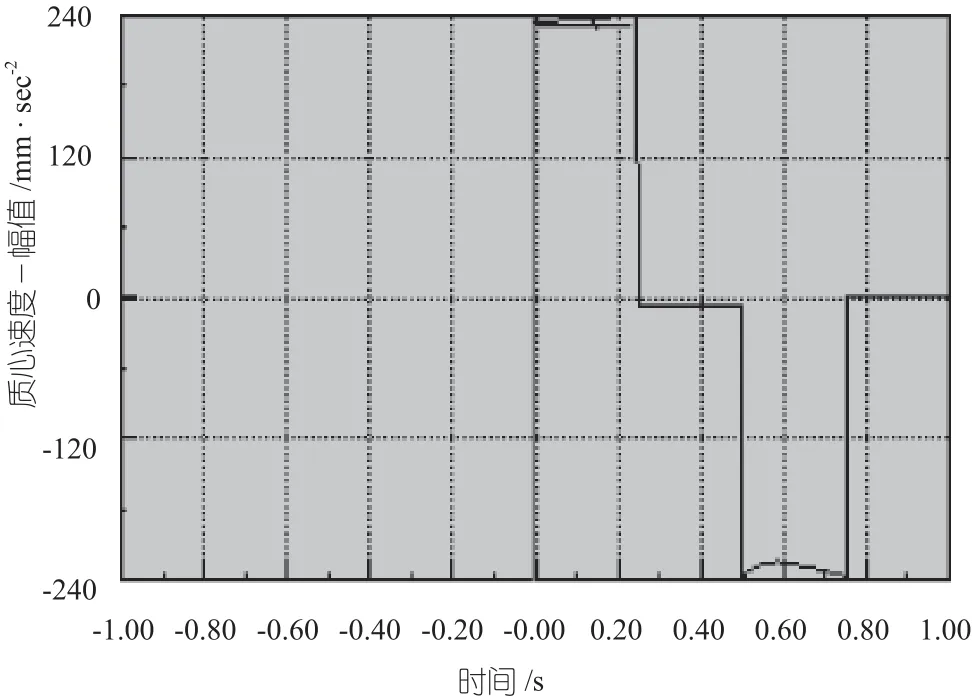
图4 齿轮凸轮推杆的位移图
图5 齿轮凸轮推杆的位移图
根据凸轮推杆的运动速度图可知,推杆在凸轮运动过程中先是加速运动到最大速度,保持最大速度运动一段时间,然后减速至零;凸轮继续运动,推杆作回程运动,此时推杆的速度再次变大,方向发生变化。由于此时的凸轮并不规则所以推杆的速度最高点取决于不规则曲面的长度,当到达速度最高点时,推杆作减速运动直到回到运动起始点,此时速度为零。
根据推杆的加速度图可知,刚开始为无穷大;推杆匀速上升过程,加速度为零;推杆速度为零时,加速度也为零;推杆反向运动,加速度增大;当速度达到反向最大时,加速度为零。
3 总结
研究结果表明,利用Solidworks可以得到准确得到机构运动特性;可以直观的得到机构在任意时间运动的数值;同时通过仿真动画,可以真实的观察到机构运动的全过程,并且得到的运动参数与理论知识计算所得结果相吻合,为机构设计提供了有效真实的理论依据,同时也为后续的机构优化设计提供了实验数据。
[1] 孙桓,陈作模.机械原理[M].6版.北京:高等教育出版社,2001.
[2] 詹迪维. Solidworks快速入门教程(2012中文版)[M].北京:机械工业出版社,2011.
[3] 刘静.挖掘机器人虚拟样机建模策略与仿真技术研究[J]. 浙江大学学报(工学版),2004(11):1.
(P-05)
Solidworks based motion simulation and analysis for combinations
TQ330.4
1009-797X(2015)22-0154-03
B DOI:10.13520/j.cnki.rpte.2015.22.062
白艳(1976-),女,工程师,毕业于河南理工大学电力系统及其自动化专业,风神轮胎股份有限公司,主要从事信息化建设和管理工作。
2015-09-17