基于ZigBee的矿井无线定位系统设计
2015-09-22曾妍胡钢曾宝国程远东杨波占海涛
曾妍+胡钢+曾宝国+程远东+杨波+占海涛
摘 要:针对矿井人员和机车精确定位需求,提出了基于ZigBee的定位系统设计方案,分析了利用RSSI/TOF算法测距和双基站协同定位的实现原理。经工程应用测试,该系统能在较远距离范围内实现高精度实时定位。
关键词:矿井定位系统;RSSI/TOF测距;协同定位;高精度实时定位
中图分类号:TN393.17 文献标识码:A 文章编号:2095-1302(2015)09-00-03
0 引 言
建设可靠的矿井定位系统,提高对人员和机车的动态跟踪管理,增强事故应急快速反应能力,对保障煤矿安全生产具有重要意义,相关要求已被列入国家《煤矿井下安全避险“六大系统”建设完善基本规范》。为构建适用于煤矿井下的无线定位系统,文献[1]提出了一种基于邻近信号强度(NSSS)指纹匹配和动态三边测量(DTN)算法的精确测距定位方法,并通过仿真表明其在10 m以内的范围具有高精度实时定位能力;文献[2]提出了一种基于ToF的测距定位算法,并通过实验测试表明其在10~100 m的范围内具有精度高达±2 m的定位能力。四川信息职业技术学院会同四川维诚信息技术有限公司、深圳哲扬科技有限公司,在充分吸收上述研究成果的基础上,提出了基于ZigBee和工业以太网的定位系统设计方案,通过RSSI/TOF(Received Signal Strength Indicator/Time of Flight)融合测距和双基站协同定位算法实现了在较远距离范围内的高精度实时定位。
1 系统组成
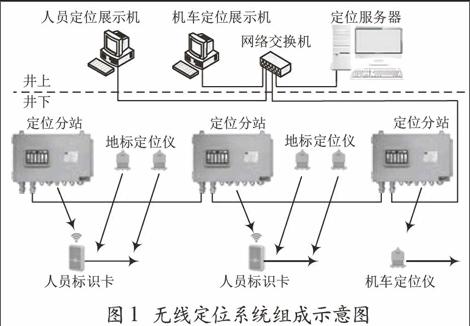
综合考虑煤矿井下作业环境和要求,本系统所要实现的主要功能包括:(1)实时监测功能,即能分区域实时监测井下人员和机车的精确分布情况,并在井下巷道图上实时动态地显示行踪;(2)查找人员及机车当前位置功能,即输入任意人员或机车的编号,可立即以图形方式显示其当前精确位置。按此功能,将本系统分为井上和井下两部分,系统组成如图1所示[3]。其中,井上部分包括网络交换机、定位服务器、定位展示机;井下部分包括定位分站(基站)、地标定位仪、人员标识卡、机车定位仪。定位分站用于获取人员和机车标识位置信号,并将随同综合分站的编号发送给井上处理器。地标定位仪可以自助接收标识卡信息,它以无线信道与邻近基站建立固定的通讯链路,转发各种数据信息建立双向通信联络,承载着位置信息发布和无线自组网双重任务,其中位置信息发布为精确定位算法模型提供了地理信息标杆修正机制,有效提高了定位的精度指标。无线自组网方式为整个网络的部署及优化提供最大的便利。人员标识卡和机车定位仪具有唯一的标识号码,用于标识人员和机车身份。
图1 无线定位系统组成示意图
系统部署时,定位分站以每300~500 m一台的密度安装在井下巷道里,以环形或链型方式构成骨干传输网;地标定位仪随骨干传输网线路布设,彼此间隔10~25 m,并在上位机软件中预置每台定位分站、每个地标定位仪的分布位置;人员标识卡和机车定位仪配置在人员和机车上。定位分站与地标定位仪之间采用RS 485串行通讯,综合通信分站、地标定位仪与人员标识卡,机车定位仪之间采用ZigBee通讯。在ZigBee传输网络中,定位分站是全功能的协调器,人员标识卡和机车定位仪是简易功能的终端,地标定位仪既可以做协调器,也可以做终端。
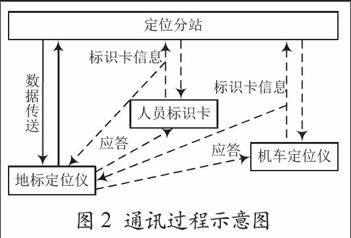
定位分站、地标定位仪、人员标识卡、机车定位仪之间的通信过程如图2所示[3]。其中,人员标识卡和机车定位仪分工作和睡眠两个工作周期并交替转换,睡眠状态下既不接收也不发送信息,工作期间不间断或周期性广播自身信息并侦听和接收定位分站信息。定位分站一般处于接收状态,收到人员标识卡和机车定位仪的信息后应答,并通过光纤将信息发送到上位机;如果人员标识卡和机车定位仪上传有报警信息,分站会将报警信息加入到应答信息中。地标定位仪和定位分站一般处于接收状态,在收到人员标识卡和机车定位仪信息后应答;与定位分站不同的是,在接收到信息后,通过无线方式转发给定位分站。
