叶栅式反推装置的受载与传力
2015-09-12张少军王汉平何江军孙利兵
张少军,王汉平,何江军,孙利兵
(1.北京理工大学宇航学院,北京 100081;2.中国航空工业集团沈阳发动机设计研究所,沈阳 110015)
随着我国大型飞机的巨大发展,对大涵道比涡扇发动机的需求愈来愈大。有效的减速装置是大型飞机的必备功能[1]。目前,几乎所有先进的大型飞机都采用发动机反推力装置来进行减速[6],其中,叶栅式反推器是应用较为广泛的一种反推装置,虽然这种反推装置会增重和增加发动机设计复杂性,但还是以其独有的集成度高、可靠性高、对不同的发动机工况适应性强等优点,在国外得到了较广泛的应用[7]。相对于国外比较成熟的研究现状,国内目前对反推力装置研究基本处于空白状态[2]。本文以叶栅式反推器为研究对象,在对模型进行简化的基础上完成了刚体建模,消除了过约束,简化了分布载荷,仿真得到机构关键部件在任意行程下的受力情况,分析可能出现的机构设计的不合理之处,得到了有工程参考价值的结果。
1 叶栅式反推装置结构分析与运动原理
图1为叶栅式反推力装置结构及流路示意图。它由作动系统、扭矩盒、阻流门、拉杆、转接件及起固定框架作用的上导轨梁、下导轨梁、扭矩盒等组成。正推力状态下、气流从外涵喷管喷出,产生正推力。反推力状态时,因移动外罩后移,露出叶栅,阻流门 挡住发动机外涵道,使外喊道气流转入导流叶栅中,并沿叶栅所的方向喷出,从而达到产生反推力的目的。
如图1所示,叶栅式反推力装置打开过程机构的运动为:作用筒伸展驱动移动外罩向后平移,阻流门2上的A点跟随移动外罩向后平移,阻流门通过转接件3带动拉杆4在以D为圆心的圆周上运动,从某特定位置开始,阻流门在拉杆和转接件的作用下,在移动外罩向后平移的同时绕A点转动,达到图1(b)所示反推状态。移动外罩为平动,而阻流门的运动为随移动外罩平动及绕平动的A点转动。通过更改作用筒的伸展速度,可改变移动外罩及阻流门的平移速度,而改变D点位置及转接件结构、拉杆长度等参数可改变阻流门开始转动的位置及转动速度。反推装置关闭过程与打开工程机构运动相反[3]。
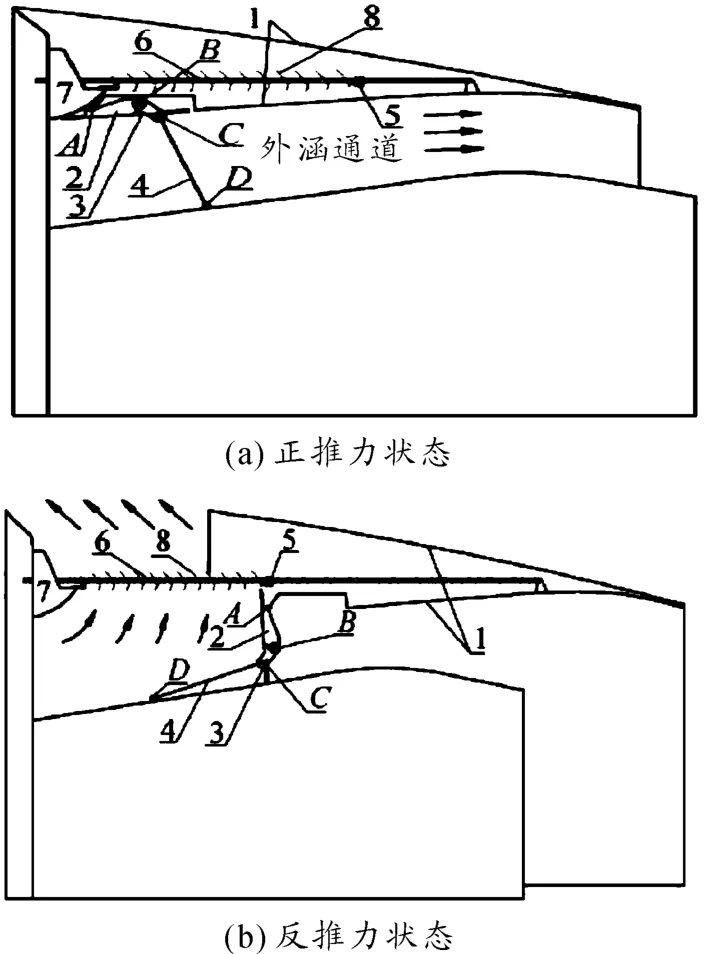
图1 叶栅式反推力装置结构及流路示意图
2 多刚体模型的建立
