ADS—B对于TCAS性能影响的技术研究
2015-10-09孟繁栋胡应东
孟繁栋++胡应东

摘 要:随着航空业在我国的迅猛发展,空中交通的密度越来越大,空域安全的问题越来越突出,交通告警和防撞系统(TCAS)由于可以为机组提供决断咨询(RA)而提高了航空运营的安全性水平。TCAS使用二次雷达数据,因此理论上来讲广播式自动相关监视(ADS-B)可以通过提供更精确的位置数据来提高TCAS的性能。该文分析了ADS-B对于改善TCAS性能的可行性,同时对所述方案进行了仿真研究,结果表明ADS-B对于改善TCAS性能具有优化作用,可为后续TCAS性能优化工作提供支持。
关键词:交通告警和防撞系统 广播式自动相关监视 性能影响 仿真分析
中图分类号:V355 文献标识码:A 文章编号:1672-3791(2015)06(c)-0041-02
安全是航空工业的生命,尽管现代空中交通管理已经显著提高了航空工业的安全水平,然而空中冲突的风险仍然存在并需要全面关注和解决。随着空中流量的显著增加,美国民航局(FAA)预测未来20年内空中冲突的风险将增加300%,该预测是推动防撞系统发展的主要动力。
在1993年之前,民航飞机上没有机载设备用于指引飞行员避免潜在的空中冲突事件。在一系列空中冲突发生,尤其是1978年圣地亚哥空难发生之后,FAA开始强烈关注TCAS的发展。总的来说,TCAS用于辅助飞行员在正常的空中管理程序失效之后仍可维持充足空中安全间隔的机载设备。在TCAS之前,飞行员依靠管制员来提醒附近可能存在冲突飞机的风险,而管制员依靠地面二次雷达接收应答机提供的位置、高度信息来管理交通。这种方式的巨大问题是在二次雷达无法覆盖的区域,管制员无法获得有效的信息。这种情况下,为飞行员提供独立有效的方法以维持充足的空中间隔显得至关重要,这种实际的需求直接促进了TCAS的发展。
1 TCAS和ADS-B简介
1.1 交通告警和防撞系统(TCAS)
目前,TCAS是独立运行的交通防撞和告警系统[1],它为装备了应答机以及TCAS的飞机提供空中防撞的保护。TCAS主动询问周围装备了应答机的飞机并跟踪收到的应答信息,通过应答信息判断附近飞机的方位和高度,如果TCAS运算法则确定飞机即将入侵,TCAS将发出交通咨询信息(TA),如果入侵飞机继续接近,TCAS将发出决断咨询信息(RA)。TCAS提供的保护等级由对方飞机所带应答机的类型来确定,如果入侵飞机没有报告高度(模式A),TCAS仅发出交通警告信息,如果入侵飞机报告了高度(模式C或S),TCAS将发出交通咨询和决断咨询。如果入侵飞机也装备了TCAS,那么这两个TCAS将通过S模式应答交换信息对冲突进行协调解决,并为飞行员提供机动指令。
1.2 广播式自动相关监视(ADS-B)
广播式自动相关监视(ADS-B),是一种基于飞机的监视系统[2],它将飞机安装的全球定位系统提供的经度、纬度、时间和大气数据系统提供的高度以及应答机提供的识别信息等数据以广播的方式向外发送,提供给周围的飞机和地面用户接收和显示。这种监视系统可以减小地面二次雷达无法覆盖区域的限制,增强机场的场面监视能力,进而可以提高飞行安全。
ADS-B系统包括多个地面站和机载站,以网状、多点对多点的方式完成无线电视距范围内的双向数据通信。ADS-B不仅可以实现地面空管对飞机的监视,也可以实现飞机与飞机之间的自动相关监视,这使得飞行员在防止空中交通冲突方面的能力大大增强,中国民航总局已发布了ADS-B管制运行的规程[3],已促进ADS-B在我国的应用。
在ADS-B系统的实际运行中,可以分为ADS-B IN和ADS-B OUT两种工作方式,该文中仅讨论ADS-B OUT的方式。
2 TCAS性能影响模型
2.1 TCAS性能的影响因素
实际的TCAS软件是非常复杂的,在TCAS软件开发之前必须通过严格的安全法则的确认,该文的研究中参考霍尼韦尔2011年发布的升级版TCAS[4]以及FAA发布了TCAS II手册[5](7.0版),对其性能进行简化建模,如图1所示。模型输出的为飞机机动的安全间隔和所需时间,影响输出的主要因素包括飞行员反映模型、飞机气动模型和TCAS外部输入的数据误差模型。
