某高机动雷达平台骨架优化设计
2015-09-11季汉忠
季汉忠
(南京电子技术研究所, 江苏 南京 210039)
某高机动雷达平台骨架优化设计
季汉忠
(南京电子技术研究所, 江苏 南京 210039)
高机动雷达平台承载天线座及天线阵面等关键设备,其刚强度优化设计至关重要,直接影响雷达的使用安全性和测量精度。文中对某雷达平台骨架进行了优化设计,采用有限元分析手段对骨架结构进行了仿真分析,考察了应力及变形指标,针对局部应力集中提出了优化改进措施。采用应力测试方法对骨架的应力进行了测试评估,结果与有限元分析相符。
高机动雷达;平台骨架;有限元仿真;应变测试
引 言
在车载高机动雷达结构设计时,平台骨架的仿真优化设计极为重要[1]。平台骨架底部与车大梁相连,顶部安装几乎所有设备,如天线阵面、天线座、阵面倒竖机构、冷却源、电源、配电、伺服控制及电站等均集中于平台骨架之上。而雷达配置有调平机构与平台骨架相连,可以实现雷达平台的快速调平[2],平台骨架与调平机构的连接处是主要的受力部位。在平台骨架设计时需要考虑关键部位的应力指标。
另外,如果平台骨架的变形超过许可值,会给雷达的指向带来误差,该误差通过动态水平仪等难以修正。因此,进行强度设计以减小平台骨架变形是平台优化设计的另一个考虑因素。平台骨架作为车载高机动雷达的主要承力骨架[3],是保证雷达整机结构刚强度的关键。
从载车高机动性方面考虑,整车重量越小,机动性能越高,对运输限制及载车的承载限制的适应性越好。因此,在结构设计的同时,采用有限元仿真优化可以优化平台骨架重量。
本文从某高机动雷达平台骨架的结构设计出发,采用有限元仿真分析手段对结构性能进行了优化,对平台骨架的应力状态进行了分析,并采用应变测试方法进行实物验证测试,为后续平台优化设计提供参考。
1 平台骨架结构设计
