阻燃型组合式整体提升脚手架的设计及应用*
2015-09-18陶云海
耿 涛 陶云海 黄 滔
1.上海建工一建集团有限公司 上海 200120;2.上海东顺建筑工程有限公司 上海 200437
1 工程概况
苏州月亮湾B-05地块工程位于苏州工业园区,由1 栋47 层主楼、1 栋3 层裙房以及3 层地下室组成。主楼建筑总高222.80 m,主楼采用框架-核心筒结构体系。主楼4层以上为标准层,建筑层高4.20 m,其中18层和33层为设备、避难层,建筑层高7.80 m,45~47 层建筑层高4.50 m,屋顶机房层建筑层高6.50 m,本工程主楼标准层单层面积约2 000 m2。
框架结构外轮廓从首层至顶端无收缩变化,其中南北两面为直线段,东西两侧则采用弧形段进行过渡。整体提升脚手架从4层结构施工开始安装,至47层结构施工完毕后拆除,除满足标准层结构施工外,7.80 m超高桁架结构层施工则需要着重考虑[1]。图1为安装完成的阻燃型组合式整体提升脚手架实景。

图1 阻燃型组合式整体提升脚手架实景
2 阻燃型组合式整体提升脚手架设计
1)架体在平面沿结构外轮廓布置一圈形成环通,在立面从上至下共覆盖4 个标准层楼层,架体总高度控制在18 m左右。其中最底部为桁架加强层[2],步高为2 m(图2),桁架层以上均为标准层,标准层架体每步步高为1.8 m。

图2 底部桁架加强层
2)新架体采用了全金属构架,整个架体由φ48 mm钢管内立杆和8#槽钢外立杆组成竖向受力主框架。外侧围护体系和走道板选用阻燃式镀锌钢丝网板,该网板由密目钢丝网外包角钢框。角钢框和主框架通过螺栓形成可拆卸连接方式。底层桁架增强层的上弦和下弦采用6.3#槽钢,腹杆采用50 mm×5 mm等边角钢(图3)。
3)架体沿建筑物一圈共设置40 个机位,机位间最大跨度控制在5.3 m。机位处设置100 kN环链式电动葫芦,采用动力同步系统控制架体的升降,分别设置总质量和单机质量的上下限,当任何一机位发生超载或欠载时,均能自动报警并切断总电源,起到安全保障作用。

图3 全金属阻燃式框架体系
4)为防止架体在升降过程中因悬臂过高而出现倾覆现象,在每一提升机位处均必须设置上下2 道防倾装置。该防倾装置由防倾导轨,导向滑轮机构和连接件3 部分组成,防倾导轨为10#工字钢,其一侧由竖向间距为0.9 m的连接件扣于机位处竖向主框架的双立杆上,导向滑轮机构一端固定于建筑物结构层上,一端卡于10#工字钢的槽内,当架体作上下升降运动时,滑轮组与工字钢之间只能作上下相对移动,从而起到防止架体向外或向内倾斜的作用。
3 阻燃型组合式架体安装
3.1 安装技术路线
1)架体所有构件在工厂预制完成后运抵现场。结合施工进度,安装过程分地面组装和空中拼装2 个阶段。
2)在结构楼层进入标准层施工后开始吊装架体单元,每施工一层,架体安装一层即2 个步高,待连续施工4 个结构楼层后,架体完成所有拼装步骤,形成整体提升脚手架体系,跟随结构施工逐层提升。
3)地面组装时应结合现场施工场地布置和结构施工进度,组装一层,吊运一层,拼装一层,避免因施工场地紧张或工序衔接出现问题继而影响工程总体进度。
3.2 安装流程
在地面进行竖向主框架与底部水平桁架安装,组装一层→进行吊装→完成首层的拼装→矫正水平→设置首层硬拉结→随结构再次进行架体的吊装拼装→安装下拉杆并与结构有效固定→随结构进行架体搭设及硬拉结→上拉杆固定、安装电动葫芦及防倾覆装置→安装调试架体同步控制系统,设置超载上限和欠载下限→利用同步控制系统测量架体总质量与单机质量→联合验收合格→机械检测中心检测合格→爬升准备
3.3 地面组装
1)地面组装时,根据塔吊的吊装能力,合理划分每一榀吊装单元。其中高度方向控制2 个步高,水平长度方向控制2 个机位间距。
2)逐步安装竖向主框架,竖向主框架之间用M12的连接螺栓进行连接固定,严格控制好竖向主框架的垂直度,同时控制好脚手架水平平整度。图4为地面组装示意。
3.4 空中拼装
1)将原有非标准层落地脚手架体系先拆至架体安装楼层标高,在上面搁置最底部桁架层组装单元(图5)。
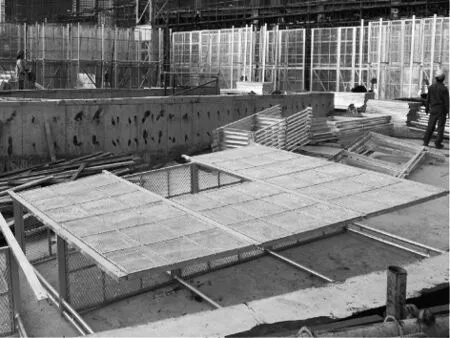
图4 地面组装单元