叶栅式反推装置分为对称的两部分,分别通过预设的吊点与飞机的机翼相连,由于具有对称性[4],选取机构的一半作为研究对象,但零件仍多达上千个,如何正确的简化将是建模的前提[5]。通过对结构分析,确立了反推装置机构的拓扑关系。为了减少模型规模,将没有相对运动的零件合并成一个part并重新命名,通过这样的简化和合并操作之后,整个反推装置运动机构的运动构件数量大大减少。
添加约束时考虑到本模型需要添加的约束和marker点众多,采用绝对坐标来表述marker和约束工作量巨大且很难保证精度,所以将整个反推装置模型模化为一种树状结构,本模型定义全局坐标系的全局作为基准点,然后计算出外涵内壁和拉杆之间的铰链点在基准点坐标系下所处的位置,使用LOC_RELATIVE_TO函数和ORI_RELATIVE_TO函数来完成marker的位置和方向的设置。完成以上5个marker点的定义之后,再分别以这5个点向前推进直至全部marker点建立完毕。marker点添加完成后可在其基础上添加约束,一般定义完一组marker后就向marker各自所属的part间添加约束。为保证存在约束关系的两part之间约束的合理,一般这两part的marker借助LOC_RELATIVE_TO和ORI_RELATIVE_TO函数来进行定义,确保位置和方向的一致性,约束情况如图2所示。
需要指出的是为了减少模型仿真的计算量,应尽量避免添加实体对实体的接触约束,在本模型中,为了防止阻流门在拉杆的推力下向后移动,在每个阻流门与门后结构之间添加了接触(共10处)。同样,为了保证阻流门和拉杆的运动轨迹,在每个转接件与对应阻流门之间添加了接触(每个转接件2处接触,共10处)。

图2 理想约束示意图
反推机构整体是一个高度复杂的空间机构,由图2可知机构不仅形成了封闭的回路,而且是环中套环,如果按图2中实际约束去建模,产生了多达70个过约束。然后ADAMS对过约束进行了自动剔除,此过程有很多不合理的现象产生,最终导致模型不能按设计的运动方式运动或机构承载和传力发生明显差异,所以必须人工进行过约束处理。图3为最终的约束方式。从图2和图3对比可知,除了固定副之外基本全做了变化,其中最为关键的改动有两处。
1)对液压装置的处理。在此把液压装置拆成7部分,分别为液压盖,3个液压筒,3个液压杆。在液压盖与3个液压筒之间添加垂直约束,在液压筒与对应的液压杆之间添加移动副,在液压杆与移动外罩之间添加球铰。
2)对导轨处约束的处理。经过不断的尝试,最终发现任何一种约束都无法满足要求,最终选择在此处消除一切约束,而用接触代替。
