改进的配电网反时限过电流保护
2015-09-18郭煜华范春菊邓桂敏
郭煜华,姜 军,范春菊,邓桂敏
(上海交通大学 电气工程系,上海 200240)
0 引言
随着电网智能化水平的提升,微电网技术得到了迅速的发展,包括光伏电池发电、风力发电、储能技术等分布式发电DG(Distributed Generation)在配电网中得到了广泛的应用[1-7]。
与传统配电网相比,含有微电源、线路与负荷的配电网具有一定的独立运行能力,但微电源的存在、复杂的故障特性等均给原有保护配置带来了新的问题,使得传统的配电网继电保护不再适用[8-13]。文献[14]结合微电网结构和故障特点提出了一种基于负荷阻抗的微电网反时限低阻抗保护,但该保护实现复杂,可靠性较低。本文提出了2种适用于含DG配电网的反时限过电流保护方案,即基于通信的反时限过电流保护和改进的低电压加速反时限过电流保护。这2种保护方案的实施,可以有效改善反时限过电流保护在微电网中应用的动作特性以及保护之间的配合特性,具有良好的应用价值。
1 反时限过电流保护在微电网中的应用特性
1.1 传统反时限过电流保护的整定与配合
电力系统的反时限过电流保护的动作时间与被保护线路中的故障电流大小有关,它是利用继电器的反时限动作特性构成的,保护的启动电流如式(1)所示。

其中,ILmax为系统正常运行时的最大负荷电流;Kre为电流继电器的返回系数,一般取0.85~0.95为可靠系数,一般取1.15~1.25;Kss为自启动系数,数值大于1,由网络具体接线及负荷性质来确定。
为了保证各保护之间动作的选择性,其动作时限应该逐级配合确定。图1所示为一简单的配电网网络接线图,保护3的启动电流按式(1)整定为Iact.3,其动作时间为t3。保护3出口短路时,其动作的时间为继电器的固有动作时间tb,由此确定保护3的反时限特性曲线。然后根据选择性的要求,保证在保护3出口短路时,保护2的动作时间比保护3的动作时间高出一个Δt,由此确定保护2的反时限动作特性曲线。依此逐级进行整定配合,可以得到各保护的反时限特性曲线[15]。图2为各保护逐级配合示意图,横轴为故障位置,纵轴为动作时间,曲线1、2、3分别为保护1、2、3的反时限特性曲线。

图1 配电网接线图Fig.1 Wiring diagram of distribution network
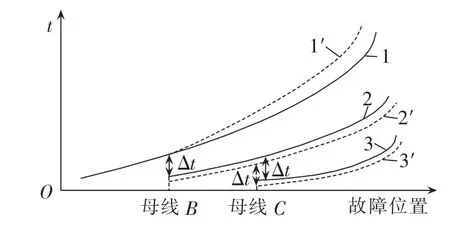
图2 各保护逐级配合示意图Fig.2 Protective coordination among different stages
1.2 传统反时限过电流保护应用在微电网中存在的问题
图3为微电网雏形,即含有DG的配电网系统结构图。在该配电网系统结构图中,E为系统电源,DG为接入配电网的分布式电源。
接入DG后,由于助增电流的影响,各保护动作特性曲线有所变化。
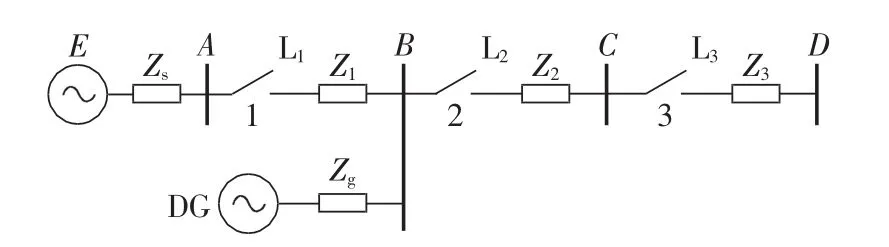
图3 含有分布式电源的配电系统结构图Fig.3 Structure of distribution network with DG
a.对于DG下游保护2和保护3,接入DG后该配电线路仍为单侧电源辐射状配电网络,按照传统的反时限过电流保护整定原则来进行整定,保护2和3的动作时间能够配合,满足继电保护对选择性和速动性的要求。但接入DG相当于系统容量增大,因此相同位置发生故障时故障电流也会增大,导致动作特性曲线下移。
b.对于DG上游保护1和下游保护2,接入DG后:当线路L2发生故障时,DG会向保护2提供助增电流IDG,流过保护2的故障电流Ik2为流过保护1的故障电流Ik1与IDG之和,大于Ik1,保护1和保护2的时间配合会受到影响;而流过保护1的故障电流和未接入DG时相比有所减小,保护1动作时间将延长,动作特性曲线上移,保护性能降低;当线路L1发生故障时,流过保护1的故障电流与DG支路无关,动作特性曲线不变。
接入DG后各保护的动作特性曲线变为图2中的曲线1′、2′和3′。为保证保护的速动性和保护之间的配合特性,下文提出了2种改进的反时限过电流保护方案。
2 基于通信的反时限过电流保护方案
针对接入DG后对反时限过电流保护的影响,本文提出了一种基于通信的反时限过电流保护的方案。系统结构图如图3所示。
2.1 DG下游保护之间的配合
对于DG下游的保护2和保护3,接入DG前后,该配电线路均为单侧电源辐射状配电网络,不影响保护间的配合特性,可以按照传统的反时限过电流保护的整定原则整定。保护2和3的启动电流按式(1)整定,各段保护启动电流值为 Ipi(i=2,3)。
保护2和3的反时限动作方程参照式(2):

