水平旋转式搂草机曲面轨迹控制导向槽从动件运动规律设计
2015-09-09李妥刘志刚易栓等
李妥 刘志刚 易栓等

摘要:针对水平旋转式搂草机曲面轨迹控制导向槽从动件复杂的运动特征,采用理论结合实际的方法,对从动件的运动规律进行设计。通过对从动件运动轨迹曲线类型的探讨,推导出了从动件运动规律的轨迹方程;利用MATLAB软件绘制从动件运动规律线图;对样机进行试制,并进行田间试验。结果表明,研制的水平旋转式搂草机样机搂得的草条均匀整齐、翻转合格率为93.5%、漏搂率为2.2%,作业质量满足行业标准要求。
关键词:曲面轨迹控制导向槽;轨迹方程;函数图像;ADAMS;运动仿真
中图分类号:S225.8 文献标识码:A 文章编号:0439-8114(2015)14-3522-04
DOI:10.14088/j.cnki.issn0439-8114.2015.14.049
Design on Parts of Motion Law of Follower Surface Trajectory Control Guide Groove of Horizontal Rotary Rake
LI Tuo1,LIU Zhi-gang1,YI Shuan2,HU Zhi-yong1,PEI Cheng-hui1
(1.Inner Mongolia University of Technology,Hohhot 010051,China;
2.Product Quality Supervision Center of Zhenjiang City,Zhenjiang 212132, Jiangsu, China)
Abstract: Because the horizontal rotary rake surface trajectory control driven guide groove motion character was complex, adopting the method of combining theory with practice, the law of motion of follower was designed. After deducing the locus equation of the motion law of the follower, the motion law of follower line graph with MATLAB was draw out. The field experiments results showed that the grass strip hugged by horizontal rotary rake prototype was uniform, the turnover rate of qualified was 93.5%,the rate of leakage around was 2.2%. The work met the requirements of industry standards. It proved that the law of motion can meet the requirement of functional requirements.
Key words: curved trajectory control guide groove; the trajectory equation; the image function; ADAms; motion simulation
随着我国牧草种植范围的不断扩大,对牧草机械的需求越来越迫切,尤其是对搂草机的需求极大。水平旋转式搂草机的作业质量好、功能先进,因此市场的占有率较高。但是由于我国对搂草机的研究起步较晚,自主研发的品牌较少,所以国内使用的水平旋转式搂草机主要依赖进口[1-3]。为了赢得国内市场,我国相关的研究院(所)和生产企业都加快了水平旋转式搂草机的研制。