图2 通讯过程示意图
2 部件设计
2.1 定位分站设计
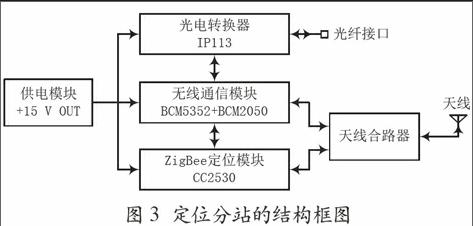
定位分站是系统的核心设备之一,用于组建井下工业以太网传输平台及定位,采用纯本质安全型设计,兼具井下通信、读卡、传输等功能。图3所示为定位分站的结构框图,集成有电源模块、无线通信模块、ZigBee定位模块和天线合路器及天线、光电转换器及光纤接口等[4]。
图3 定位分站的结构框图
2.2 地标定位仪设计
地标定位仪的电路组成如图4所示。它以Atmega1280低功耗MCU为主控芯片,提供数据存储、处理、传输功能。精确定位射频主控芯片采用nanotron公司的NA5TR1,该芯片内置射频发送模块和基于飞行时间的TOF测距算法。射频放大电路采用高增益2.4 G射频放大芯片uPG2250T5N。扩展接口部分外接RS 485转接板,把TTL数据转换为标准的RS 485数据,并检测本安电源AC是否断电;RS 485部分使用LTM2881IY实现,本安电源AC检测功能通过主控芯片IO口检测由本安电源输出的AC状态脚来实现。
2.3 机车定位仪和人员标识卡设计
机车定位仪和人员标识卡设计的硬件组成如图5所示,包括电源模块、ZigBee射频电路、天线模块、声光指示模块。其中,机车定位仪由12~24 V电源供电,人员标识卡由锂电池供电;声光指示模块用于告警和显示报文数据[4]。
图5 机车定位仪和人员标识卡组成框图
3 定位算法
ZigBee定位算法分距离无关定位算法和基于距离的定位算法。其中,前者主要有APIT算法、质心算法、DV-HOP(Distance Vector-Hop)算法等,定位对硬件要求较低,但精度较差;后者包括TDOA(基于到达时间差)算法、AOA(基于到达角度)算法、TOF(基于信号飞行时间时间)算法、RSSI(基于信号接收强度)算法等,它们定位精度高,但对硬件要求较高[5]。本文在ZigBee感知及传输层采用RSSI/TOF算法,利用未知节点和定位分站的几何关系,根据最大似然估计法求得节点距离,并根据双基站协同判别节点方位;在上层软件中,通过对定位数据的预处理,运用标量化拓扑测距判别模型与巷道空间坐标对应的真实位置进行计算和显示。
3.1 RSSI/TOF测距及双基站协同定位原理
实现对机车和人员的定位主要有两层要求,一是要测量出机车和人员与地标定位仪之间的距离,二是要定位其准确的坐标。由于煤矿井下巷道呈狭长分布,只要能测量出机车和人员与指定地标定位仪的距离并判断出左右方位,即可实现较为准确的定位。
3.1.1 RSSI测距原理
RSSI测距是接收节点根据接收信号强度和发射节点信号发射强度,利用信道传输损耗模型将传输损耗转化为距离的一种测距方法。在IEEE802.15.4协议下,简化的信道模型可用式(1)描述[6]:
(1)
式中,Pt为信号发射强度(dBm),d为传输距离(m)。实际应用中,传输模型可简化为式(2):
RSSI=-(10nlgd+PL0) (2)
式中,n为传播指数,PL0为d=1 m时接收信号的强度。
由式(2)可知,信号的衰减与传输距离d成对数关系。d越小,RSSI偏差所产生的距离绝对误差越小;当d大于某一阈值时,RSSI值的波动造成距离的绝对误差明显增大。在煤矿井下环境实际测试时,该阈值在8~10 m。由于地标定位仪的布设间距为10~25 m,使用RSSI法测距可能引起明显误差。要减小误差,一是在成本允许的条件下尽量增大地标定位仪的布设密度,二是利用TOF等算法辅助测距。
3.1.2 TOF测距原理
TOF测距是通过测量无线信号在节点间的传送时间来换算距离,其测距过程如图6所示。节点A(定位分站)测量从发出数据包到节点B(标识卡)确认时间记为TRound,A,B节点测量从收到A节点数据包到B节点回应确认消息的时间记为TReplay,B,数据包在飞行中经历的往返时间记为TRound,AB,则数据包在空中飞行时间Tprop可按式(3)计算[2]:
(3)
计算出Tprop后,根据d=Tprop×c可以计算出标识卡到定位分站之间的距离(c代表光速,取值为3.0×108 m/s )。