经过以上处理之后,成功的消除了过约束,机构运行平稳,受载也变得均匀合理。
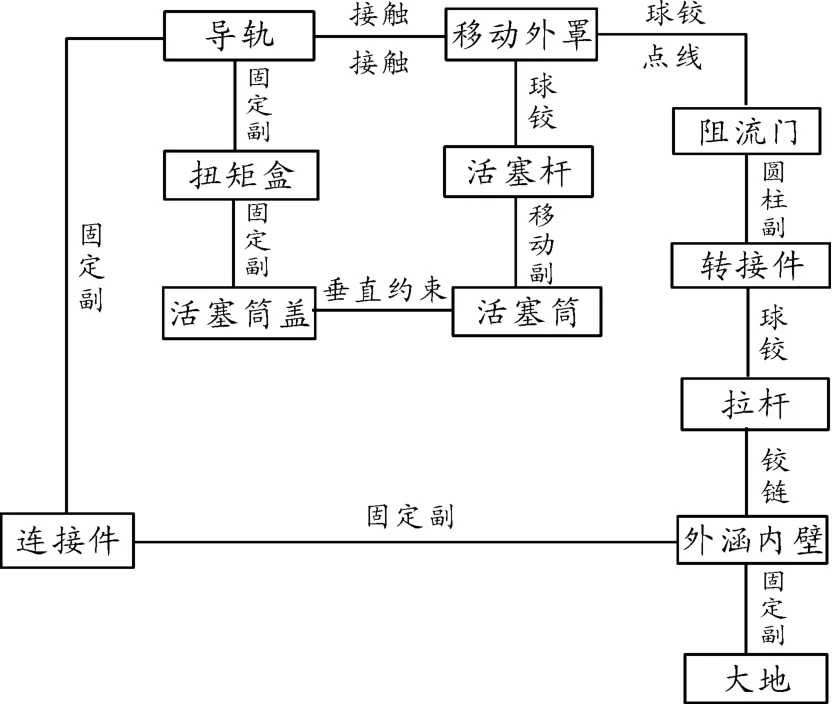
图3 消除过约束后的约束示意图
3 载荷处理与加载
3.1 阻流门载荷的处理
根据刚体载荷简化理论,在进行载荷处理时,主要思路是用自编程序代码将作用于阻流门上的分布气动载荷等效为针对某点的集中载荷,然后再在ADAMS环境中对等效集中载荷进行插值处理以获取任意行程下阻流门的受载特性。
需要加载的5个阻流门中,中间3个阻流门形状一样,只需要简化一次即可,通过测量分析,最终把阻流门划分为矩形和梯形两部分,简化中心选为下边缘中心,如图4所示。相比中间3个阻流门,阻流门1和阻流门5的形状更特殊,需要多划分出了一个三角形部分,简化中心仍为下边缘中心。由于阻流门1和5的相似性,只给出阻流门1的简化图,如图5所示。为了保证精度,选取1 mm为步长进行编程,程序流程图如图6所示。
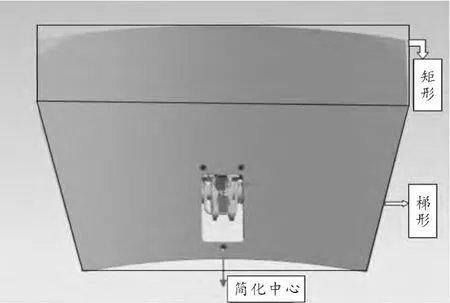
图4 中间三个阻流门形状简化示意图
3.2 零件承受燃气流等效GFORCE的添加
机构运动过程中每个零件所处位置不同,我们借助移动外罩行程变化规律就可确定其所处的位置,然后根据零件的位置在典型状态空间中进行插值计算,从而获取任意行程下气动载荷等效集中力。气动载荷在ADAMS中的添加和处理可以借助MSC.ADAMS软件强大的二次开发能力予以完成,首先是在反推装置多刚体动力学模型中添加相应的GForce来模拟气动流的载荷,该GForce载荷需要对每一个阻流门6个方向的受载按状态空间进行插值运算来获取;其次是采用ADAMS提供的GFOSUB来开发GForce解算程序,完成载荷的实际加载。GFOSUB的编写采用了C语言接口,其程序的流程图如图7所示。
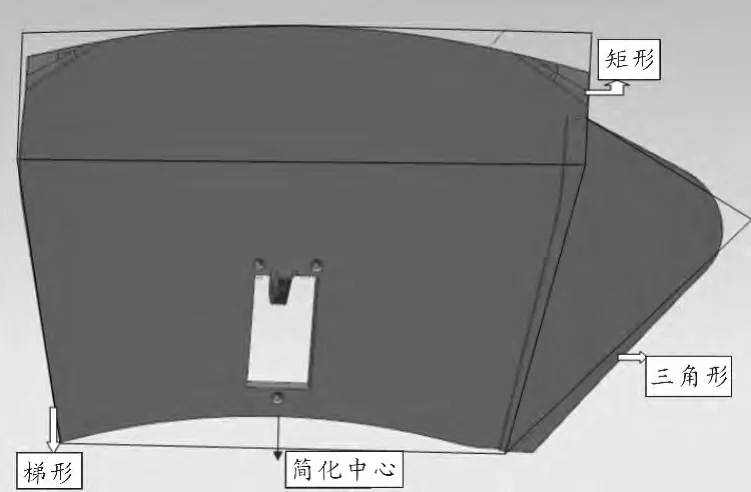
图5 其余阻流门形状简化示意图

图6 阻流门载荷处理程序流程

图7 GForce程序流程
4 结果分析
添加位移控制规律 -step(time,0.0,0.0,0.41,0.235*sin(2*pi*time)+0.235),使移动外罩获得一个余弦运动规律。使用GSTIFF求解器,进行5 s的仿真,1 s为一个周期,机构由初始装配状态过渡到打开状态的循环采用了step函数以提高数值计算的稳定性。所提供数据均采用无量纲化处理。
4.1 拉杆载荷特性分析