曲面轨迹控制导向槽是水平旋转式搂草机的关键零件,它的工作质量是影响草条整齐蓬松程度、翻晒均匀性、疏松度、漏搂率和花叶损失率的关键因素。对曲面轨迹控制导向槽进行研究和设计,是解决搂草机整机研发这一难题最有效的途径。本研究推导出曲面轨迹控制导向槽从动件的轨迹方程,为曲面轨迹控制导向槽的设计提供了理论基础,加快了国产水平旋转式搂草机投放市场的速度。
1 搂集装置的搂集原理
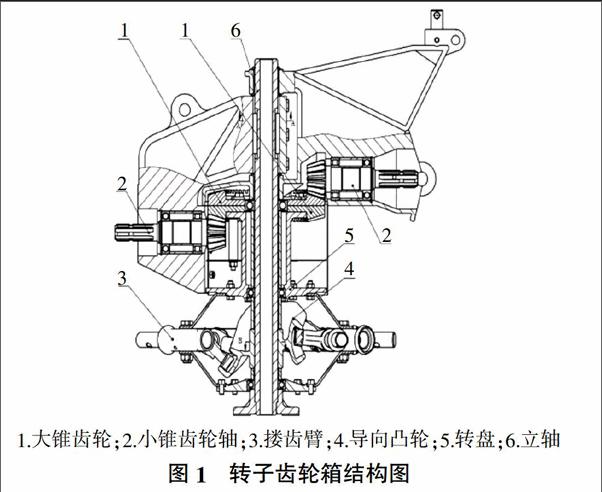
转子齿轮箱是搂集装置的关键部件结构如图1所示。动力由拖拉机输出后经过减速装置传递到转子齿轮箱的小锥齿轮轴2。由于大锥齿轮1与转盘5连接,转盘5又与搂齿臂3连接,所以动力由小齿轮轴传递到搂齿臂上,最终搂齿臂沿着曲面轨迹控制导向槽旋转,完成搂草放草的动作。
2 凸轮从动件运动轨迹方程推导
2.1 从动件运动轨迹曲线类型及运动规律的选择
假设转盘固定不动,则曲面轨迹控制导向槽绕中心轴匀速转动。根据搂草机实际工作情况可知转动角的变化规律是“变大—停—变小—停”,对应为推程阶段、远休止阶段、回程阶段、近休止阶段。相应的曲面轨迹控制导向槽转动的角度就是推程角、远休止角、回程角、近休止角。
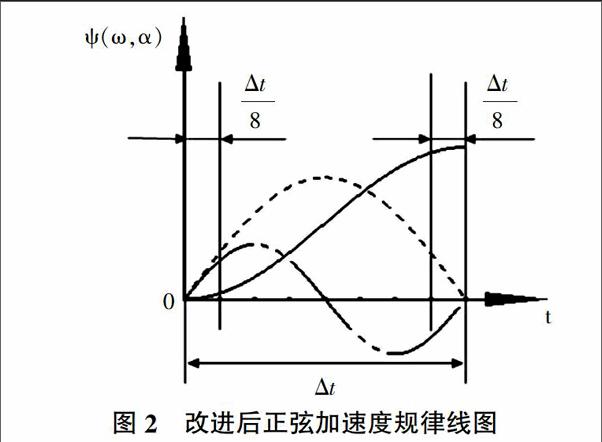
由上面的分析可知,从动件的运动规律符合双停留曲线所描绘的运动规律。设计运动规律时,要保证运动平稳,避免刚性冲击和柔性冲击。相同的角位移可以避免刚性冲击,相同的角速度和角加速度可以避免柔性冲击,反映到运动参数上就是要保证各相邻的运动阶段边界运动条件相同,以保证其平稳过渡到下一个运动阶段。基于以上要求,改进的正弦加速度规律以满足本研究中从动件运动规律的设计要求,改进后从动件推程阶段运动规律如图2所示。图中双点划线表示推程阶段从动件角加速度曲线,虚线表示推程阶段角速度曲线,实线表示推程阶段角位移曲线。
2.2 从动件运动规律的计算
2.2.1 运动参数无因次化 为了选择最理想的运动规律,将从动件的实际角位移、时间、角速度、角加速度无因次化,用无量纲的形式表达出来,对应得到无因次量?鬃、T、?赘、A。
进而得到推程阶段无因次化参数的边界条件为:
T=0时,?鬃=0,?赘=0,A=0T=1时,?鬃=1,?赘=0,A=0 (2)
由式(1)和(2)可以推导出实际参数与无因次参数之间的函数关系,即:
2.2.2 推程阶段的运动曲线方程 通过对正弦加速度规律进行分析可知,整个推程过程中角加速度是由三段组成的。设计要求无刚性冲击和柔性冲击,边界条件为:
式中,A1、A2和A3分别表示加速度三段中每一段的无因次角加速度。
现将三段都用正弦函数表示,并将式(4)中的边界条件带入,可得推程阶段的无因次化的角加速度方程[4-6]:
(3),可得推程阶段的实际角加速度函数方程:
根据实际的工作要求,升程阶段大约占运动周期的1/5,搂草机完成一个完整的运动周期为0.5 s,那么Δt就是0.1 s。搂齿臂相对于转盘的实际转动角度范围是[0,π/2],故Δ?鬃取π/2。查水平旋转式搂草(摊晒)机的技术特征表[7]可知,此结构的搂草机转盘的转速取120 r/min,将Δ?鬃=π/2,Δt=0.1 s代入式(6)可得搂齿臂相对于转盘运动的角加速度轨迹方程为:
对式(7)求积分可得推程阶段从动件实际角速度轨迹方程:
对式(8)求积分可得推程阶段从动件实际角位移轨迹方程:
2.2.5 近休止阶段的运动曲线方程 根据前面的分析可知,回程阶段最后时刻从动件的角位移、角速度和角加速度都是零,即从动件回到起始位置,近休止阶段就是从动件保持在起始位置不动。故当0.4 s≤t≤0.5 s时,?鬃8=?棕8=?琢8=0。
3 从动件运动规律线图