其中,Ii为保护2或3测量到的故障电流。
对于保护3,在其出口处发生三相短路时,其动作时间整定为继电器的固有动作时间tb,则可以得到保护3的反时限动作方程时间常数为:

对于保护2,根据保护选择性的要求,在保护3出口处发生故障时,保护2的动作时间要比保护3的动作时间至少高出1个Δt(可以设为0.5 s)。所以,在保护3出口处发生故障时,保护2的动作时间为t2=Δt+tb。故可得到保护2的反时限动作方程时间常数为:

根据上述方法进行整定,可以得到保护2和保护3的反时限动作方程。
2.2 DG上游线路保护与下游线路保护之间的配合
DG的类型有风电、光伏发电、储能电站等。系统短路时,DG提供的短路电流随着DG类型、控制策略、短路位置的不同而不同,使得保护的整定变得困难。但是,借助通信信道传递DG提供的短路电流信息,可以实现DG上、下级保护的有效配合。
对于DG下游的保护2和DG上游的保护1,保护1的启动电流按照式(1)整定。为了获得保护2出口短路时DG的助增电流,在保护1和DG侧分别装设通信装置,借助通信信道,将DG侧的助增电流相量IDG发送给主电源E侧保护1,流过保护1的故障电流Ik1加上接收到的DG的助增故障电流相量IDG作为保护1的反时限动作时间方程中的测量电流I。对保护1的反时限动作时间方程进行调整后,保护1的动作时间如式(5)所示。下文中白斜体表示的电流为对应电流的标量形式。
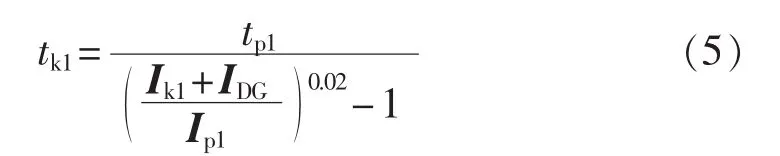
根据保护选择性的要求,在保护2线路出口处发生故障时,保护1的动作时间要比保护2的动作时间至少高出1个Δt,此时保护1的动作时间为tk1=tk2+Δt,其中tk2为保护2的动作时间:

则保护1的反时限动作方程时间常数为:

