可垂直起降的高速飞行航模无人机的研究
2015-09-25柯帅
柯帅
摘 要:航模是一种用于航空知识普及、理论研究、机型试验、军事侦查、摄影辅助等领域的不载人模型飞机,目前常见的有航模直升机和航模飞翼两种类型,但它们都具有难以同时实现垂直起降和快速飞行两种功能的弊端。本研究设计了一种螺旋桨可旋转式航模无人机,可以通过伺服舵机来调整螺旋的桨角度,进而控制飞行姿态,当起降时螺旋桨轴线调整到竖直方向,当快速飞行时螺旋桨轴线调整到水平方向。此外,为了增加飞行时间,航模搭载了一套太阳能充电系统,通过安装在机翼上的太阳能电池板将光能转换成电能,经过稳压电路、充电电路的处理,输出端可以直接为锂电池充电。以上几项关键技术问题的解决,为航模无人机在更多领域的广泛应用提供了有效的技术保障。
关键词:航模 垂直起降 高速 太阳能
中图分类号:V249 文献标识码:A 文章编号:1674-098X(2015)07(b)-0007-02
航模是指能够在空中飞行的模型飞机,一般用于航空知识普及、理论研究、机型试验、军事侦查、摄影辅助等领域。目前常见的航模主要有航模直升机和航模飞翼两种类型,由于两者结构布局上的较大差异,所以具有不同的特点[1-2]。其中航模直升机安装一个螺旋桨和一个尾桨(又称抗扭螺旋桨),主要依靠螺旋桨的旋转产生升力和前进的推力,尾桨用于平衡姿态,所以通常螺旋桨的尺寸较大、结构相对复杂,提供的升力也有限,只能以低速飞行,另外单螺旋桨抗风能力差,飞行不稳定,易失衡造成失控或坠机。航模飞翼又称全翼机,采用一种有别于常规方式的气动布局形式,没有尾翼,并且机身的主要部分全都隐藏在机翼内,简单说就是只有飞机翅膀的布局形式,机身和机翼融为一体,外观呈扁平状,这种气动布局方式的好处在于飞行时只需提供前进的推力,机身依靠自身结构特点产生向上的升力,不足在于需要高速飞行才能产生足够的升力,滑行起降过程对场地要求较高。
另外,现有航模飞机多采用锂电池供电,由于受电池容量和充放电效率的限制,航模的飞行时间和飞行距离有限,飞行一段时间后就需要降落更换电池或重新充电,大大降低了飞行效率。
1 航模本体机构设计
针对现有航模无人机技术存在的垂直起降和快速飞行[3]两种功能无法兼顾的问题,本文提出了一种全新的设计方法,利用可以旋转的螺旋桨实现航模的垂直起降和快速飞行两种功能,同时在机翼上安装太阳能电池板,对锂电池进行充电,大大增加了航模的可持续飞行时间。
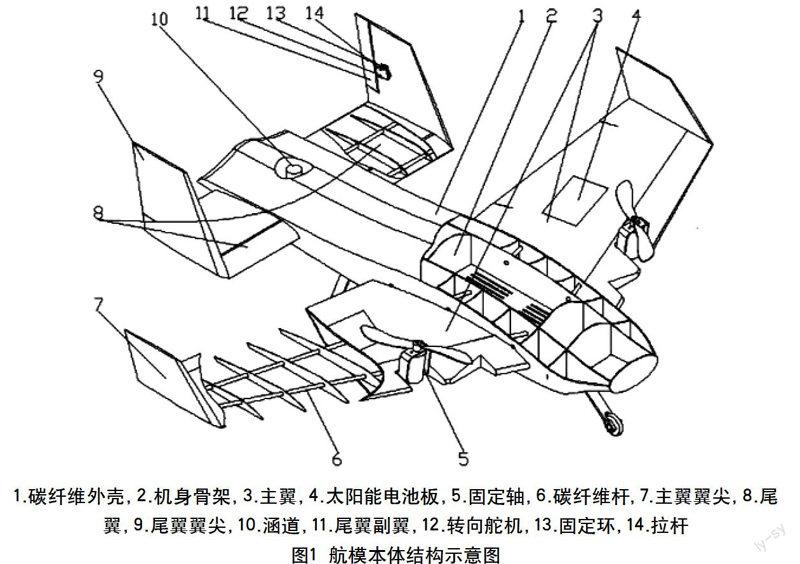
为了解决以上所提出的技术问题,本文在设计过程中采用以下技术方案:垂直起降航模无人机本体包括机身、机翼、升降及飞行系统和转向机构,整机翼展2m,整体质量3.5kg,其结构如图1所示。
