三维PIV应用于船舶精细流场测试研究进展
2015-08-30李茂华
李茂华,龚 杰
三维PIV应用于船舶精细流场测试研究进展
李茂华1,龚杰2
1中国人民解放军63680部队,江苏无锡214000
2哈尔滨工程大学船舶工程学院,黑龙江哈尔滨150001
精细流场作用现象和流动细节对解决船舶与海洋工程领域的疑难问题有重要影响,粒子图像测速(PIV)技术实现了在同一瞬态时刻记录大量空间点上的速度分布信息,可提供丰富的流场空间信息及流动特性。三维粒子图像测速(SPIV)技术在国外已被成功用于研究水面舰船和潜艇在高海况下与船体大幅运动有关的复杂粘性现象及壳体大规模流体分离现象,取得了一定的研究成果;在国内,SPIV技术也已应用于船舶尾流场测量及舰船噪声测量中,试验结果能够真实反映流场特征。未来SPIV试验将与CFD方法相结合,向实船试验研究方向发展。随着计算机技术、激光技术、CCD性能的发展,多方位测量的SPIV系统将是未来重要的研究方向。关键词:三维粒子图像测速;精细流场;流动特性;综述
网络出版地址:http://www.cnki.net/kcms/detail/42.1755.TJ.20150128.1214.019.html
期刊网址:www.ship-research.com
引用格式:李茂华,龚杰.三维PIV应用于船舶精细流场测试研究进展[J].中国舰船研究,2015,10(1):58-67.
LI Maohua,GONG Jie.Development of 3D-PIV applied on fine flow field testing of ships[J].Chinese Journal of Ship
Research,2015,10(1):58-67.
0 引言
粒子图像测速(Particle Image Velocimetry, PIV)是20世纪80年代发展起来的一种瞬态、多点、无接触式的流体力学测速方法[1]。PIV技术克服了单点测速技术的局限性,实现了在同一瞬态时刻记录大量空间点上的速度分布信息,可提供丰富的流场空间信息及流动特性。PIV技术可选择粒子浓度使其成为较高成像密度模式[2],在PIV技术实现过程中,由于其应用激光光源照亮流场待测区域,应用照相系统对待测流场区域进行图像采集,在整个测试过程中所有测量装置均对流场不产生扰动,故PIV技术具有较高的测量精度。
最先进的三维粒子图像测速(简称SPIV或3D-PIV)系统采用立体数码照相技术,即采用多台CCD相机从不同方位记录被照明流场的一个剖面,根据两台相机空间位置投影关系和视差,将两台相机的各二维坐标映射为空间一点的三维坐标,将两台相机的两个二维位移场映射为空间一点的三维位移场,从而完成粒子空间位移场和速度场的重建。最后,通过事先设定的算法获得流场的速度场和压力场等。
国际船模试验水池会议(ITTC)自第25届大会开始专门成立了精细流场测量研究组(Detailed flow measurement)[3],组织世界各国致力于流体力学基础研究的专家、学者开展对此问题的深入研究。海洋中湍流、复杂流动、非定常流动对民用船舶航行性能以及经济性能的影响,复杂海况和高海情引起的湍流、非定常流等耦合流动[4]对军用舰船战斗性能与生存能力的影响是相关领域专家学者一直研究并致力于解决的疑难问题。深入揭示相关问题的产生机理、精细流场作用现象和流动细节,对解决这些疑难问题具有重要意义。例如:潜艇周围绕流场会对潜艇的水动力性能产生直接影响,获得已知艇体形状特征下的精确绕流场(速度场、压力场和噪声场)特性可为得出阻力小、噪声低的最佳潜艇设计方案提供试验依据;船体尾部流体的流动特性是研究船舶推进性能的重要因素,从流场细节着手,分析螺旋桨的尾流场特性是研究舰船推进性能和安静性能的主要技术途径之一。因此,三维PIV技术作为一种先进的流场测试手段就显得意义重大。
