GPS在大坝变形观测中的应用
2015-09-17胡小兵
胡小兵 陈 帅
(1.晋中市潇河流域管理局,山西晋中 030600;2.晋中市松塔水利水电有限公司 山西晋中 030600;3.山西水利职业技术学院 山西运城 044004;4.山西运城市普林工程设计有限公司 山西运城 044004)
1 测区概况
松塔水电站坝址位于寿阳县草庄村的潇河主流——松塔河上,控制流域面积1 174 km2,以城市生活、工业供水及水力发电为主,兼顾防洪、灌溉等综合利用。水库库容9 740万m3,大坝为碾压式均质土坝,最大坝高62.60 m。
大坝是水利枢纽的重要组成部分,起着防洪、调节水位的作用,它的安全运营状况尤其重要,因此要对其进行稳定性监测。位移监测就是其中的一项重要内容。大坝变形监测通常是建立高精度的监测网,由于受地形等条件的限制,这种监测网的网形强度较差,从而使监测点的点位精度受到很大影响。另外传统方法观测时间长,劳动强度大,难以实现自动监测。利用GPS进行水平位移观测可获得2 mm的精度位移矢量[1]。本次监测分为基准网平面复测和监测网平面测量。
2 基准网平面复测
2.1 基准网的平面测量精度[2]
基准网由基准点和工作基点组成。根据《水利水电工程施工测量规范》2.1.2规定,本工程属中型水利水电工程的土石建筑物施工期变形监测,首级平面控制网可选用四等平面控制网。水平位移监测拟采用GPS方法进行,基准网选取D级GPS网(相当于四等精度)。
①相邻点间基线长度精度用下式表示:

式中:σ——标准差(基线向量的弦长中误差mm);
a——固定误差(新布设GPS网采用仪器标称精度);
b——比例误差系数(新布设GPS网采用仪器标称精度);
d——相邻点间距离,km。
②同步环闭合差为:

③独立闭合环或闭合路线坐标闭合差应满足:

式中:n为闭合环边数;
⑤无约束平差后各基线分量的改正数绝对值均应满足:

⑥约束平差后基线向量的改正数与无约束平差结果的同一基线相应改正数较差的绝对值均应满足:
dVΔX≤2σ;dVΔy≤2σ;dVΔz≤2σ。
⑦点位误差≤3 mm。
2.2 基准网测量实施
为了保证对原有平面控制点的正确使用,选取松塔水电站移交控制点ST01、ST02、ST03进行复测,作为本次监测计算和校核的基准点。
根据原有控制点的坐标数据,点位分布如图1所示:

图1 基准点位分布图
2.2.1 外业观测
①基本情况
GPS测量使用3台中海达V8型双频GPS接收机观测,仪器标称水平精度2.5 mm+1ppm×D,高程精度 5 mm+1ppm×D。
外业观测采用GPS静态定位作业模式,观测时段可在UTC时间0~24 h之间任意选取,但不得跨越UTC时间0 h(北京时间8 h)。GPS网观测基本规定见表1。
2.2.2 数据处理

表1 GPS网观测基本规定
①外业观测数据处理
D级GPS网数据处理使用随机软件“HGO”软件解算,按单基线双差固定解作为最终结果。
②外业观测数据质量检核
根据数据处理后的基线双差固定解按照2.1所述主要精度指标对复测基线、同步环、异步环进行数据质量检核,如超限应剔除超限基线或重测,直到符合要求为止。
③平差计算
在基线向量检验符合要求后,按照《GPS规范》的要求,进行D级GPS网进行无约束平差和约束平差。
④GPS网无约束平差
D级GPS控制网无约束平差以基线向量检验符合要求后的三维基线向量及其相应方差—协方差阵作为观测信息,以ST02点的WGS-84坐标系中的三维坐标为起算依据,进行GPS网的无约束平差。
无约束平差中,各基线分量改正数绝对值应满足:VΔx≤3σ;VΔy≤3σ;VΔz≤3σ。
⑤WGS-84坐标系三维约束平差
为检核高等级GPS点位精度情况,在D级GPS网三维约束平差前采用不同的方案进行不同组合试算、并将平差结果与已知点成果进行比较分析,以便剔除点位位移的高等级点,获得最优的平差方案。
平差结果应输出在相应坐标系中的三维或二维坐标、基线向量改正数、基线边长、方位、转换参数及其精度信息。
三维约束平差中,基线分量改正数与无约束平差结果的同一基线,相应改正数较差的绝对值应满足:dVΔX≤2σ;dVΔy≤2σ; dVΔz≤2σ。 见表 2 同步环精度。

