基于DSP的永磁同步电机伺服系统实验平台设计
2015-09-12李红丽贺永利巫亚强
李 喆,李红丽,贺永利,巫亚强
(西北机电工程研究所,陕西 咸阳 712099)
永磁同步电机(PMSM)具有定位精度和稳速精度高、动态响应快、运行稳定性好以及低噪声等优点,通过合理设计永磁磁路结构能获得较高的弱磁性能,提高电机的调速范围,在火炮随动系统、机器人驱动控制等高动态响应伺服控制领域得到广泛应用[1-2]。在系统设计过程中,高性能永磁同步电机伺服控制系统实验平台的设计关系整个控制系统性能的优劣。鉴于此,设计开发了一套基于数字信号处理器(DSP)的永磁同步电机伺服系统实验平台,在满足工程设计需求的同时,为相关专业研究生和新员工提供专业实践平台。
1 永磁交流伺服系统控制原理
1.1 PMSM工作原理
PMSM主要由定子、转子及测量转子位置的传感器构成。定子采用三相对称绕组结构,其轴线在空间彼此相差120°,当其对称三相绕组接通对称三相电源后,流过绕组的电流在定转子气隙中建立起旋转磁场,其转速为ns=,式中f为电源频率,p为定子极对数,磁场旋转方向取决于绕组电流的相序。由于电磁感应作用,闭合的转子永磁体内将产生感应电流,该电流产生的磁场和定子绕组产生的旋转磁场相互作用产生电磁转矩,从而使转子“跟着”定子磁场旋转起来,其转速n与ns同步。测量转子位置的传感器一般为旋转变压器或光电编码器。
1.2 PMSM数学模型
PMSM模型是一个多变量、非线性、强耦合系统,为实现动态过程的矢量控制,运用坐标变换理论,通过对电机定子三相静止坐标轴系的基本方程进行线性变换,实现电机数学模型的解耦,从而把交流电机中交流电流的控制变换成类似于直流电机中直流电流的控制,实现力矩控制,取得类似直流电机的高动态性能[3-5]。坐标变换如图1,其中(A、B、C)为定子三相静止坐标系,(α、β)为定子两相静止坐标系,(d、q)为转子两相旋转坐标系。
图1中us为定子电压,is为定子电流,ψs为定子磁链矢量,ψf为转子磁链矢量,θr为转子角位置,δ为电机转矩角。

图1 坐标变换关系
假设:①忽略电动机铁心的饱和;②不计电动机中的涡流和磁滞损耗;③转子无阻尼绕组。
PMSM在定子三相静止坐标系(A、B、C)中的数学模型表达如下:
PMSM在定子两相静止坐标系(α、β)中的数学模型表达如下:

PMSM在转子旋转坐标系(d、q)中的数学模型表达如下:
1.3 PMSM控制原理
永磁同步电机控制系统通过位置检测单元检测电机的转子位置信号,通过电流传感器检测电机三相电流,并通过电阻检测母线电压与给定转速,这些信号经过处理变为微处理器DSP能识别的信号,DSP将采集到的信息进行控制算法解算,由PWM单元输出驱动信号完成对电机的控制。原理框图如图2 所示[6]。