为满足雷达的使用要求并便于设备的维修,雷达设备均安装在平台骨架上,平台骨架再与载车采用旋锁固定,形成一个运输单元。雷达平台骨架的结构示意如图1所示。
平台骨架外形尺寸为9 300 mm × 1 850 mm × 350 mm。图中箭头所示为车头方向,以车前进方向为参考,4个支撑腿分别标示为左前、左后、右前和右后。平台骨架从前端往后依次安装操作方舱、天线座及天线阵面、馈源、油源和电站等。
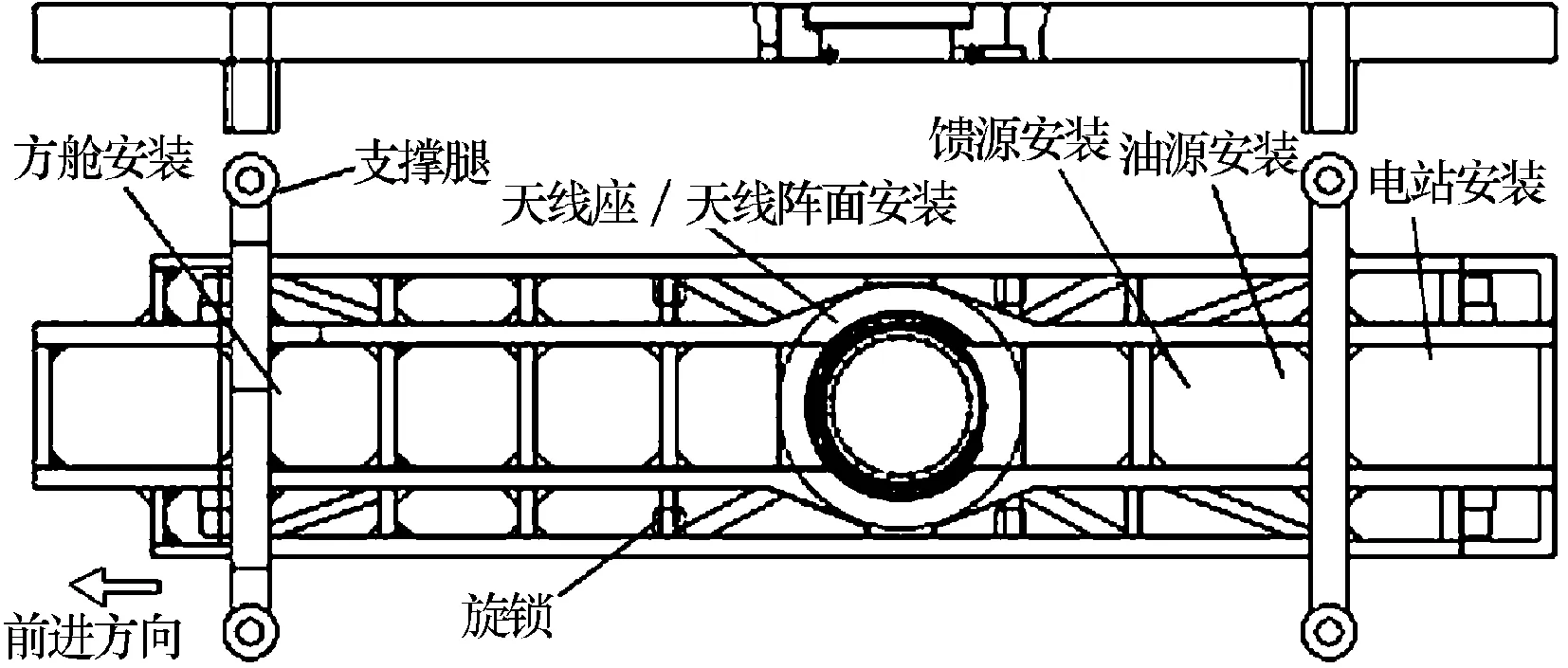
图1 平台骨架结构
天线座及天线阵面总重4.1 t,集中安装于平台中部的圆环法兰面上,而平台上装设备总重16.6 t,在支撑腿支撑后载荷集中作用在支撑腿上,因此圆环法兰面和支撑腿与平台骨架的连接部位是重点加强部位。
2 平台骨架仿真优化
由于雷达对平台骨架有较高的刚强度要求,因此必须对平台进行力学分析和合理设计。图2为初始设计的平台有限元模型。其中,平台骨架的各个C型梁采用梁单元建立,支撑腿简化处理成刚性梁,天线座连接法兰面采用实体单元建模。网格划分后节点数为189 506个,自重3.13 t。
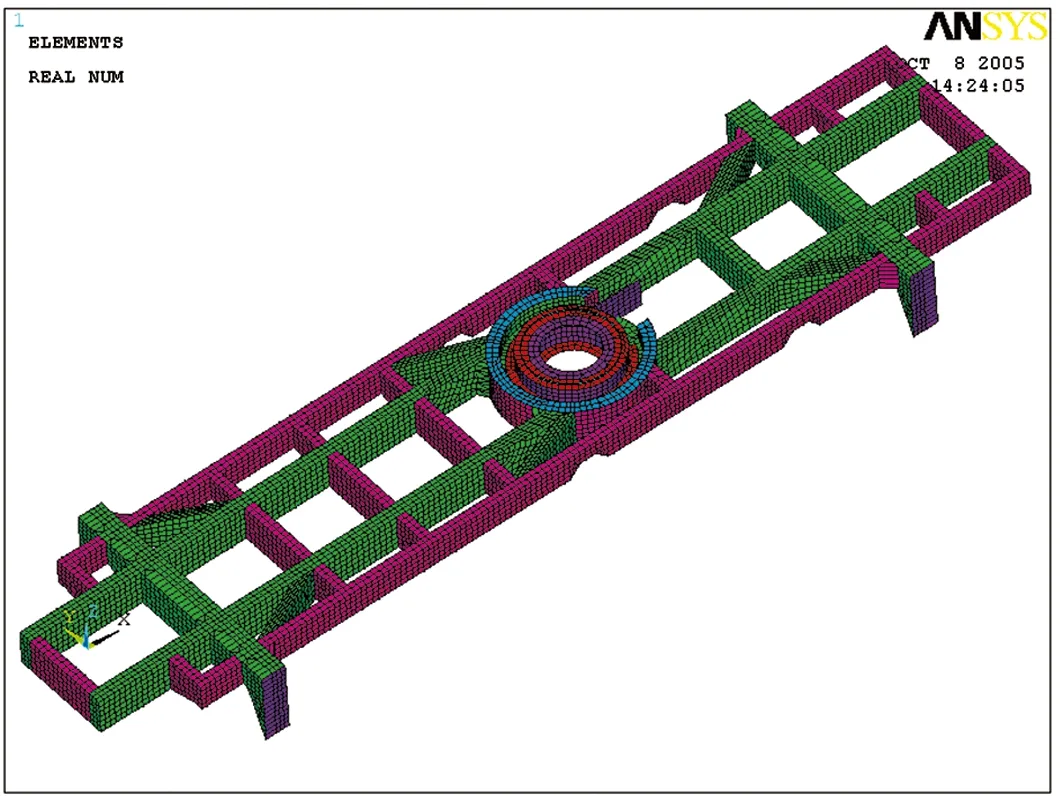
图2 平台骨架的有限元模型
平台在正常调平情况下,4条支撑腿均匀支撑在地面上,定义该工况为弯曲工况,计算时约束4条支撑腿的3个平动自由度。在恶劣情况下,仅有3条支撑腿支撑,另一条悬空,平台可能发生扭转,定义该工况为扭转工况,计算时约束3条支撑腿的3个平动自由度,释放另一条支撑腿的所有自由度。所有载荷以集中质量点的形式施加在平台上。扭转工况时的计算结果如图3所示。
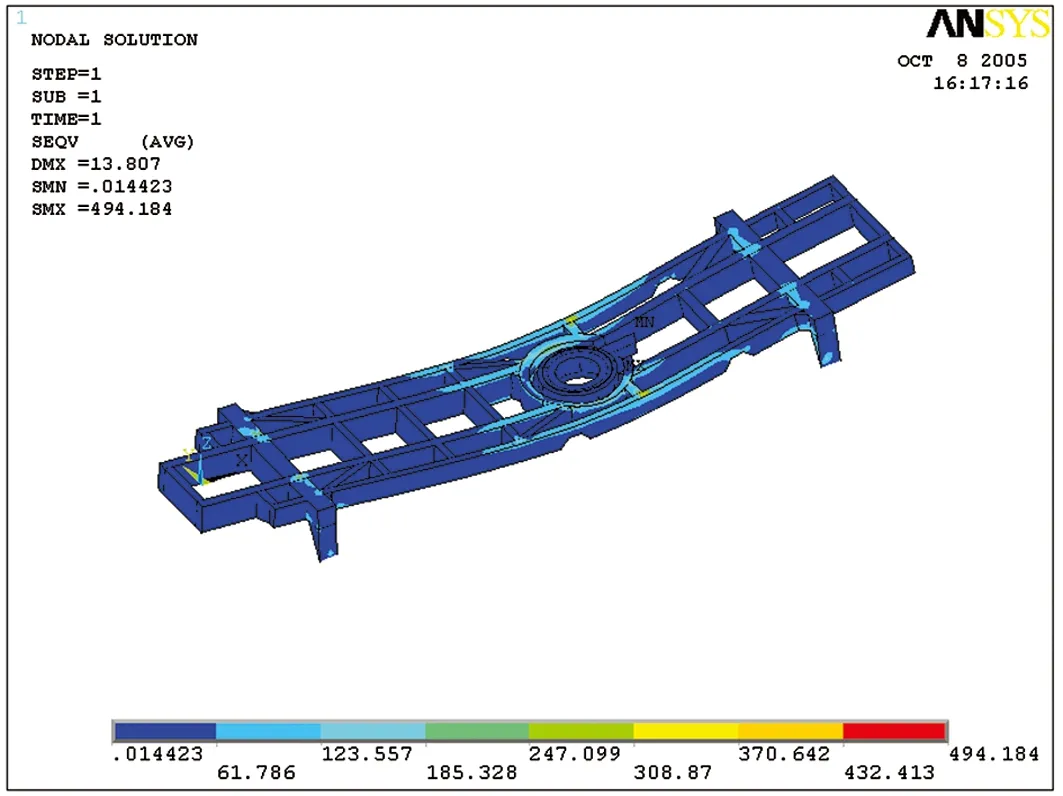
图3 扭转工况时平台应力云图
从结果来看,最大应力494 MPa,较大应力点发生在平台中部圆环与斜梁连接处、支撑腿与平台的连接处以及边梁的缺口处。由于应力较大,需要对上述位置进行优化加强。