根据推导出的从动件运动轨迹方程,在MATLAB中绘制从动件的运动规律线图,结果如图3~图5所示,分别为从动件的角位移曲线图像、角速度曲线图像和角加速度曲线图像。
4 曲面轨迹控制导向槽的三维造型和从动件运动轨迹仿真
4.1 曲面轨迹控制导向槽的三维造型
根据曲面轨迹控制导向槽从动件的运动曲线方程,对曲面轨迹控制导向槽进行三维建模,结果如图6所示。
对搂齿臂、转盘等其他零件进行三维造型装配,装配结果如图7所示。
4.2 从动件运动规律线图绘制
将装配后的模型导入ADAMS中[8],通过仿真计算以获得所需的搂齿臂角位移线图。点击仿真按钮,将仿真时间设置为0.5 s,步数设置为100,进行运动学仿真计算。计算结束之后,切换到后处理模块,将仿真结果输出,如图8所示。
5 运动误差规律分析
将通过实际模型仿真获得的从动件角位移曲线(图中实线)和通过从动件运动轨迹方程仿真获得的从动件角位移曲线(图中虚线)放在同一个坐标图中进行对比,如图9所示。很容易发现两条曲线最明显的区别是从动件转动的最大角度不同。通过从动件运动规律方程仿真得到的最大转角为90°,而通过实际模型仿真出来的最大转角是77°。曲面轨迹控制导向槽与从动件之间采用的是接触约束,即整个仿真运动周期内,从动件都是与曲面轨迹控制导向槽上滑道的某一个曲面接触滑动的。而在实际运动中,由于重力、摩擦以及配合间隙之间填充的润滑脂等原因,从动件在不同转动位置与曲面轨迹控制导向槽滑道的接触面会发生变化,这将直接导致仿真误差的发生。
6 田间试验
结合对水平旋转式搂草机其他零部件的研究对样机进行了研发和试制[9-11],并在内蒙古呼和浩特市伊利第七牧场进行了试验[12]来验证曲面轨迹控制导向槽从动件的运动规律是否满足实际工作需要。测定从7月8~22日,其中雨休2 d,实际试验时间13 d,工作时间3 627 min,完成每米搂幅搂草132 hm2,超过部标120 hm2的规定,结果如表1和表2所示。由田间试验结果得知,该搂草机搂得的草条质量良好、翻草疏松、漏搂率为2.2%。查阅国家标准JBT 10905-2008得知搂草机的漏搂率应小于5%,说明该搂齿臂的运动轨迹能满足工作需要。
7 小结
1)推导了水平旋转式搂草机曲面导向控制槽从动件的运动规律方程,为曲面导向控制槽的设计提供了理论基础,加快了水平旋转式搂草机的研发速度。
2)水平旋转式搂草机样机搂得的草条质量良好,漏搂率符合国家标准。说明设计的曲面轨迹控制导向槽从动件的运动规律满足实际工作的需要。
参考文献:
[1] 傅美贞.牧草收割机械的现状和发展趋势[J].农机化研究,2009(6):237-239.
[2] 吴 芳.高寒冷凉区紫花苜蓿机械化收获技术[J].农产品加工,2004(8):26-27.
[3] 杨明韶.中国牧草收获机械发展简史[J].农业机械学报,1991(3):1-4.
[4] 张 书.全自动装订机空间圆柱凸轮机构的设计与研究[D].天津:天津大学,2007.
[5] 孙 恒,陈作模,葛文杰.机械原理[M].北京:高等教育出版社,2006.
[6] 赵 韩.凸轮机构运动几何学的通用解析公式[J].机械工程学报,1995(3):22-26.
[7] JB/T 10905-2008旋转搂草机[S].
[8] 李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2006.
[9] 高焕文,罗锡文.农业机械化生产学[M].北京:中国农业出版社,2002.
[10] 中国农业机械化科学研究院编.农业机械设计手册[M].北京:中国农业科学技术出版社,2007.
[11] 李明珍,蒋 红,张凤杰.9LZ-4.0型水平旋转搂草机的设计研究[J].农村牧区机械化,2011(1):15-16.
[12] GB/T 14247-1993搂草机试验方法[S].