这样就能够消除接入DG后DG所提供的助增电流IDG的影响,使得保护1和保护2能够有效配合动作,改善了保护之间的配合特性。针对接入DG对原有反时限过电流保护所产生的影响,基于通信的反时限过电流保护改善了DG两侧保护间的配合情况,并且无需考虑DG故障后助增电流的特性,保证了相邻线路后备保护的速动性。
3 改进的低电压加速反时限过电流保护方法
3.1 低电压加速反时限过电流保护原理
线路发生短路故障时,故障点越接近保护安装处,保护测得的电压越小,短路电流越大,保护的动作时间应该越短。但是由于传统反时限过电流保护之间的配合,使得保护出口短路时,保护的动作时间比较长,为了解决这个问题,文献[16]提出了低电压加速反时限过电流保护。在反时限过电流保护的动作方程中引入低电压加速因子u*,能够改善反时限过电流保护的性能。引入低电压加速因子u*后的反时限动作方程为:

其中,Ip为整定电流。
发生不同类型的故障时,其对应着不同的电压特征。保护检测到系统发生故障后,可以测量3个相电压和3个线电压的数值,并进行比较,u*取其中最小的值。这样使得不同类型故障发生的情况下,保护的动作时间都有最好的改善效果[16]。
线路发生故障时,低电压加速因子u*的大小与故障点和保护之间距离成正比例关系,即保护装置越接近故障点,其低电压加速因子越小,保护的动作速度越快。保护的加速作用随着故障点与保护的距离而变化,其最大优点便是确保了在线路出口处发生严重故障时保护可以快速地动作以切除故障,另外,配电网的线路都比较短,在线路内部故障时,保护的动作时间都比较短。
3.2 引入低电压加速因子对反时限过电流保护配合的影响
系统结构图仍如图3所示。以保护2和保护3为例,未引入低电压加速因子时,按照式(1)—(4)的方法整定确定,动作时限相差1个Δt。引入低电压加速因子后,反时限动作方程为式(8)。保护3出口短路时,保护2和保护3处的电压标幺值分别如方程式(9)和(10)所示。

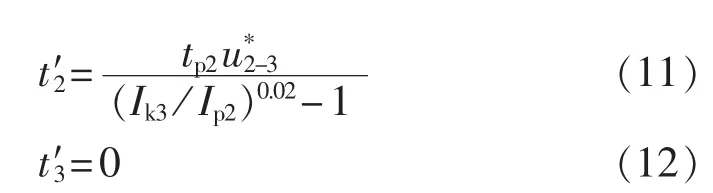
根据式(9)和(11)可得 t′2-t′3<Δt,保护 2 和保护3之间的时限配合不能满足选择性的要求。同样,DG上下游的保护1和保护2之间的时限配合也无法满足要求。因此,必须对低电压加速反时限过电流保护进行改进。
3.3 低电压加速的反时限过电流保护的改进方案
图2中,各保护反时限过电流保护的动作方程如式(1)所示。引入低电压加速因子后的低电压加速反时限过电流保护配合方案如下。
a.保护 3 仍按式(1)和(3)整定。
b.对于保护2,根据选择性的要求,在保护3出口发生三相短路时,保护2的动作时间比保护3高出Δt,而在低电压加速因子的作用下,保护3瞬时动作,故保护2的动作时间为 Δt。 将 t′2=Δt代入式(11)中保护2的动作时限方程,可得方程式(13):

令Kp2为保护2的配合系数:

则保护2改进的反时限动作方程的时间常数为:

c.对于DG上游的保护1,根据选择性的要求,一方面保护2出口三相短路时,保护1的动作时间要高出Δt,而在低电压加速因子的作用下保护2可以瞬时动作,故保护1的动作时间为Δt,其动作方程为:


将 t1=Δt代入式(16),则时间常数为:

另一方面,在保护3出口三相短路时,保护1的动作时间要比保护3高出2Δt,而保护3可瞬时动作,故保护1动作时间为2Δt。同样地,保护1的动作方程为:


将 t1=2Δt代入式(19),则时间常数为:

为了保证保护2和保护3出口处短路时,保护1均能满足选择性的要求,因此比较tp1-1和tp1-2的大小,取较大者作为保护1的时间常数tp1,即:

按照上述方案对反时限过电流保护的参数进行整定后,引入低电压因子的反时限过电流保护在时限上就能够很好地配合,满足选择性的要求。
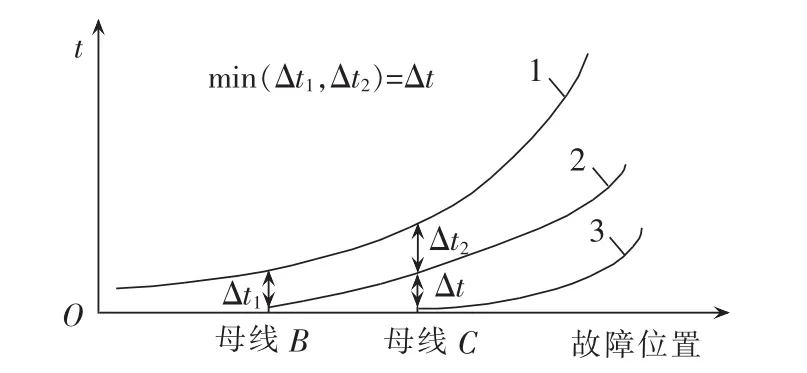
图4 改进的低电压加速反时限过电流保护动作时间曲线Fig.4 Operating time curves of improved low-voltage acceleration ITOC
图4所示为应用低电压加速反时限过电流保护配合方案后的保护1、2和3的动作曲线图。可以看到,在保护3出口三相短路时,保护2和3的动作时间差为Δt,满足选择性的要求;而保护2、保护3出口三相短路时,保护1和保护2也能够配合,在其中一个短路位置处能够保证动作时间差最短,为Δt。
4 仿真验证与比较
在PSCAD中搭建配电网络图5所示含DG的低压配电系统,电压等级为10 kV。E为主电源,系统阻抗 Zs=0.7+j0.458 Ω。 配电线路 L1、L2、L3长度均为1 km,线路单位长度的线路阻抗Zl=0.26+j0.255 Ω。DG接在母线B上,DG等效阻抗Zg=7+j4.6 Ω。保护1、2、3为相应配电线路安装的保护,K1、K2、K3分别为保护出口处的故障点位置。
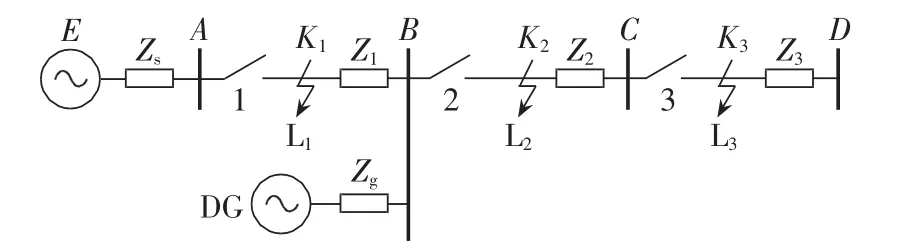
图5 含分布式电源的配电网系统结构图Fig.5 Structure of distribution network with DG
4.1 基于通信的反时限过电流保护方案