图5 架体空中吊装和拼装
2)单位架体落位后,沿长度方向上由一边向另一边逐片拼接每榀单元,将镀锌钢丝网板与外侧围护和走道板用M12螺栓连接,将各个机位竖向主框架连成整体。
3.5 动力提升设备安装
1)安装防倾覆装置。防倾导轨用U形螺栓与机位竖向主框架连接固定,防倾导轨必须保持垂直。防倾装置一头导向轮卡于防倾导轨内,另一头用M27的穿墙螺栓与建筑物主体连接固定。
2)安装钢梁。钢梁一头用M27穿墙螺栓与建筑物主体连接,另一头利用花篮拉杆固定在上层结构体系上。
3)安装电动葫芦:电动葫芦一头挂在钢梁上,另一头挂在承力托架上。
4 架体升降
4.1 架体的升降技术路线
根据层高不同,将架体的升降作业分成普通标准层和7.8 m超高桁架层区别对待,桁架层的架体升降须结合结构施工进行优化。
4.2 升降流程
验收、检测合格→检查各受力点,电动葫芦预紧情况、防倾装置、防坠装置是否齐全→确认无误,拆除下拉杆固定螺栓和每层硬拉结→试提升(下降)10 cm→正常提升(下降)→提升(下降)到位后,安装下拉杆固定螺栓和每层硬拉结,架体底部封闭,隔离恢复→验收合格后,交付使用→结构施工
4.3 标准层爬升
1)爬升前的检查。包括防倾装置是否安装到位并且有效可靠;电动葫芦是否预紧并且处于完全受力状态;防坠吊杆是否安装到位并且有效可靠;脚手架与建筑物之间是否有障碍物存在,如有障碍物应及时拆除;架体上是否有其他荷载存在,如有应及时清理至楼层等。
2)试升降10 cm,观察附着升降脚手架的运行情况是否正常,同时观察电动葫芦运行情况是否正常、有无异常声响。如发现异常,及时警示。
3)确认无误后正式开始升降作业,整个爬升过程分为4 个步骤[3,4]。
步骤一:初始状态。最上方结构楼层施工完毕,此时整体提升脚手体系通过下拉杆与结构形成可靠连接。
步骤二:预紧电动葫芦,松开下拉杆,完成支撑体系和提升体系受力转换。
步骤三:利用电动葫芦同步提升脚手架。
步骤四:架体提升到位,利用下拉杆与架体连接固定,提升体系与架体支撑体系完成受力转换。
4.4 7.8m超高桁架层升降
4.4.1 施工流程优化
由于桁架层的高度达到了7.8 m,比标准层4.3 m层高高出3.5 m。如通过增加架体高度的方法满足该层结构施工需求,势必对架体的受力性能重新分析,同时每次通过桁架层的增设及拆除架体也会对工程进度和施工安全带来影响。因此我们对桁架层的结构施工流程进行了优化,同时有针对性地在通过桁架层时,增加架体的临时加固、拉结等一系列安全措施。
1)分段浇筑。将7.8 m高桁架层分2 次3 900 mm浇筑,跟随结构的分段施工,整体提升脚手架在穿过此层时同样分2 次提升,浇完一段,提升架体,再施工上一段,确保脚手架外围护体系始终高于施工作业楼层面。
2)增加临时防倾导轨。为防止架体在爬升过程中穿越7.8 m层高而产生倾覆,在原有防倾导轨基础上,在立杆顶端增设1 道临时防倾导轨,确保架体在升降过程中的垂直度与稳定性。
3)搭设独立方架。在桁架层结构楼面对应外圈机位所在位置用φ48 mm钢管搭设独立方架,其中立杆横距0.8 m,纵距0.8 m,步距1.8 m,该独立方架端部与桁架层钢结构作临时搭接,另一端与脚手架体系内侧立杆相连接,并设置抛撑进行临时加固。
4.4.2 施工工况说明
由于架体升降原理和标准层基本一致,这里仅针对爬升过程中离开和进入桁架层的特殊工况进行说明。
1)进入桁架层。18层结构楼板施工完成,准备7.8 m高桁架层及19层施工,架体提升半个层高即3.9 m,搭设独立方架,增加临时防倾装置,同时加设抛撑,确保高悬臂架体不发生倾覆现象(图6)。
2)离开桁架层。21层结构楼板施工完成,准备22层结构楼板施工,架体提升到位后,架体底部离开18层楼面3.6m,利用独立方架与架体增加临时拉结,同时在架体与楼面空当处兜设安全网(图7)。
5 阻燃型组合式整体提升脚手架拆除
依照架体的安装步骤,架体的拆除依然由2 个阶段组成,第1阶段为架体的分段空中解体,第2阶段为架体的分步地面散拆。