采用拓扑优化结合经验校核的方法进行迭代计算,对平台进行了如下的改进:1)去除边梁的缺口;2)边梁及中间主梁截面高度由原来的250 mm增加到350 mm;3)圆环与边梁及横梁之间增加短梁连接;4)增大圆环梁的横截面;5)优化受力较小的梁的截面尺寸,优化重量,最终平台重2.67 t。计算结果如图4所示。

图4 平台上表面的应力分布
综合各种工况,在扭转工况时平台骨架的受力情况最为恶劣,应力云图如图4所示,最大应力290 MPa,最大变形62 mm,应力分布状况较均匀。而在弯曲工况时,平台最大应力在150 MPa以下,最大变形8.9 mm,符合设计要求。由于平台设计采用瑞典SSAB钢板公司DOMEX700特种钢,其许用应力达700 MPa以上,因此平台是安全的。
值得说明的是,一般情况下,在进行仿真优化时需要考虑外界载荷,如风载、雪载等[4]。本文为了与实际测试结果进行对比,图4的计算结果未增加外界载荷。
3 平台骨架应力测试
经平台骨架结构设计的有限元力学分析可知,在最恶劣工况下平台骨架的最大应力和最大变形符合使用要求。最恶劣工况发生在平台调平时,由于调平千斤顶举升工作的不同步,导致形成3点支撑的极端情况,此时平台的应力值最大。应力测试的目的就是测试出最大应力值,并与计算值作比较验证。
根据图4的有限元分析结果,确定最大主应力出现的区域,从而确定测试点的数量和布局。从仿真结果来看,应力较为集中的点主要出现在天线座圆环法兰面的上下表面、右前腿及左后腿的上下平面。因此,应力测试点布置时,在上述位置相对集中。整个平台24个测点即可反映平台骨架的应力状态,重点考察的几个关键点布置见图5。其中,圆环处测点编号为1~6,调平腿处测点编号为7~10。
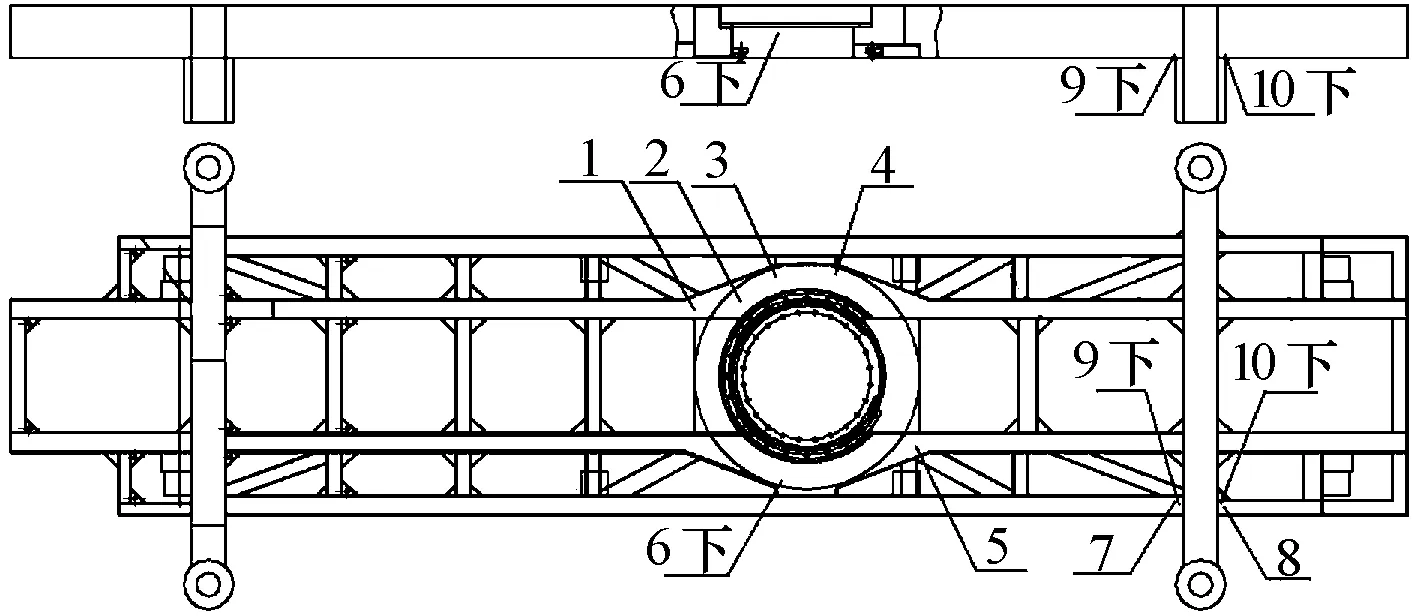
图5 应变片布置图