图6 TOF测距过程示意图
3.1.3 RSSI/TOF融合测距实现方法
经实地测试,RSSI在标识卡距定位分站距离较近时测距误差较小,而TOF在距离较远时测距误差较小。因此,RSSI/TOF融合测距的方法是通过实验测定一个RSSI的合理阈值,当RSSI值大于设定阈值并呈逐渐增大趋势时,说明标识卡在靠近定位分站,应采用RSSI测距;反之,当RSSI值小于设定阈值并呈逐渐减小趋势时,说明标识卡在远离定位分站,应采用TOF测距[6]。
3.1.4 目标标识卡方位判别方法
由于测距只能获得标识卡与定位分站之间的距离,不能确定标识卡在定位分站左右的位置,因此宜采用双定位分站协同定位。以图7所示三种情况为例,设定位分站1与定位分站2的布设距离为250 m,并设定位分站1测得它与标识卡的距离为d1、定位分站2测得它与标识卡的距离为d2。标识卡位置分布判断方法如下:当d1>250 m>d2,说明标识卡在定位分站2的右侧,如(a)所示;当d1<250 m<d2,说明标识卡在定位分站1的左侧,如(b)所示;当d1<250 m、d2<250 m,说明标识卡在定位分站1、2之间,如(c)所示。
布设定位分站时,两个定位分站天线的间距应大于精确定位的测量精度,且在两个定位分站之间存在盲区的情况下,应增加定位分站密度来消除盲区。对于井下巷道的精确定位,两两配对的定位分站用作基本拓扑单元完成测距和方位判别。一个完整的井下巷道精确定位系统一般需要几十甚至上百个定位分站方可完成信号覆盖,实现全局或重点区域局部连续的精确定位。
图7 标识卡位置判断方法
3.2 上层应用软件对定位数据的处理与展现
(1)数据预处理:对井下的环境,TOF定位算法可能产生折射、绕射等情况,所以对定位数据进行预处理,剔除失真、错误的数据。系统利用历史数据,考虑人员、机车行走速度等限制,引入滤波、限幅的处理方法,使定位数据接近真实值,确保定位精度达到要求。
(2)拓扑关系:定义每个地标定位仪是定位网络的拓扑节点,采用节点间连通性属性描述网络拓扑,并建立节点相邻关系表信息。根据节点相邻关系表,能够获取到定位分站的配对关系和数量,完成对目标标识卡距离和方位的判别。
(3)位置展示:位置展示一般采用标量化拓扑测距判别模型,它需要做的就是将标识卡对应的距离和方位信息传递给矢量化几何地理匹配计算模型,进行与巷道空间坐标对应的真实位置计算和显示。标量化拓扑测距判别模型中的网络拓扑描述信息可以有多种原始输入方式。工程上最简单的做法,可以从基站之间的间隔距离定义关系中自动转换获得,从而使应用系统具有智能学习的能力,降低工程部署的技术条件和要求。
4 结 语
针对矿井人员和机车精确定位需求,利用网络交换机、定位服务器、定位展示机、定位分站(基站)、地标定位仪、人员标识卡、机车定位仪等构建了一套基于ZigBee和工业以太网的定位系统设计方案,利用RSSI/TOF算法实现测距,利用双定位分站协同完成目标标识卡方位判断,从而实现在较远距离范围内对人员和机车的高精度实时定位。目前,该方案已在深圳哲扬、四川维诚、四川信息等企业和高校协同开发的矿井定位系统中形成产品,并已获得了大量应用。
参考文献
[1]黄成玉,李思敏,肖海林.基于ZigBee技术的矿井人员定位算法研究[J].通信技术,2010,43(8):195-198.
[2]常华伟,王福豹,严国强,等.无线传感器网络的TOF测距方法研究[J].现代电子技术,2011,34(1):35-38.
[3]李春雷,刘强,蒋杨定兴,等.无线定位系统及信标卡:中国,201210069227.2[P].2013-09-18.
[4]季文涛,曹日晖,彭敏,等.无线远程智能机车定位系统及报警仪:中国,201210051302.2[P].2013-09-11.
[5]丁辉,李波勇,艾述亮.基于移动信标的无线传感器网络节点定位技术综述[J].电脑知识与技术,2011,21(7):5080-5082,5086.
[6]赵飞.基于TOF/RSSI的公交车载节点组合定位算法研究[J].电子技术应用,2012,38(2):8-10.