表2 同步环精度
⑥北京54坐标系三维约束平差
利用无约束平差后的可靠观测量,在北京54坐标系下进行三维约束平差,平差结果应输出在相应坐标系中的三维或二维坐标、基线向量改正数、基线边长、方位、转换参数及其精度信息。
三维约束平差中,基线分量的改正数与无约束平差结果的同一基线,相应改正数较差的绝对值应满足:dVΔX≤2σ;dVΔy≤2σ;dVΔz≤2σ。见表3基线较差。

表3 基线较差
2.2.3 解算成果
经过比较分析,由ST01、ST02作为已知点解算ST03,坐标 Δx=+2.4 mm,Δy=-18.8 mm;由 ST02、ST03作为已知点解算ST01,坐标Δx=-0.8mm,Δy=+3.1mm;由ST01、ST03作为已知点解算ST02,坐标Δx=+5.3mm,Δy=-4.9 mm。基线ST01—ST02长度361.645 2 m,反算边长361.647 4 m,相对误差为1/164 384;基线ST02—ST03长度792.659 8 m,反算边长792.652 4 m,相对误差为 1/107 115;基线 ST01—ST03长度945.0425m,反算边长945.0331m,相对误差为1/100 535。其解算均满足四等1/8万精度要求。考虑到ST03距离水库较近,ST01和ST02距离水库较远,且构成网形强度较高,故以ST01和ST02作为平面监测的起算点。
3 监测网平面测量
3.1 监测网的平面测量精度
监测网由部分基准点和监测点组成。根据GPS网逐级布设的原则,监测网平面测量选用E级GPS网。
E级GPS网的基线长度、环闭合差、坐标闭合差、重复基线较差等精度计算公式同2.2.1。
3.2 监测网测量实施
3.2.1 外业观测
采用E级GPS进行平面测量。测量仪器同2.2。根据基准网的测量成果,选取ST01、ST02作为监测网的起算点。组成网型结构较强的监测网,并进行监测测量如图2。

