分布式多通道同步采集系统设计
2015-09-19张法全李宗敏王国富叶金才
张法全,李宗敏,王国富,叶金才
(1.桂林电子科技大学 信息与通信学院,广西 桂林541004;2.广西无线宽带通信与信号处理重点实验室,广西 桂林541004)
在微震采集系统中,为了能对微震位置准确定位,各个传感器的数据必须同步采集[1]。在设计中不但要解决各个采集终端之间的同步问题,也要解决同一个采集终端不同通道之间的同步问题。本文开发了一种基于GPS 与ADS1278 的分布式多通道同步采集系统。该系统以24 bit 八通道同步采样A/D 转换器实现同一采集终端不同通道之间的同步采集,相比于传统的频分复用或多A/D 同步转换,其结构更加简单,同步精度更高[2-3]。不同采集终端之间采用GPS 同步,通过使用分相法测量本地秒脉冲信号和1 pps 信号的差值,然后通过PID 算法计算出误差控制量,最后调制恒温晶振,使本地秒脉冲与1 pps 信号同步[4-6]。相比于传统方法,该方法具有同步精度高,实现方式简单等特点。
1 系统设计方案
分布式多通道数据同步采集系统主要由信号调理模块、ADS1278 采样模块、采集控制模块、GPS 接收机模块、液晶显示模块、恒温晶振模块、分频器模块、DAC 调理电路模块组成,系统框图如图1 所示。系统原理:GPS 接收机模块产生时间信息和定位信息在液晶显示模块上进行显示,通过定位信息可以方便野外勘测时信号采集终端和传感器的布设。GPS接收机模块还产生1 pps 信号。恒温晶振模块通过锁相环模块(PLL)将输出频率20 MHz 倍频到200 MHz,然后将信号分别延迟90°、180°、270°,这样可以有效地减小计数误差。通过分频器将倍频后的频率进行分频,得到本地秒脉冲信号和A/D 同步采集信号。利用时钟分相算法测量稳定1 pps 信号和本地秒脉冲之间的误差,用PID 控制算法对时间差进行处理,得到DAC 频率偏差控制量。通过DAC 调理电路对恒温晶振模块输出的频率进行微调,进而使稳定1 pps 信号和本地秒脉冲信号同步,最终使各个采集终端进行高精度同步采集。

图1 系统框图
2 多通道同步数据采集
2.1 前端信号调理
由于接收到的微震信号非常微弱,而环境噪声和干扰很强,故在AD 输入端对微震信号进行调理,以滤除电路的环路噪声,提高共模抑制比。前端调理电路如图2 所示,选用THS4521 作为A/D 的驱动电路,通过差分方式输入,以提高信号的抗干扰能力。由于A/D 差分输入端对地的电压都必须大于0,即

所以,给差分放大器提供2.5 V 的共模电压,使输入电压范围为-2.5 ~ +2.5 V,2.5 V 的共模电压由AD1278 的VCOM 端经过跟随器滤波后提供。为了减小信号的失真,电路中的元件参数应尽可能地对称,设计中选用误差为1%的优质金属薄膜电阻和Panasonic 公司生产的PPS 薄膜电容。
2.2 A/D 转换电路
设计中选用八通道同步采样数模转换芯片ADS1278,其内部集成了8 个并行工作的转换器,每个通道之间的同步采样误差小于500 ps,采样率可达144 kS/s,具有非常低的漂移和带内噪声。ADS1278 可以通过MODE 选择高速、高分辨率、低功耗、低速四种模式。具体设计电路如图3 所示,通过FORMAT 将数据输出格式为SPI 时分复用模式。基准电压使用低噪声精密基准芯片REF5025 产生2.5 V 电压,并经过滤波后输出提供,提高了基准电压的稳定性和抗干扰能力。

图2 A/D 驱动电路

图3 八通道A/D 转换电路
3 GPS 时钟同步
3.1 时间差测量
时钟分相是把时钟周期的多个相位加以利用,将一个周期按相位可分为360°,通过对原时钟做一定延时就可以得到不同相位的时钟信号,然后使用原时钟信号和延时后的时钟信号对时间差进行测量。通过锁相环将20 MHz 的时钟信号倍频到200 MHz,然后将信号分别延迟90°,180°,270°,得到时钟CLK2,CLK3,CLK4。如图4 所示,若只用时钟CLK1 对时间差测量,可测得6 个时钟周期,测量结果为30 ns,其分辨率为5 ns。采用时钟分相算法测量,4 路时钟同时进行计数共测得21 个计数脉冲,即上升沿的个数为21 个,分辨率为1.25 ns,ΔI=26.25 ns,4 级时钟分相算法误差减少了3.75 ns,分辨率提高了4 倍。