进行应力测试实验时,载荷的施加是根据设备上装的质量和质心加装模拟载荷,连同汽车底盘支撑起平台骨架使车轮全部离地。在此情况下测试出最大主应力和最大变形,其中最大变形出现在悬空支撑腿的位置。应力测试结果如表1所示。
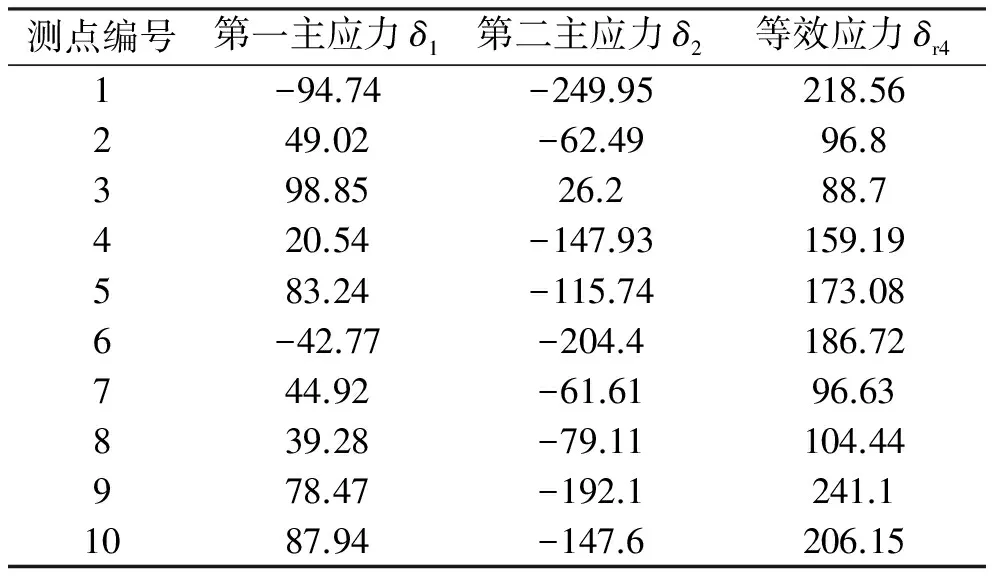
表1 应力测试结果 MPa
测试结果显示,最大应力出现在1、6及10号测试点附近,为支撑腿与平台骨架大梁连接点以及天线座安装法兰面与平台骨架连接点,与计算结果相符。
4 结束语
平台骨架属于大型结构件,是车载雷达中非常关键的结构部件,是保证电子设备正常工作的基础。采用有限元仿真分析手段对平台骨架结构进行优化,在满足使用要求的情况下,优化了结构形式和梁参数,并获得了应力和应变分布,并通过实物应力测试验证了仿真优化的有效性,为后续平台骨架的优化设计提供参考。
[1] 孙戎. 某雷达承载平台的有限元分析[J]. 电子机械工程, 2004, 20(1): 30-32.
[2] 周勤. 雷达天线平台高精度调平装置的结构设计分析[J]. 电子机械工程, 1999(5): 61-63.
[3] 沈明成, 严战非, 宋君. 车载雷达中平台骨架的制造工艺[J]. 电子机械工程, 2011, 27(3): 44-46.
[4] 杨红军, 李刚炎. 车载雷达天线平台的负载特性及风载稳定性研究[J]. 机械制造, 2008, 46(2): 24-27.
季汉忠(1961-),男,工程师,主要从事高机动车载相控阵雷达结构总体设计工作。
Optimization Design of Platform Framework for a Highly Mobile Radar
JI Han-zhong
(NanjingResearchInstituteofElectronicsTechnology,Nanjing210039,China)
The platform framework of highly mobile radar supports key equipment such as antenna pedestal and antenna array, its stiffness and strength optimization is very important and directly influences the use safety and measuring accuracy of radar. In this paper, optimization design for the platform framework of a highly mobile radar is carried out. Finite element method is used for simulation analysis of framework structure. The stress and deformation are evaluated, and optimizations are proposed for partial stress concentration. Then a stress test platform is applied to test the actual stress of the physical platform framework, the results agree with simulation.
highly mobile radar; platform framework; finite element analysis; strain test
2015-07-14
TN823+.27
A
1008-5300(2015)06-0033-02