图2 监测点网图
3.2.2 数据处理结果
三维约束平差部分结果见表4。
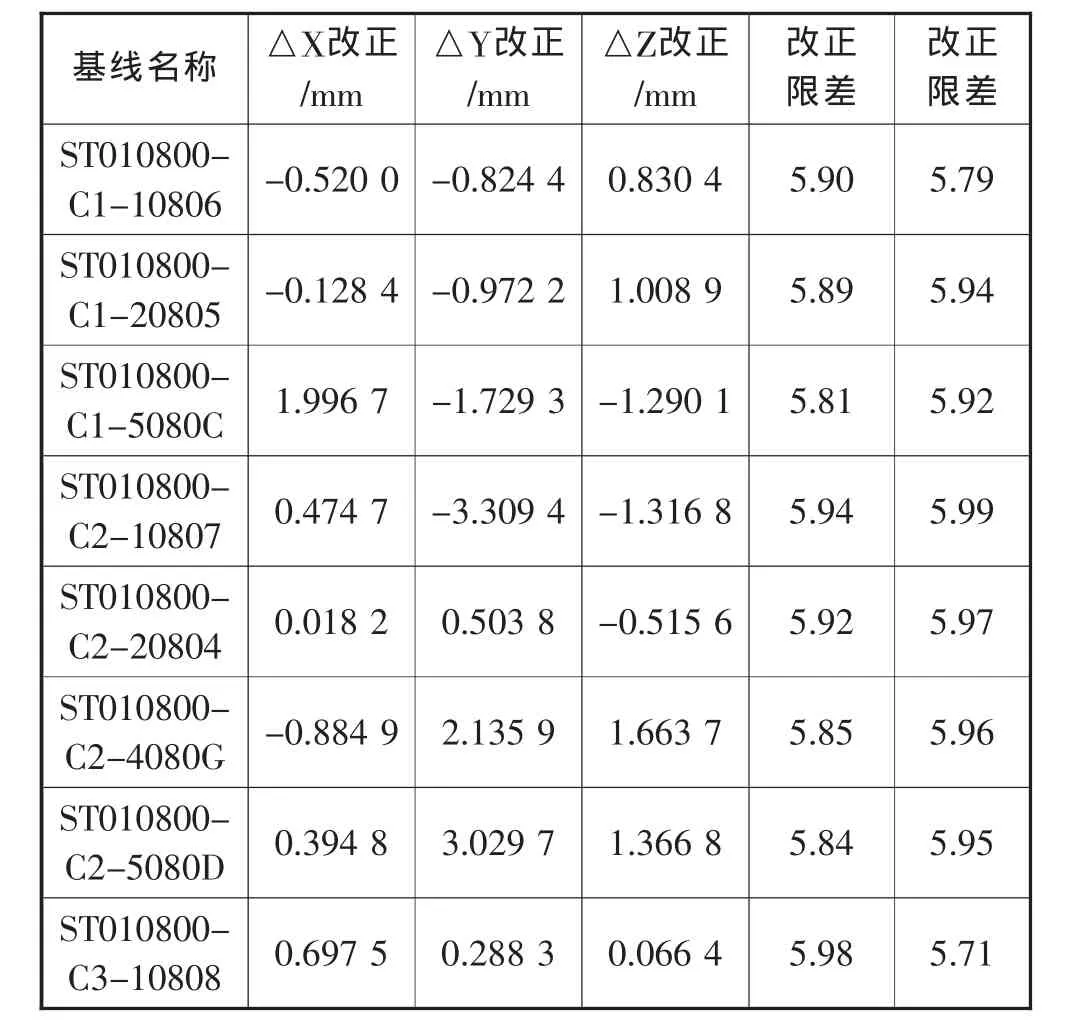
表4 三维约束平差结果
以ST01、ST02作为起算点解算,平差后坐标和点位精度见表5。
解算点位精度最大1.136 mm,小于规范和方案设计要求3 mm。为了对其进行外部数据检核,利用全站仪对基线 ST01-C1-1、ST01-C1-2、ST01-C1-3、ST01-C1-4、ST01-C1-5、ST02-C6-1、ST02-C6-2、ST02-C5-3、ST02-C3-4、ST02-C3-5进行符合,最大误差为1.1 mm,最小为0.5 mm,满足规范要求。

表5 监测点坐标点位精度
3.2.3 位移分析
为了监测大坝的稳定性,进行定期监测,时间间隔为2个月一次,表6为第二次监测变形量。
水平位移符号:X代表向上向下,Y代表向左向右岸。向下游为正,向左岸为正;反之为负。

表6 大坝变形量统计表
垂直位移符号:H向下为正,向上为负。
从上表可以看出,坝顶2排C1-1至C6-2变形量较大,超出了稳定范围3 mm,还在继续沉降,需加强监测。坝身和坝底2排C1-3至C3-5基本稳定,达到了稳定期。
4 结论
利用GPS对大坝进行测量是完全可行的,可以充分体现其操作简便、无需通视、劳动强度小的特点,可以大大提高工作效率。但同时在布点、观测时也应注意其避开高大建筑物、大面积水域、信号影响大的高压塔、发射塔等,以提高GPS数据观测的质量。
[1]岳建平,华锡生.GPS在大坝变形监测中的应用[J].大坝观测与土工测试,1996( 4),26-29.
[2]中华人民共和国水利部.土石坝安全监测技术规范[M].北京:中国水利水电出版社,2012.