为了减轻重量、提高强度,机身和机翼采用轻木薄板和碳纤维杆作为骨架,骨架外部包裹一层碳纤维外壳,既能提高机身强度,又能降低飞行阻力,机身骨架内部有用于安装其他控制部件的机舱[4]。机翼包括主翼、主翼副翼、尾翼和尾翼副翼,主翼和尾翼可以通过特有的空气动力学设计为飞机提供飞行升力,主翼副翼和尾翼副翼安装在主翼和尾翼末端,可以在转向系统的作用下,绕机翼小角度摆动,来调整飞机的飞行姿态。升降及飞行系统包括两个可旋转的螺旋桨和一个风扇式涵道,螺旋桨可以通过旋转舵机来调整姿态,当航模在完成起降动作时,将螺旋桨轴线调整到竖直方向,就可以实现垂直起降,而在飞行过程中,只需要将螺旋桨轴线调整到水平方向,就可以快速飞行,调整过程在飞行时就可以完成。固定安装在机体尾部的涵道,其功能是在起降时与螺旋桨配合维持机身的平稳。
2 控制系统研究
2.1 硬件组成
航模的硬件系统主要包括电动机、微型伺服舵机、电子调速器和飞行控制模块[5]。其中电动机采用高转速无刷电机,电阻低,高能效,最大功率可达300W,额定转速达3000转/min,同时电机配有12-8APC尼龙两叶折叠螺旋桨,产生的净推力为15N。整机配有4个数字舵机,采用银燕90508式数字舵机,它们分别控制主翼副翼和尾翼副翼,该型号电机质量小,能耗低,响应迅速,最大工作电流仅为0.5A,最大输出拉力为8N。电子调速器用于调节电机的输入电流,当输入一个控制信号给电子调速器时,电子调速器中的放大器会通过“增益控制单元”和“复位单元”把控制信号变成输出电流的大小,输出电流大小直接决定着无刷电动机和伺服舵机的转速、转矩,进一步控制飞机的飞行姿态,电子调速器采用最大输出电流为40A的型号,额定工作电压为7.4~14.8V,最大输出功率550W。
飞行控制系统是整个航模硬件部分的核心,通过它可以控制航模的飞行姿态和飞行轨迹,具有遥控操作和自主运行两种控制模式[6]。系统发出指示信号给电子调速器,进而控制电动机、舵机的输出转速和转矩,同时系统也可以接收传感器反馈的信号,根据反馈信息对飞行姿态进行微调。飞行控制系统由三轴陀螺仪、三轴加速度计和一个ARM处理器组成,在飞行过程中可以对航线进行校准,静态角度分辨能够达到0.1°,而且具有内置保护程序,确保整个系统具有故障自检功能,对航线进行记忆,在失控条件下能够自主返航。
2.2 无线传输模块
无线传输模块安装在机体内部,通过一根高频天线与地面基站进行通讯,传输系统分为无线数据传输和无线图像传输。数据传输通道采用频率为433MHz的收发一体电台,该数传电台工作电压5~7.4V,最大功率为0.25W,地面传输距离大于1.5km,地空传输距离大于10km。无线图像传输采用2.4G发射电台,工作电压3.3~5.5V,最大发射功率0.5W,可同时传输音频和视频。