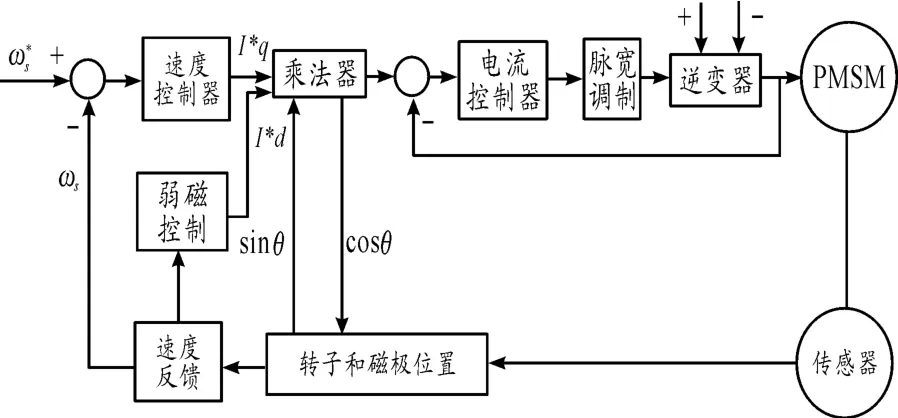
图2 PMSM控制原理框图
2 实验平台设计
2.1 平台组成
实验台架由转台、轴承、谐波减速器、制动器及防护罩组成,随动系统调试时需要安装方位和高低传感器[3]。动力电源由三相380 V稳压电源提供,控制电源的选择需要注意,调试随动系统时需要同时给方位驱动器和高低驱动器供电时,系统启动瞬间电流冲击至40 A左右。使用额定电压35 V、额定电流5 A直流稳压电源供电时,在系统启动瞬间容易掉电,需要用额定电压56 V、额定电流50 A的高性能可编程电源提供控制电源。控制对象永磁同步电机的选择可以根据项目需求选择,该平台电机功率为5.5 kW。
2.2 驱动控制器设计
驱动控制器主要由转子位置检测电路、电流检测及整流电路、滤波电路和IPM逆变电路组成,基本采用成熟技术[7]。系统采用旋转变压器AD2S1210作为转子位置信息的检测单元,通过正弦模拟励磁信号激发,反馈回来两组相位相差90°的正交正余弦信号,通过瞬时信号的检测来判断所在位置。电机定子三相电流的检测采用霍尔电流传感器(Honeywell公司的CSNE651),经过滤波、整流后由DSP内部集成的A/D转换模块获取电流反馈值。只需检测电机定子三相绕组中的两相即可,另外一相由三相平衡计算得出。IPM选用三菱智能功率模块PM150RL1A060,内部集成驱动电路,由DSP的ePWM外设输出的PWM波来控制输出。
驱动控制器的核心设计驱动控制板以TI公司新型DSP处理器TMS320F28335和逻辑时序控制CPLD为控制芯片[8-9]。新型F2833x浮点控制器与TI前代领先数字信号控制器相比,性能平均提高50%,并与定点C28x控制器软件兼容。DSP适用于电机控制的ePWM、ADC、eCAN、SPI和SCI等外设完成各自的功能与任务。控制板组成图如图3所示。
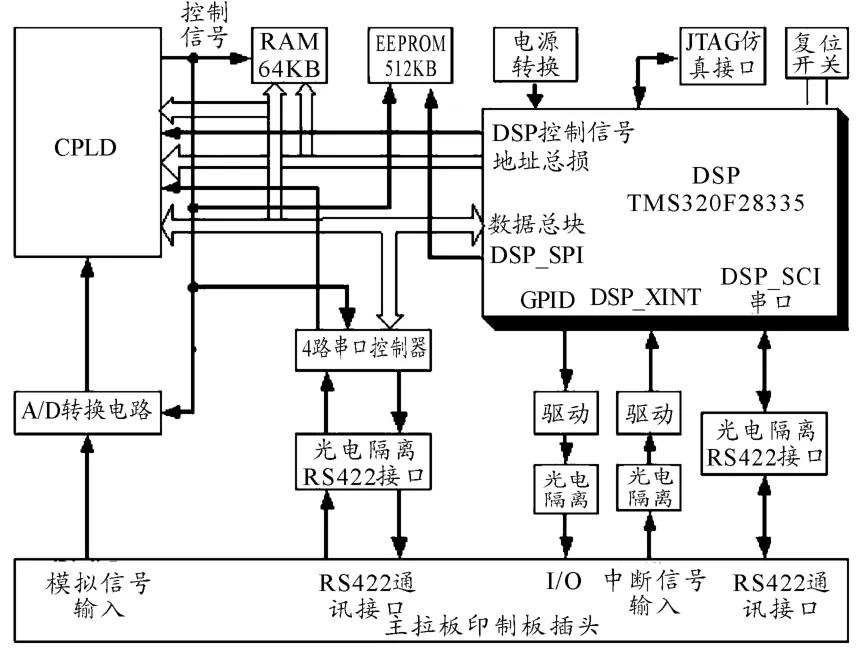
图3 控制板组成图
系统软件由DSP主程序和PWM中断程序组成,主要包括串口通信、CAN通信、控制算法、D/A输出等。
3 实验平台功能实现
作为工程研发设计实验平台,其功能不仅限于PMSM系统设计,更着力于相关领域预研项目和研究生课题项目的研究探索,在做好型号项目技术储备同时,便于新员工对整个随动系统有全面直观的认知,为此,着重从以下几方面培养:
1)PMSM仿真系统建模研究[10-11]。鉴于新员工对自动控制理论在PMSM控制系统中的应用和实现过程的理解很难做到理论与实践相结合,有必要先通过在Simulink环境中建立系统仿真模型,尽可能接近系统实际情况,通过对PMSM模块提供的定子电阻、转动惯量、摩擦系数和极对数等参数的实时调整,了解磁场定向控制原理及坐标变换理论的实现过程,进而对整个PMSM控制系统的实现过程有全面掌握。
仿真系统具有良好的开放性,学生通过PMSM仿真模型的搭建,将学习研究的各种以经典控制理论或现代控制理论为基础的各个环节的控制算法方便地移植到仿真系统中进行反复测试验证,直至仿真结果的合理性和可行性得到认可,再借助实验平台实现工程设计。
2)PID参数调整实验[12]。根据给定的系统设计指标确定系统模型,在Simulink环境下搭建系统方框图,根据系统带宽、稳态精度和稳定性之间的指标约束,寻找PI参数的最佳值,实现PID控制器设计。其中PID控制参数的选择采用凑试法,即通过系统闭环运行,观察系统的响应曲线,然后根据各调节参数对系统响应的大致影响,反复凑试参数,以达到满意的响应,从而确定PID调节参数。然后根据Matlab仿真结果,在实验平台上调整参数,直至系统品质满足要求。
3)驱动控制器设计。驱动控制器主要由转子位置检测电路、电流检测及整流电路、IPM逆变电路和驱动控制板组成。位置传感器可以选用旋转变压器或光电编码器,根据所需传感器的不同选择相对应的位置检测电路。驱动控制板设计从最初基于单片机MCU控制到数字控制器DSP TMS320F2407、TMS320F2812、TMS320F28335 系列,从 DSP+逻辑时序控制芯片CPLD组合到DSP+现场可编程门阵列FPGA组合,设计组合灵活多变。
软件设计主要在Code Composer Studio 3.3环境下用C语言编写,CPLD或FPGA程序设计则由选择的芯片厂商对应不同编译环境。
4 实验结果
系统控制对象永磁同步电机主要参数有∶额定功率5.5 kW,额定转矩18.6 N·m,额定转速3200 r/min,转动惯量82×10-4kg·m2,额定电压270V±10V,允许2倍过载。
图4是电机启动至高转速3500 r/min后反转至-3500 r/min后制动时形成图形,由图4可看出,系统电机转速由0~3500 r/min上升曲线、3500~-3500 r/min反转曲线和-3500~0 r/min制动曲线均平滑快速,基本无超调,无振荡。
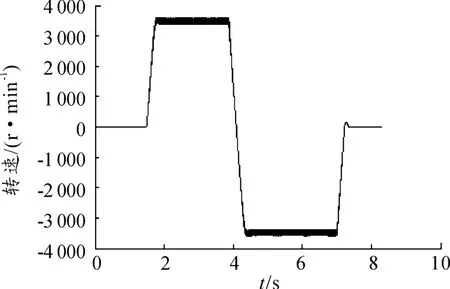
图4 转速3500~-3500 r/min图形
