基于模糊控制的电动助力转向系统控制策略研究
2015-10-09梁志宏
梁志宏


摘 要:随着现代汽车电子控制技术的飞速发展,电动助力转向(ElectricPowerSteering,简称EPS)系统正逐步取代传统液压助力转向系统。该文通过对汽车电动助力转向系统的动力学分析,建立了车辆了EPS系统的动力学模型,提出了基于模糊控制的EPS系统助力控制策略,并对其建模仿真,为电动助力转向系统的设计与开发提供理论基础和设计方法。
关键词:电动助力转向 助力特性 模糊控制
中图分类号:U463.4 文献标识码:A 文章编号:1672-3791(2015)06(c)-0118-02
电动助力转向系统是集合安全、环保和节能为一体的助力转向技术,它的助力特性属全车速感应型,通过对EPS控制器进行软件的编程设定,能够方便地对系统的助力特性进行调节,使汽车可以在不同工况下获得相应的助力特性,从而提高驾驶员在转向时的路感和手感。与传统的液压助力转向系统相比,电动助力转向系统的助力机构由复杂的液压机构变成了依靠电动机产生助力的系统,系统通过控制助力电动机电流的方向和幅值,实现为转向器提供助力扭矩的要求,提高了汽车在低速行驶时转向操纵的轻便性;同时又保证了汽车在高速行驶时稳定的转向手感,从而提高高速行驶时的操纵稳定性。由于取消了液压泵、储液罐、液压管路等液压系统,电动助力转向系统比液压助力转向系统更容易进行装配和检测,能耗低,也更环保。[1-4]在汽车产品环保、低能耗和智能化的大方向下,目前国外多家大型公司的EPS产品已经成功装配于微、轻型轿车,国内对EPS的研究已经取得了一定的成果,但与国际先进水平依然存在一定的差距。着眼于未来的汽车转向系统巨大的潜力,开发EPS系统,尤其制定性能可靠的EPS控制策略对于提高我国汽车行业的竞争力具有一定的现实意义。
1 电动助力转向系统结构原理
1.1 电动助力转向系统结构
电动助力转向系统主要由装在转向器输入端的转向(转矩)传感器、机械式转向器、车速传感器、电子控制单元(ECU)、电动机、减速器和电源等组成。[4,5]ECU根据作用在转向盘上的转向转矩信号以及车速信号、发动机转速信号等,决定EPS系统是否投入工作。当转向盘转动时,经过对其转矩信号的采集、判断和处理后,根据ECU存储器中制定的助力特性,控制电动机的旋转方向和作用在电动机上的助力转矩电流的大小及作用时间。通过减速器将辅助动力施加到转向系统中,从而完成助力转向的实时控制。低速行驶时助力作用大,转向轻便;高速行驶时减小助力,以提高路感和操纵稳定性。
1.2 电动助力转向系统的控制策略
EPS系统的主要功能给助力电动机提供一个合适的驱动力、保持良好的转向路感,同时确保转向响应速度、抑制来自转向系统内部的振动和路面不平造成的振动和冲击。EPS系统控制策略主要包括转向助力控制、回正控制和阻尼控制等。而转向助力控制是其基本的控制策略。在汽车转向过程中,ECU根据驾驶员作用在转向盘上的输入转矩和当前车速信息,由存储在ECU中的助力特性决定应提供多大的助力电流给电动机,从而得到与不同行驶工况相适应的转向助力。图1所示为EPS系统的助力控制过程框图,ECU根据转向盘转矩传感器检测到的转矩信号和车速传感器检测到的车速信号V,由转向助力特性确定电动机的目标电流,之后由电流控制器控制电动机的电流,使电动机输出目标助力矩Tm。