1 国外研究进展
过去10年中,国外诸多研究机构和学者已针对水下SPIV设备进行了广泛而深入的研究。2003年,INSEAN开发了第一个拖曳水池水下SPIV系统[4],Felli和Di Felice等[5-6]详细介绍了该套系统及其应用情况。随后,很多ITTC组织成员均开展了水下SPIV系统的研究工作,美国IOWA大学、德国Potsdam造船研究所等[7]先后建成了各自的拖曳水池水下SPIV系统,形成了相应的试验研究能力,取得了一系列成果。
国外SPIV技术应用较为广泛和成熟的领域是船后螺旋桨的相关研究。Calcagno等[8]应用SPIV测量了五叶螺旋桨船舶模型在几个横剖面处的下游尾流场。Bull等[9]完成了两个水面舰艇模型标称伴流和尾流场的测量。同时,还应用激光多普勒测速仪(Laser Doppler Velocimetry,LDV)完成了对实船某一剖面螺旋桨进流的测量。Di Felice等[10]研究了在不同载荷条件下PIV识别螺旋桨附近主要流动结构的能力。Felli等[7]运用PIV和毕托耙测量了船用螺旋桨在不同进速系数下速度与进流波动压力之间的锁相相关性。Stella等[11]完成了“欧洲全尺寸流动研究和技术”(European full-scale flow research and technology)项目,该项目应用LDV完成船舶螺旋桨的进流速度测量,试验对象包括2艘集装箱船、1艘油轮、1艘训练船和1艘挖泥船。Paik等[12]研究了从桨叶后缘到螺旋桨直径范围内的梢涡几何。最近,Di Felice等[13]开展了将SPIV技术应用于螺旋桨叶梢和桨毂处漩涡演变过程的研究。
同时,还有部分研究是关于船后舵的相关内容研究。Anschau和Mach[14]利用SPIV技术研究了一艘水面舰船在定向漂变情况下其半平衡舵周围的流场。Felli等[15]扩展了他们在2006年和2009年完成的工作,全面利用PIV和LDV测量了在自由航行状态下和安装在发动机后状态下桨—舵系统中舵面的压力。
此外,Wu和Miorini等[16-17]分别利用二维PIV技术和三维PIV技术研究了轴流式喷水推进泵旋转管道处的流动形态结构。
近年来,SPIV技术被大量用于研究水面舰船和潜艇在高海况下与船体大幅运动有关的复杂粘性现象及壳体大规模流体分离现象。下文简述国外进行的将PIV技术应用于船舶横摇阻尼水动力特征研究和运用SPIV技术测量潜艇艇体周围精细流场研究的进展。
1.1船舶横摇阻尼水动力特征研究
1.1.1船模试验研究
船舶横摇诱导的流场流体动力特征复杂,为了解横摇阻尼水动力特征,完善粘流横摇模型,开展相关的精细流场测量工作十分必要。国外已经开展了相关研究工作。
2004年,INSEAN,IIHR和NSWCCD三家机构合作完成了横摇状态下复杂表面船舶粘性水动力特征试验[18]。三家机构均选用加装舭龙骨的DTMB 5415船模为研究对象。INSEAN负责完成不同航速下单自由度横摇衰减的LDV测量,测试区域选在8个不同剖面;IIHR负责完成波形测量和PIV测量;NSWCCD负责完成PIV测量以及力和力矩的测量。图1所示为横摇阻尼水动力试验装置示意图。他们最终得出了舭龙骨处流动细节的PIV试验结果与CFD计算结果,并将二者进行对比,结果表明PIV试验结果能够真实反映舭龙骨处的流场流动细节,试验结果具有可靠性。