各保护的启动电流按式(1)整定,动作时限表达式和相关参数按照2.1和2.2节的方法确定。在仿真中设置不同故障点和故障类型,仿真结果如下。
K3点发生不同类型的故障时,各保护的动作情况如表1所示,K2点发生不同类型的故障时,各保护的动作情况如表2所示,不同情况下保护动作时间如图6所示。
仿真结果表明,应用了基于通信的反时限过电流保护方案后,保护1作为保护2、3的后备保护时动作时间缩短,改善了保护间的时限配合,提升了保护性能。在发生两相故障时,改善效果最为明显。
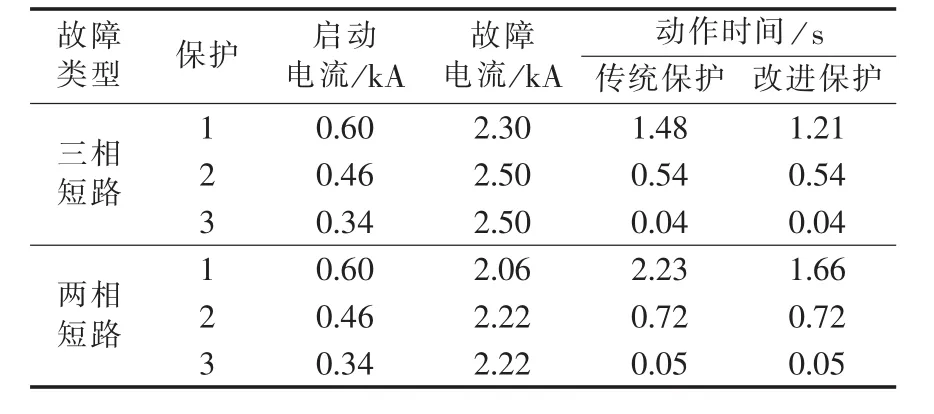
表1 K3点短路时各保护动作情况Table 1 Operational data of protections when short circuit occurs at K3
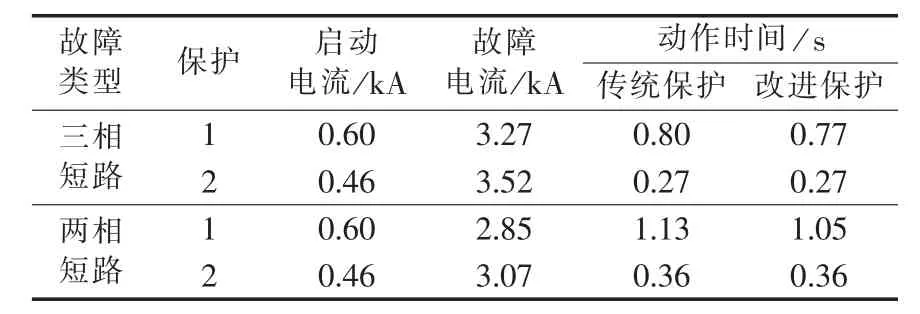
表2 K2点短路时各保护动作情况Table 2 Operational data of protections when short circuit occurs at K2
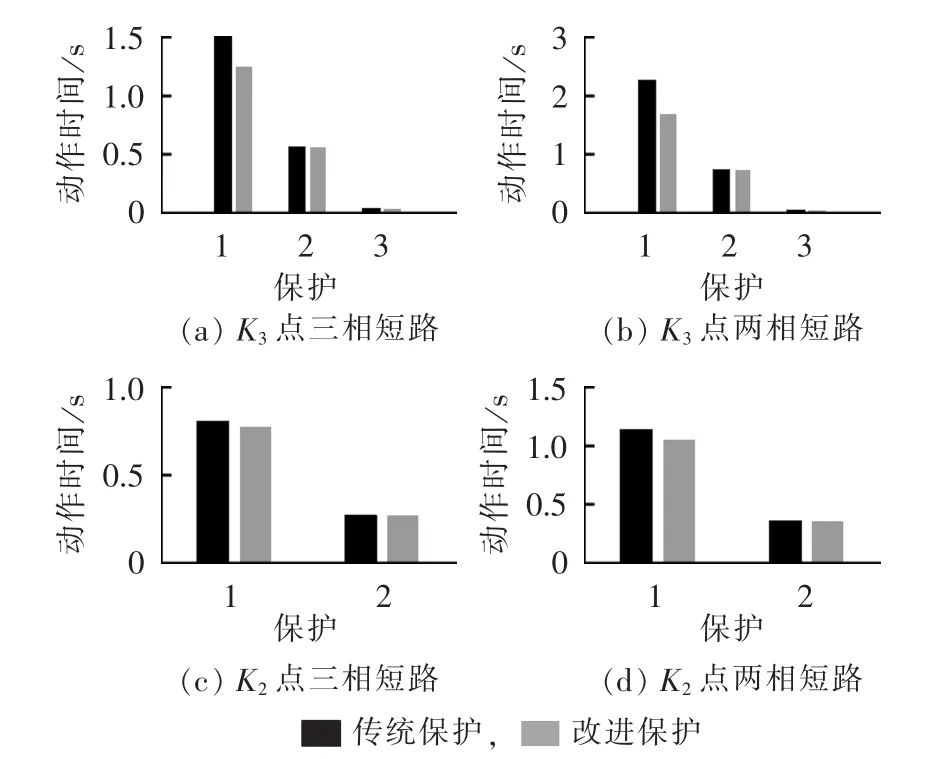
图6 不同短路类型与短路地点下的保护动作时间Fig.6 Operating time of protections for different short circuit types and locations
4.2 改进的低电压加速反时限过电流保护方法