对应A相电流如图5,根据电流采样电路电阻匹配比例关系(图5中纵轴坐标为A相电流数字量,512对应113.3 A),估计A相电流值。图5中系统启动至高转速过程中A相电流迅速升至峰值,高转速平稳后A相电流稳定在固定范围内,B相电流变化过程相似。由转速曲线和相电流曲线趋势可知该驱动控制器有良好的性能。
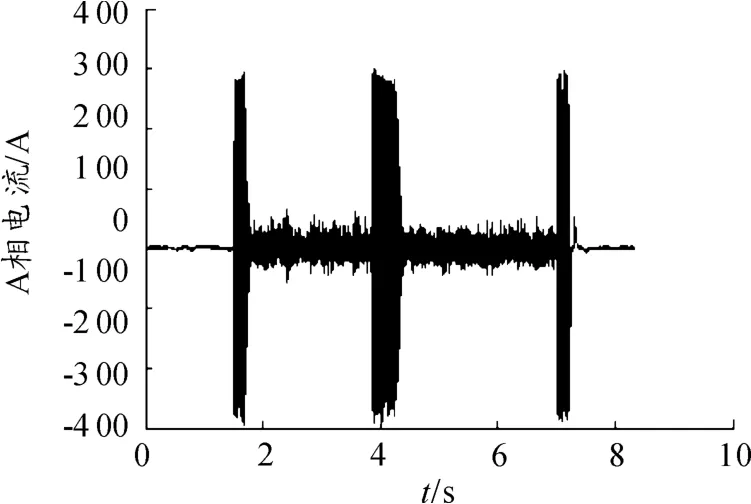
图5 转速3500~-3500 r/min对应A相电流图形
5 结论
高性能永磁同步电机实验平台可以由浅入深系统全面地提供电机转子位置检测、驱动控制器设计、DSP编程等多种类型的实验,具有综合性、多功能性、易于连线和调试等特点。该实验平台已在某预研项目随动系统设计开发过程中投入使用,取得了良好的效果。实验平台具有良好的可扩展性,对永磁同步电机控制系统相关领域的科研探索有很好的利用价值。
[1]王宏佳,杨明,牛里,等.永磁交流伺服系统速度控制器优化设计方法[J].电机与控制学报,2012(2):25-31.
[2]王鑫,李伟力,程树康.永磁同步电动机发展展望[J].微电机,2007(5):69-72.
[3]张莉松,胡祐德,徐立新.伺服系统原理与设计[M].北京:机械工业出版社,2008.
[4]舒志兵.交流伺服运动控制系统[M].北京:清华大学出版社,2006:2-11.
[5]纪洪明,富历新.永磁同步电机全数字伺服系统硬件设计[J].机械与电子,2005(7):24-27,29.
[6]赵仁峰,何伟,姜朋昌,等.永磁交流伺服系统实验台设计与研究[J].机械设计与制造,2010(1):23-24.
[7]刘日宝,王爱祥.基于DSP+FPGA的交流伺服驱动器设计[J].微特电机,2011(11):21-23,29.
[8]刘陵顺,高艳丽,张树团,等.TMS320F28335 DSP原理及开发编程[M].北京:北京航空航天大学出版社,2011.
[9]TI.TMS320F28xx和TMS320F28xxx DSCs的硬件设计指南[Z].2001.
[10]徐东,刘敬猛.永磁同步电机伺服仿真系统关键技术研究[J].实验技术与管理,2012(4):321-324,29.
[11]薛定宇.控制系统计算机辅助设计:Matlab语言与应用[M].2版.北京:清华大学出版社,2006.
[12]崔伟成,孟凡磊,刘林密.导弹发射装置随动系统实验平台构建[J].实验技术与管理,2011(12):66-68,28.
[13]李海侠.交流伺服系统无速度传感器模糊控制策略研究[J].机床与液压,2013(1):31-34.