图4 时钟分相算法原理
3.2 PID 算法
PID 算法执行过程为通过将本地秒脉冲与1 pps 信号比较,然后得出时间误差,并用这个误差来调节控制器,进而实现本地秒脉冲与1PPS 信号同步。
根据图5,PID 算法可表达式为

其中,e(t)为系统偏差,e(t)=r(t)-c(t),r(t)为期望设定值,c(t)为实际输出值。Kp为增益常数,Ki为积分系数,Kd为微分系数。
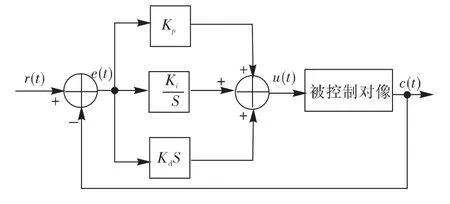
图5 模拟PID 原理框图
对于数字系统,使用一系列离散的采样点来表示连续时间,用累加和来代替积分,用增量代替微分,可以得到数字PID 控制算法:

式中:e(m),e(m-1),e(m-2)分别为当前、上次、前次测量的时间误差,Δu(m)为电压控制量的相对改变量。PID 控制器在ARM 内部完成,ΔT 由FPGA 通过SPI 接口发送给ARM,然后通过该值来计算电压控制量Δu(m),调整DAC 输出电压值来控制恒温晶振的频率。
3.3 恒温晶振调理
DAC 转换电路将转换成电压值,然后对恒温晶振的输出频率进行微调。本设计选用的恒温晶振压控端的控制范围为0 ~5 V,输出频率为20 MHz±10 Hz,中心电压为2.5 V。如图6 所示,设计中选用20 位的高精度数模转换器DAC1220,采用5 V 电源供电,D/A 输出电压范围为0 ~2.5 V,所以采用放大电路OP1177 将电压放大到0 ~5 V,使其范围落在恒温晶振的有效控制范围内。使用高精度和稳定的电压基准芯片REF5025 提供2.5 V 的外部参考电压,然后经过滤波处理后给DAC 提供参考电压。

图6 恒温晶振调理电路
4 实验结果
基于FPGA 和ARM 控制平台,设计了分布式多通道同步微震信号采集电路,实现了时钟分相算法和PID 控制算法。在野外进行勘测时,对同步时钟的精度进行测量,地点选在陕西省府谷县某矿厂附近进行实验测试。使用3 个终端进行实验测试,每个采集终端连接8 个传感器。图7 为其中一个采集终端采集到的微震信号的一段波形。图8 是GPS 同步时钟工作1 h 后,2 个不同采集终端之间的同步采集时钟放大后的波形图,从图中可以清楚地看到,2 个不同采集终端之间的同步采集时钟精度优于150 ns,满足了微震信号采集同步采集的要求。

图7 震动信号采集图(截图)
图8 GPS 有效工作1 小时(截图)
5 总结
针对微震采集系统中分布在不同位置的采集终端和同一采集端不同通道之间数据采集同步的要求,设计并且实现了硬件控制电路和软件算法。使用ADS1278 八通道同步采集芯片实现同一采集终端各个通道之间的同步采集。将稳定1 pps信号和本地秒脉冲利用时钟分相算法进行测量,通过PID 算法将时间差转换成DAC 频率偏差控制量,通过DAC 调理电路对恒温晶振的输出频率进行微调,最终使稳定1 pps信号和本地秒脉冲信号同步,使各个采集终端之间能高精度同步工作。
[1]梁喆,彭苏萍,郑晶.一种微地震采集装置自适应算法[J].中国矿业大学学报,2013,42(4):580-585.
[2]陈红远,郭天太,吴俊杰,等. 多通道微弱电压信号同步采集系统开发[J].电子技术应用,2014,40(2):78-80.
[3]陶海军,张一鸣,曾志辉. 基于AD7606 的多通道数据采集系统设计[J].工矿自动化,2013,39(12):110-113.
[4]吴宁,潘小龙,虞皆侠. 高精度GPS 同步时钟的研究与实现[J].电力系统自动化,2008,32(10):61-65.
[5]张法全,贾少博,高平东,等. 基于FPGA 的高精度同步测量系统[J].仪表技术与传感器,2014(5):57-59.
[6]姜捷.用于雷电探测系统基于GPS 的时钟频率单元[D].武汉:华中科技大学,2011.