在仿真中设置不同故障点和故障类型,分别计算传统反时限过电流保护、引入低电压加速因子的反时限过电流保护,以及低电压加速反时限过电流保护配合方案的动作时间。
K3点发生不同类型的故障时,各保护的动作情况如表3所示,K2点发生不同类型的故障时,各保护的动作情况如表4所示,不同情况下保护动作时间与上、下级保护配合情况如图7所示。图中,Δt1-2和Δt2-3分别为保护1和2、保护2和3的动作时限之差。
上级保护的动作时限至少应比下级高1个Δt。传统保护、仅引入低电压加速保护、改进配合的低电压加速保护在各种短路情况下能否满足配合时限要求的情况列于表5,表中,“√”表示满足,“×”表示不满足。
从仿真结果可以看出,引入低电压加速因子后,传统反时限过电流保护的配合可能失去选择性。采用改进的低电压加速反时限过电流保护配合方案后,既能保证大部分情况下保护出口故障时快速动作,又能满足相邻线路保护动作时限的配合要求。
4.3 2种改进方法的比较
从保护原理上分析,基于通信的保护方法整定简单,且不受DG特性的影响,只需要传递DG支路电流,适用于有保护间通信条件的配电线路;改进的低电压加速保护方法只需修改整定方法,具有动作时间短、无需通信信道的优点,但动作时间受到DG故障特性的影响,并且需要测量故障后线路的电压量作为低电压加速因子。
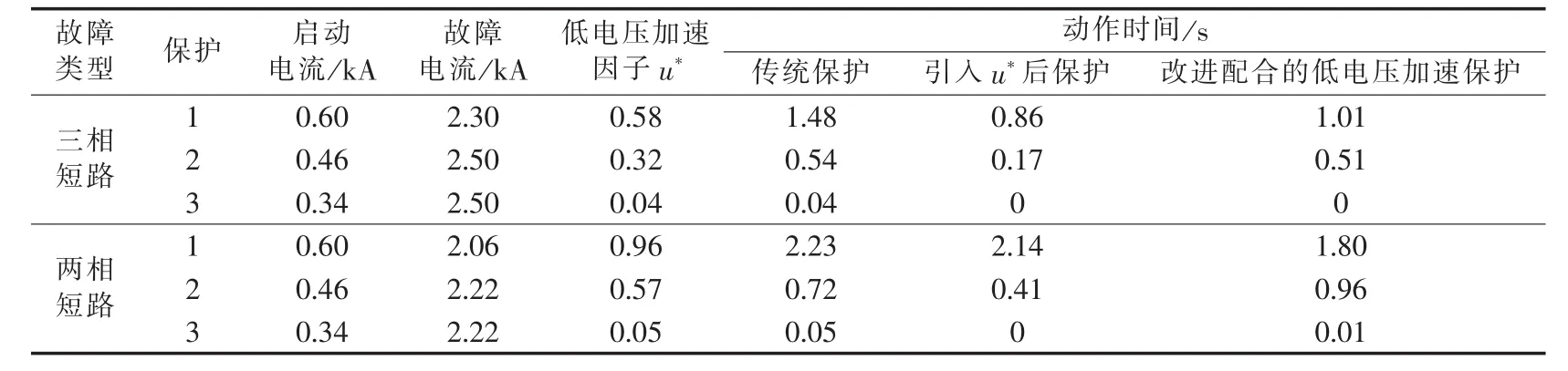
表3 K3点短路时各保护动作情况Table 3 Operational data of protections when short circuit occurs at K3