图6 架体进入桁架层工况
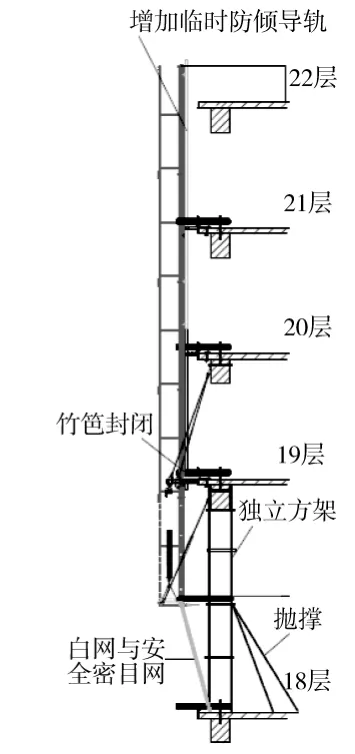
图7 架体离开桁架层工况
1)拆除准备。在施工区域的楼层面和相对应的地面范围内画出警戒范围,警戒区域内严禁人员进出。同时应将架体上的建筑垃圾及零星设备材料进行全面清理。
2)分段拆除的起吊能力,一般以2~3 个机位之间的架体作为1 个吊装单元,立面上无需再进行分段,按顺时针或逆时针方向依次拆除。
3)松开螺栓,将外侧围护、走道板与竖向框架进行分离,考虑到架体最底部螺栓处于封闭的跳空状态,为避免破坏式的拆除方式,设计时采用了多功能一体式翻转隔离走道板,翻板打开时,可有足够的空间拆除螺栓。
4)分段解体后的架体到地面后,应水平搁置在枕木或槽钢上,依次拆除。
6 结语
阻燃型组合式整体提升脚手架工厂化程度高,架体一次搭设成型,无需继续占用施工场地,有效解决了施工场地日趋狭小的困境;由于拆装方便,能节约大量劳动力。与传统的钢管附着式提升脚手架相比,全新的阻燃型组合式整体提升脚手架体系将拥有更广阔的前景。