图1试验装置示意图[18]Fig.1 Experimental setup[18]
图2所示为舭龙骨处横摇状态下的流动细节结果。其中,图2(a)为CFD计算结果,图2(b)为PIV试验结果。对比两图可以看出,PIV试验用于船舶横摇阻尼水动力特征研究是可行的,其测量精度符合设计要求,试验结果能够比较真实地反映流场的流动特征。

图2 舭龙骨处横摇状态下的流动细节对比[19]Fig.2 Comparison of flow details at bilge keel in rolling state between CFD and PIV[19]
1.1.2实船试验研究
在船模试验基础上,实船SPIV试验也在进行。Atsavapranee等[19]在一艘意大利船舶Nave Bettica号上运用PIV技术进行了舭龙骨处粘性流场的实船试验研究,这是第一次将PIV技术运用到实船试验研究中。为避免影响试验操作,PIV设备的安装选定在干船坞期(图3)。但实船试验面临的问题很多,对试验设计、试验条件控制、试验PIV设备的制造安装等要求较高,故试验结果精度不是十分理想。
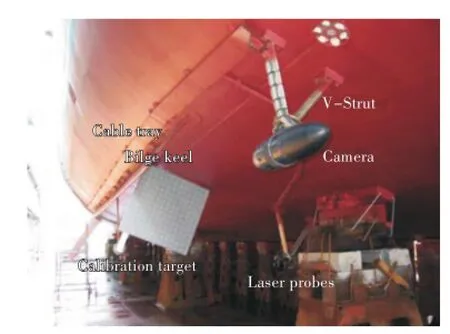
图3Nave Bettica号上的PIV装置[19]Fig.3 PIV setup on Nave Bettica[19]
图4所示为Nave Bettica号在12.8 kn航速下舭龙骨处静水横摇衰减试验的PIV试验结果。
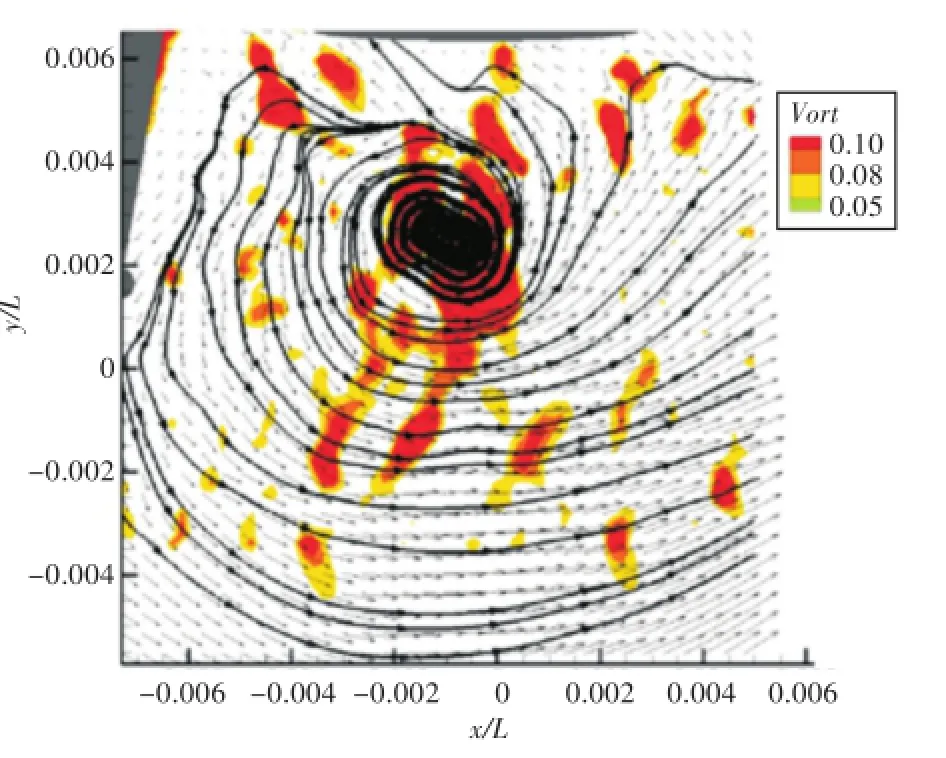
图4 PIV试验结果[19]Fig.4 Results of PIV measurement[19]
1.2潜艇艇体周围流场测量
潜艇在水下做匀速运动时,周围的水介质与艇体产生相对运动而形成绕艇体流动的流场。潜艇周围的绕流场不仅会对潜艇水动力性能产生直接影响,而且还会对潜艇隐身性能产生影响。因此,开展潜艇几何形状与绕流场特性的关联研究,寻求能在已知艇体形状特征下精确预报绕流场(速度场、压力场和噪声场)特性的数值计算方法十分重要。
1.2.1试验设计及测量
Felli[5]等对某潜艇艇体周围流场进行了PIV测量。试验设计的思路是将常规三维PIV系统置于密封水下雷体内,在水下完成PIV的照明和拍摄。水下PIV系统设计必须满足常规PIV试验对应的速度、深度和测试面积等尺度要求,对测试流场干扰较小,既适用于不同水下PIV测试剖面的测量,又适用于拖曳水池中相对恶劣的试验环境。
图5所示为国外某水池的三维水下PIV设备图,图6所示为对某潜艇艇体模型的周围流场进行测量的试验图。