表4 K2点短路时各保护动作情况Table 4 Operational data of protections when short circuit occurs at K2
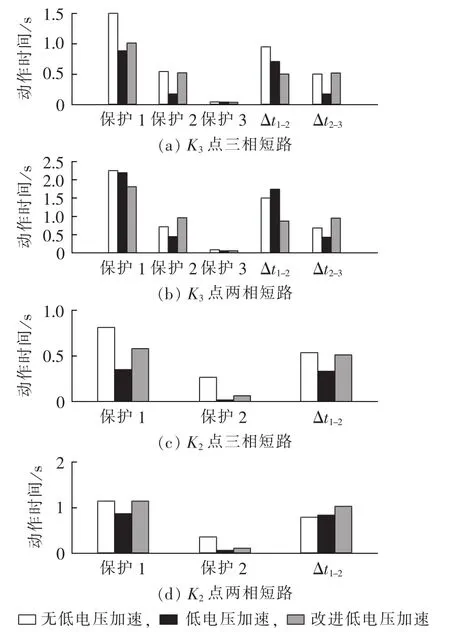
图7 不同短路类型与地点下的保护动作时间Fig.7 Operating time of protections for different short circuit types and locations
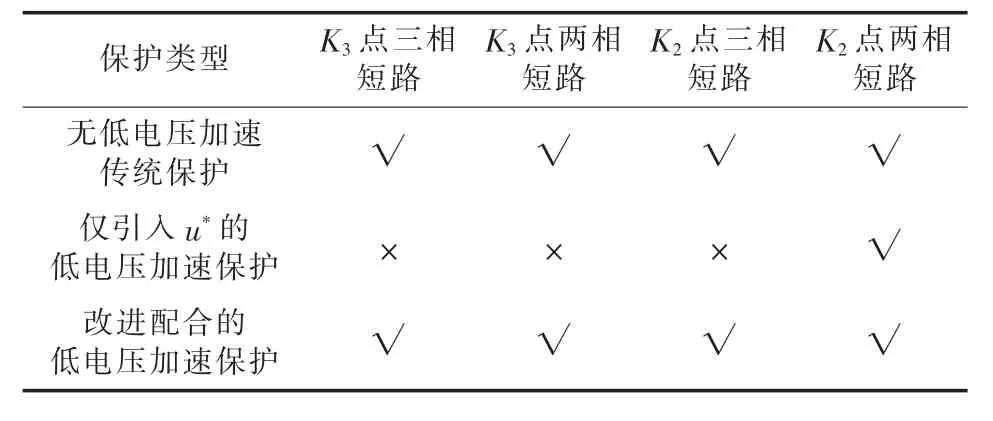
表5 3种保护在各短路情况下满足配合时限要求情况的比较Table 5 Comparison of operating time coordination among three protection types for different short circuit conditions
从仿真结果来看,2种改进的反时限过电流保护方法都能有效满足速动性和选择性的要求,可以作为线路后备保护。
5 结语
针对含DG配电网的反时限过电流保护可能存在的保护速动性降低的问题,本文提出了2种改进方法。本文提出了基于通信的反时限过电流保护方案,借助通信信道将短路时DG提供的馈电流传递至上游保护,在保证选择性的前提下最大限度地提高了保护的速动性。同时,本文提出了低电压加速反时限过电流保护的配合方案。低电压加速反时限过电流保护应用到含DG的配电网中,确实可以加速反时限过电流保护的动作时间,尤其是改善了保护出口故障的动作时间。但是,引入低电压加速因子可能导致反时限过电流保护间的协调配合,影响保护的选择性。本文提出了改进的低电压加速反时限过电流保护,能够消除低电压加速因子对动作时限的影响,确保上下级保护动作时限的配合。这2种保护方案的实施,可以有效改善反时限过电流保护在微电网中应用的动作特性以及保护之间的配合特性,具有良好的应用价值。