EPS的助力特性由嵌入其ECU中的程序设置,可以输出任意形状的助力特性曲线,且调节方便。该文采用如图2所示的一种折线型的助力特性曲线,该特性曲线由直线行驶区I、强路感区II和轻便转向区Ⅲ等三个助力区域组成。在无转向或转向角非常小的中心区域对应助力曲线采用直线行驶区I;轻便转向区则是对应转向角较大的区域;强路感区介于二者之间。
折线型助力特性曲线可用以下函数表示,式中,、分别为助力特性曲线的梯度,其具体数值随车速的增加而减小,Td为转向盘输入力矩。该助力曲线的特点是转向助力与转向盘力矩成分段线性关系,易于编程实现。
(1)
2 基于模糊控制的转向助力控制
2.1 电动助力转向系统数学模型
电动助力转向系统的数学模型由转向机构机械模型、电动机模型、ECU控制算法模型等模块组成,[8,9]根据EPS系统各模块间的联系建立系统仿真模型如图3所示。输入为系统给定信号即转向盘转矩和反馈信号即电动机的电流I,输出为作用到转向轴下端的转角degree和助力力矩。
2.2 模糊规则的建立
模糊集合理论(FuzzySetTheory)1965年由Zadeh教授提出,模糊控制是基于“专家知识或操作经验,采用语言规则表示的一种人工智能控制策略。[8,9]电动机助力电流的控制决策所采用的是一个双输入单输出的模糊控制器。输入量分别为转向盘转矩和车速V,输出量是电动机的助力电流。该文设的论域为[1,10],单位是N·m,V的论域为[0,120],单位是km/h。设的论域为[0,28],单位是A。制定好控制规则,建立转向助力电流决策的模糊控制器后,可以得到该系统助力特性三维图,如图4所示。从图中可以清晰地看到不同车速、转向盘输入转矩下对应的助力电机转向助力电流值。
3 系统仿真运行结果
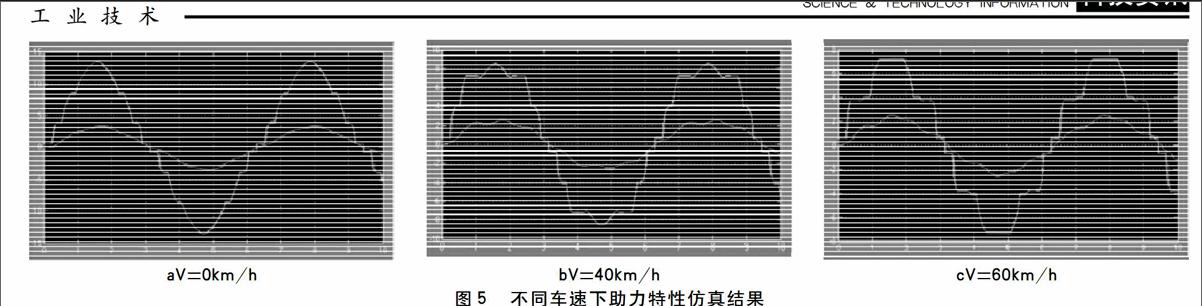
图5中分别为车速在00km/h、40km/h及60km/h下的转向助力特性曲线,曲线表明该文制定的助力控制策略是符合实际EPS系统在行驶过程中对转向助力的要求的。通过该控制策略能得到与不同工况相匹配的转向助力电流值。
4 结语
该文通过分析EPS系统的关键技术和工作原理对电动机特性参数与EPS系统的匹配进行了讨论,完成了EPS系统各部件的选型及数学模型的建立。设计了一种基于模糊控制的EPS系统转向助力控制策略,并在simulink中进行了仿真,得到了在不同车速和转向盘转矩输入下的转型助力特性曲线,该控制器对助力电机的电流具备较高的响应速度,所制定的转向助力控制策略和控制方法基本可以满足实际EPS系统的要求。
参考文献
[1] 陈家瑞,马天飞,蒋兴阁等.汽车构造(第五版)[M].北京:人民交通出版社,2005.
[2] 齐军国.汽车电动助力转向系统的设计与实现的研究[D].上海:上海交通大学,2005.
[3] 刘惟信.汽车设计[M].北京:清华大学出版社,2001.
[4] 郭孔辉.汽车操纵动力学[M].长春:吉林科学技术出版社,199l.
[5] 叶耿,杨家军,刘照,等.汽车电动式动力转向系统转向路感研究[J].华中科技大学学报,2002,30(2):24-26.
[6] 陈奎元,马小平,季学武.电动助力转向系统控制技术的研究[J].江苏大学学报,2004,25(1):21-24.
[7] Thomas D.Gillespie(赵六齐,金达锋.译).车辆动力学基础[M].北京:清华大学出版社,2006.
[8] 曾光齐,胡均安,王东,等.模糊控制理论与工程应用[M].武汉:华中科技大学出版社,2006.
[9] 李书龙,许超.电动助力转向系统中的模糊控制[J].公路交通科技,2004,21(4):l01-103,108.