图5 三维水下PIV设备图Fig.5 3D-PIV underwater equipment
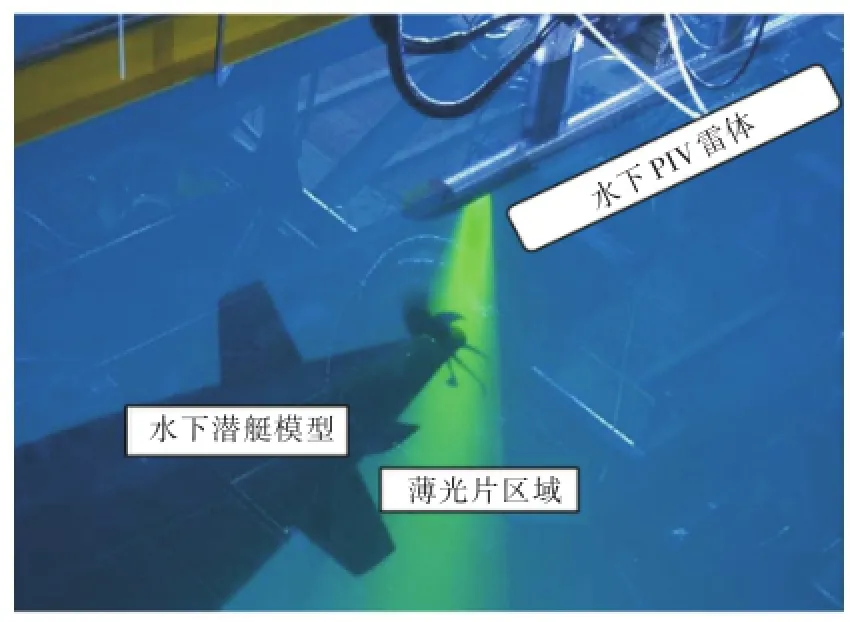
图6 测量某潜艇模型周围流场试验图Fig.6 Measuring flow field around a submarine model
1.2.2试验结果
图7所示为数据经过处理后得到的在潜艇表面x/L=0.5,0.625,0.75和1.05这4个不同横剖面处的流场矢量图。
该试验验证了在拖曳水池中运用三维PIV技术对水下模型周围流场进行高分辨率测量的可行性。针对模型周围流场测量的验证性试验表明,该系统面内速度测试误差在可接受的范围之内。
随着需求越来越多,将PIV系统应用于潜艇周围流场的测量会越来越普遍,PIV技术对周围流场的测量也会随着改进而越来越精确,进而走向成熟。
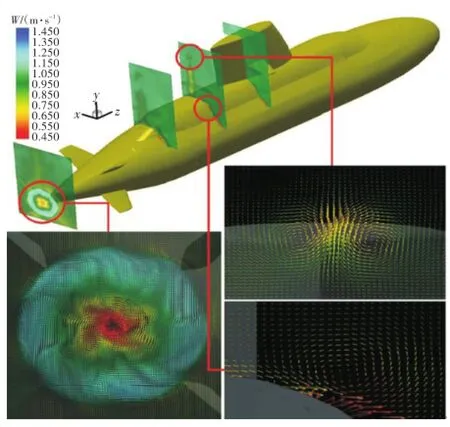
图7 不同剖面处流场矢量图Fig.7 Velocity field vector graph for different cross-sections
2 国内研究进展
国内在PIV技术的使用方面起步较晚,研究内容的范围和深度不够,试验设备与国外相比存在较大差距,但是近10年来也取得了不少成果。
国内目前的研究成果大多是基于二维PIV设备所取得,三维PIV用于水动力学研究还比较少。
在螺旋桨尾流场测量方面,张军等[20]研究了导管螺旋桨内流场的SPIV测量,首次将PIV技术应用到了螺旋桨流场测试中;张国平等[21]进行了螺旋桨尾流场PIV与LDV对比测试研究,首次实现了PIV测试方法在大型设备和螺旋桨尾流场测试中的应用;李广年等[22-23]进行了大型空泡水筒中螺旋桨尾流场2D-PIV测量研究以及PIV技术在旋转流场测试中的应用研究。
在其他流场测量方面,赵维义[24]研究了应用SPIV测量舰船空气尾流场,获得了舰船空气尾流场特性;代钦和赵莉莉[25]研究了近自由表面翼型尾流速度场的PIV测量及POD分析;张强[26]研究了PIV技术在实验室模拟冰下流场测试中的应用。
张国平等[27]介绍了国内第一套随车式SPIV水下系统,其使用效果接近国外同类设备水平。下文将以某大学船模水池实验室水下SPIV设备为例,介绍其在KCS船尾部伴流和仿生凹凸鳍体伴流场测量中的应用,展示国内研究的最新进展。
2.1KCS船尾部伴流测量
船体尾部流体的流动特性是研究船舶推进性能的重要因素。船体周围的流场是三维流动的,流场介质存在粘性,因此船舶绕流的分析十分复杂,这种复杂性集中体现在船舶尾部流动和伴流场中[28]。而在船用螺旋桨设计中,船体尾部伴流场分布的精确预报更是螺旋桨成功设计的前提[29]。因此,在船舶设计阶段,准确预报、获得船舶尾部伴流场信息至关重要。
2.1.1试验对象与内容
试验对象选定为韩国船舶与海洋工程研究所(KRISO)设计建造的3 600 TEU集装箱船(KCS),模型如图8所示,模型的详细参数如表1所示。试验地点为某大学船模水池实验室。