从整个趋势看,拉杆1和拉杆5的所受合力和合力矩要比中间3个拉杆的受载大。这样符合实际情况,因为阻流门1和阻流门5的面积要大于中间3个阻流门,所受的气动载荷也要大,导致对应的拉杆受载也大,符合预期。

图8 各拉杆受载合力(数据以作处理)
4.2 驱动力分析
按照实际情况,应该在3个液压筒处添加驱动,但按照实际情况添加之后发现,3个驱动会出现不同步现象,导致3个驱动力不相同。最终只选着在中间的液压筒处添加一处驱动,最后的驱动力除以3即为每个驱动的实际驱动力。
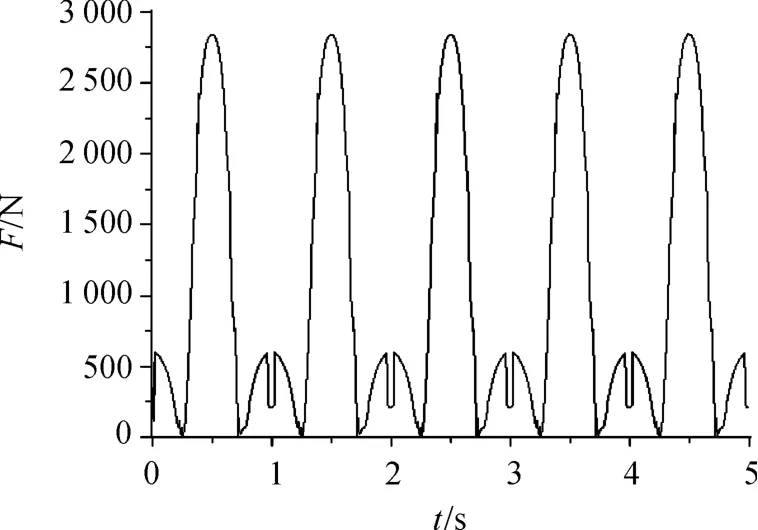
图9 驱动力(数据以作处理)
5 结束语
本文在叶栅式反推装置三维模型的基础上,确定了构件之间的约束位置和约束形式,添加约束并消除了过约束。之后,通过修改扭簧及各种接触的参数,使模型运动达到合理的状态。在完成以上建模仿真的基础上,采用自编程序代码将阻流门上的分布载荷等效处理成等效的节点集中力载荷,按照线性插值算法编写了能与ADAMS进行有效数据交互的载荷计算和加载子程序,完成了反推装置多刚体动力学建模。同时,进行了仿真运算,考查反推装置工作过程的受载和传力,并对关键零件的载荷特性进行了简要分析。此次的仿真结果可作为反推设计人员,进行实物试验之前,对试验中可能出现的问题作出预测。另外,本次仿真将有助于设计人员,找出反推装置中存在的不足,为反推装置的改进提供理论支撑。
[1]靳宝林,邢伟红,刘殿春.飞机/发动机推进系统反推力装置[J].航空发动机,2004,30(4):48-52.
[2]靳宝林,朱明俊.航空发动机推力矢量技术发展趋势分析[J].航空发动机,1997(1):44-49.
[3]谢叶平,王强,邵万仁,等.叶栅式反推装置阻流门运动规律对气动性能的影响[J].航空动力学报,2010(6):1297-1302.
[4]杜刚,金捷.大型运输机发动机反推力装置[C]//中国航空学会2007年学术年会.出版地不详:[出版社不详].
[5]邵万仁,叶留增,沈锡钢,等.反推力装置关键技术及技术途径初步探讨[C]//中国航空学会2007年学术年会.出版地不详:[出版社不详].
[6]沙江,徐惊雷.发动机反推力装置及其研究进展[C]//中国航空学会2007年学术年会.出版地不详:[出版社不详].
[7]张德志.中国大型飞机发动机研制中的关键技术[J].天津:中国民航大学学报,2008(10):30-33.