3 太阳能充电系统
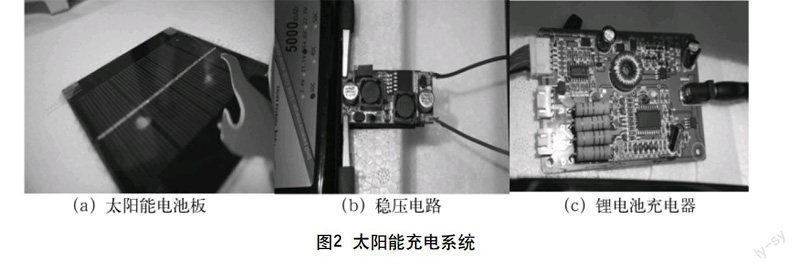
由于机身翼展达到2m左右,尺寸较大,电池电量消耗快,电池满电量情况下飞行时间在30min左右,为了增加续航时间,利用太阳能充电系统为锂电池进行充电,该系统包括太阳能电池板、稳压电路和锂电池充电器[7],如图2所示。太阳能电池板安装在主翼上表面,利于最大程度吸收光照,输出端由主翼内部进入机身与稳压电路、充电电路相连,最终为锂电池充电。
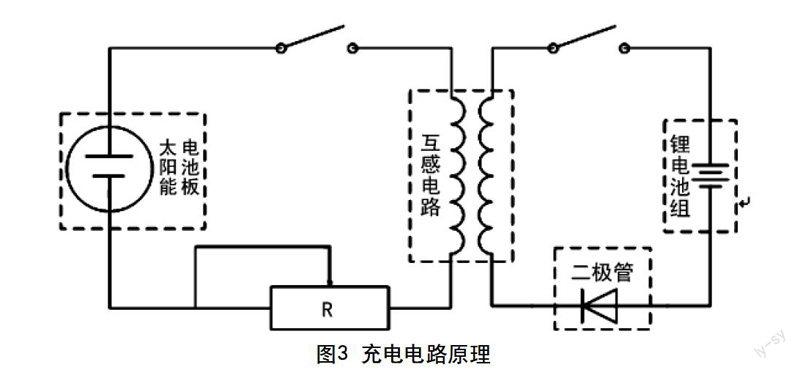
太阳能板采用的是4块9V的单晶硅电池板,与锂电池串联在一起形成闭合回路,当光照强度在5×104kV以上时,输出电压在30V左右,由于太阳能电池板直接输出的电压是不稳定的,需要经过稳压电路进行稳压,稳压电路有效输入电压在3~36V之间,而输出电压值根据锂电池充电电压要求进行设置,实际输出为16.8V,可以直接为锂电池实时充电。此外,在稳压器与锂电池之间串联一个单向导通二极管,避免在光照不足时,锂电池两端电压大于充电电压,形成反向导通回路放电,充电电路如图3所示。
4 结语
本研究设计的具有垂直起降和高速飞行两种功能的航模无人机,可以通过控制螺旋桨的姿态来实现不同功能,有效解决了传统航模机型两者不能兼顾的弊端,大大提高了航模无人机的飞行适应能力。另外,太阳能充电系统可以在飞行过程中为锂电池进行充电,通过稳压电路、充电电路将太阳能电池板输出的不稳定电压转换为恒压输出,直接为锂电池进行充电。
由于实现了垂直起降和快速飞行两种功能,同时太阳能充电系统又可以提高航行时间,这些关键技术为航模无人机在更多领域的广泛应用提供了技术保障。通过搭载有效的巡检设备,比如云台摄像机、红外热像仪和激光扫描仪等,航模的功能将不仅仅局限在飞行任务上,可以实现更多的功能。
参考文献
[1]李磊.无人机技术现状与发展趋势[J].硅谷,2011(1):46.
[2]刘鹏,彭艳鹏,邹秀琼.我国无人机航摄系统现状和前景[J].地理空间信息,2010,8(4):4-7.
[3]周宏霞,刘斌,吕锁宁.飞翼布局飞行器结构特性分析[J].固体火箭技术,2014(3).
[4]李小勇,张淼等.翼身融合飞机的空气动力学研究进展[J].飞机设计,2007,27(2).
[5]李一波,李振,张晓东.无人机飞行控制方法研究现状与发展[J].飞行力学,2010,29(2):1-9.
[6]陈远炫,裴海龙,陈勇.小型无人机飞行控制系统的硬件设计与实现[J].计算机工程与设计,2010(10).
[7]赵雅芸.一种太阳能充电控制器的设计[J].长江大学学报(自然版),2013(9).