图8 KCS船舶模型Fig.8 KCS model

表1 KCS船舶模型主要参数Tab.1Main parameters of the KCS model
试验内容包含3个部分:
1)测试在不同速度下桨盘面处的伴流场;
2)测试在不同吃水下桨盘面处的伴流场;
3)测试在不同纵倾下桨盘面处的伴流场。
2.1.2试验设计与测量
PIV测试船舶艉流场的一般步骤为:
1)完成三维水下PIV设备连接并调试,保证各子系统工作正常;
2)对船艉桨盘面处位置进行标定,使得图片的像素点信息与实际距离形成对应关系;
3)向流场播撒示踪粒子并以脉冲片光源照明;
4)以相机拍摄等方式记录多次曝光的流场粒子图像;
5)在配套处理软件中逐点处理PIV底片或CCD记录的图像,对所得流场粒子图像进行分析处理,提取位移场,除以两次曝光时间间隔,获得速度矢量场,并获得流场速度分布。
图9所示为试验过程中的PIV系统,图10所示为船模艉部模型及船艉的粒子图像。

图9 PIV系统试验图Fig.9 PIV system during the measurement process
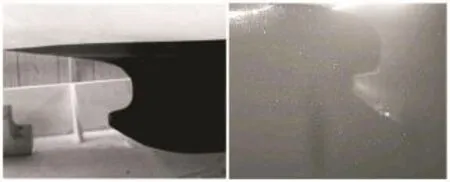
图10 船艉模型和船艉粒子图像Fig.10 Stern model and stern particle image
2.1.3试验结果
在设计吃水、纵倾为0.1°的情况下,测得当实船速度Vs依次为22,23,24和25 kn时桨盘面处的伴流场,通过计算可得出各计算模型船体艉部螺旋桨所在平面处的轴向伴流等值线图(如图11所示,其中圆形实线表示桨盘面的所在位置)。从图11中可以看出,随着航速的增加,船尾伴流均匀性会下降,桨轴处诱导速度会随之提高。


图11不同航速下桨盘面处的伴流场Fig.11 Wake fields under different Vs
图12所示为不同吃水下桨盘面处的伴流场。从图12(a)和图12(b)的对比来看,随着吃水的增加,在航速稳定情况下伴流分数增加,这与船舶表面的湿表面积增加有关。

图12不同吃水下桨盘面处的伴流场Fig.12 Wake fields under different draughts
图13所示为不同纵倾下桨盘面处的伴流场。从图13(a)和图13(b)的对比来看,随着纵倾的增加,船艉部下沉,轴向伴流出现紊乱情况,但是轴向伴流的集中程度提高,因此可以预测,在某一纵倾值下尾部伴流能提高螺旋桨的推进效率。