2.2 影响因素分析
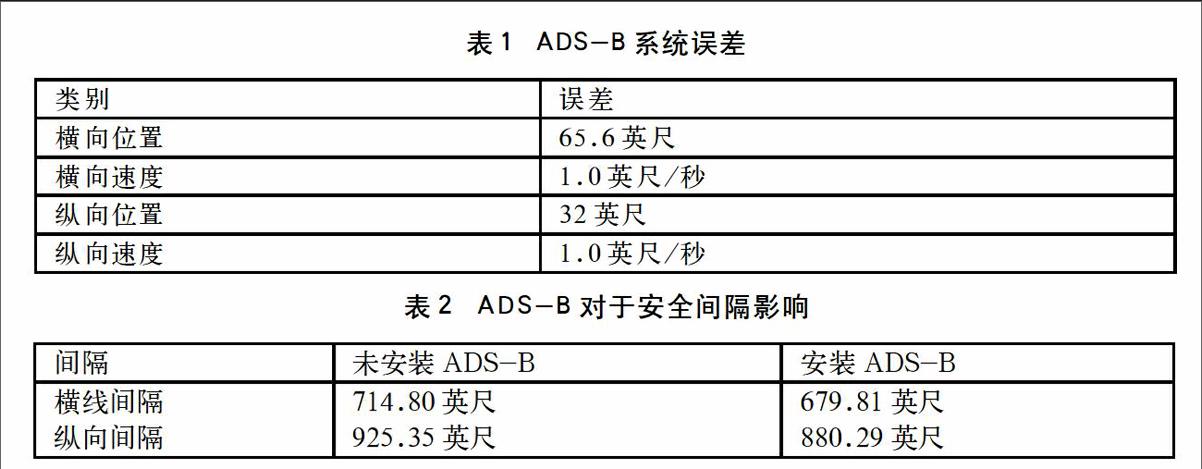
飞行员反映模型是指在TCAS系统给出交通资讯(TA)或决断咨询(RA)之后,飞行员做出反映的时间,一般假定为5s,考虑到出现TA后飞行员一般不做出操作,仅在RA出现后操纵飞机机动,本文中使用时间为9s[6]。飞机气动模型是指飞行员在操纵飞机执行决断咨询机动指令时飞机的气动特性,该文中以高平尾下单翼民航客机为对象,其运动方程参见文献7。TCAS外部输入的数据误差模型包含数据处理误差和设备误差。其中数据处理误差可以忽略,设备误差来自于入侵飞机位置的估计误差,对于目前使用的多数TCAS系统来说,其使用的二次雷达数据误差在4°至5°以内,对于安装了ADS-B的系统来说,其位置误差如表1所示。
3 系统仿真研究与性能分析
3.1 仿真条件设定
仿真中假定载机处于连续下降起始阶段,载机高度20000ft-40000ft,入侵飞机高度22000ft-42000ft,两机航向偏差分别为45、90和135,并且假定入侵飞机仅安装应答机,未安装TCAS一直保持平飞状态,以便考察载机TCAS的性能。出于保守和安全的角度考虑,假定TCAS给飞行员的纵向机动指令最大为1500ft/min。
3.2 仿真结果与分析
整个仿真以不同高度共进行5次,安装与未安装ADS-B的情况下,TCAS引导飞行员机动至安全间隔的时间差如图2所示,对于安全间隔大小的影响如表2所示。
从图2可以看出,在不同高度和航向偏差的情况下,ADS-B的安装对于TCAS引导飞行员机动至安全间隔的时间的影响非常小,几乎可以忽略,可以看出影响机动时间的主要因素是飞行员反应时间和飞机气动特性。但是从表2中可以看出,安装ADS-B之后对于安全间隔存在一定的改善作用,这主要是由于相对于使用传统应答机确定方位和距离的TCAS来说,ADS-B提高了位置数据的精度,可以使空管系统可以更加准备的确定飞机之间的间隔。
4 结语
交通告警与防撞系统已成为运输类民航客机飞行中不可缺少的重要组成部分,其可以在空中交通管制程序失效的情况下,独立的为飞行员提供安全间隔的告警和机动指令,是飞机安全运行的可靠保障,因此对于交通告警和防撞系统性能的改善具有重要的应用价值。该文开展了ADS-B对于TCAS性能影响的仿真研究工作,结果表明ADS-B对于改善TCAS性能,在保证安全的前提减小飞机之间的间隔,增加空中交通的密度存在一定作用。
参考文献
[1] 何桂萍,徐亚军.基于TCAS II和ADS-B的组合监视防撞系统研究[J].电光与控制,2011(4):61-64.
[2] 刘国峰.简述ADS-BIN技术在中国的应用前景[J].电脑知识与技术,2012(3):704-706.
[3] 中国民用航空空中交通管理局.关于下发《广播式自动相关监视(ADS-B)管制运行规程》的通知[S].2011.
[4] 尚金龙,吴勇.飞机电子系统中避撞设备的发展和技术探讨[J].科技创新导报,2012(21):33-36.
[5] U.S. Department of Transportation Federal Aviation Administration. Introduction to TCAS II Version 7.0[S]. 2000.
[6] ACAS Program.ACAS Safety Study: Safety Benefit of ACAS II Phase 1 and Phase II in the New European Airspace Environment,2002.
[7] Anderson,J.D.Aircraft Performance and Design[J].McGraw-Hill International Edition,Singapore,1999.