图13 不同纵倾下桨盘面处的伴流场Fig.13 Wake fields under different trims
总之,应用PIV进行船舶尾部伴流场测量的试验结果良好,PIV试验是一种直接获得船舶精细绕流场的优良手段。
2.2仿生凹凸鳍体伴流场测量
2.2.1试验对象与内容
试验对象选定NACA0020翼型为基础翼型,并以仿生凹凸鳍为改进翼型,模型如图14所示,模型的详细参数如表2所示。
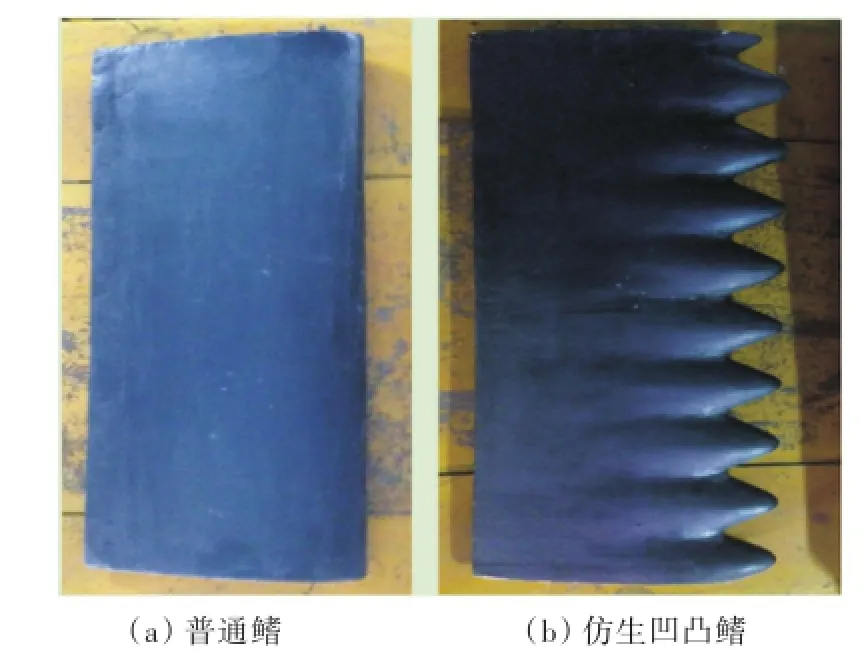
图14 PIV试验模型Fig.14 PIV test model for common fin and bionic bump fin

表2 鳍模型详细参数Tab.2Detail parameters of fin models
试验内容设定如下:在平静水面、航速为1 m/s条件下,测量普通鳍与仿生凹凸鳍在迎流剖面和鳍中剖面攻角分别为10°和30°时的伴流场。
2.2.2试验设计与测量
PIV测量通过3个步骤完成:
1)播撒足够的示踪粒子,形成粒子浓度均匀的粒子场来代替流场;
2)激光发射器发射激光照射示踪粒子,被照射粒子作为瞬时流场流体观测质点,同时2个不同位置的相机进行双帧拍摄生成一对互相关图像;
3)应用Dynamic Studio软件对多幅双相机照片进行去噪、矢量生成、去除矢量误配并合成鳍体伴流场。
图15所示为试验过程中的仿生凹凸鳍,图16所示为SPIV系统采集到的粒子图像。
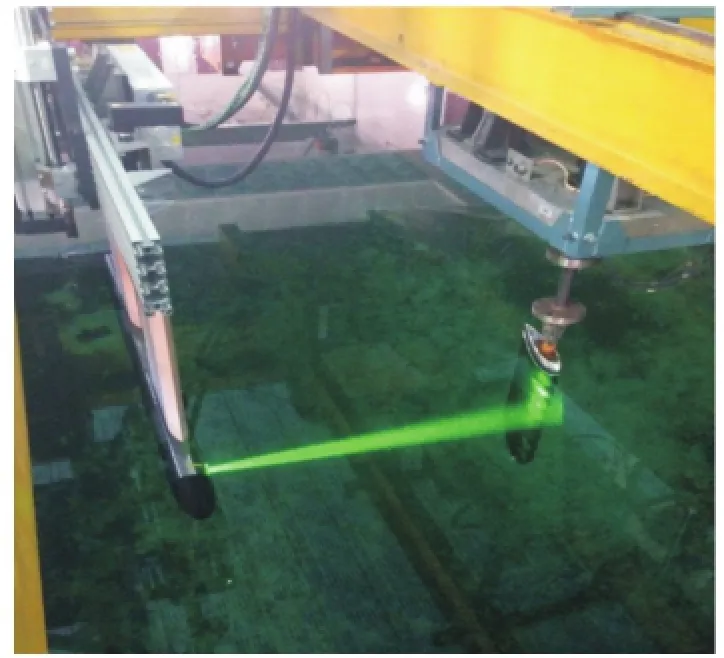
图15 仿生凹凸鳍试验图Fig.15 Bionic bump fin under test

图16 SPIV系统采集到的粒子图像Fig.16 Particle image collected by SPIV system
2.2.3试验结果
在平静水面、航速为1 m/s条件下,普通鳍在30°攻角下迎流面流场测量和30°攻角下尾流场测量的结果图17所示。
从图17(a)中可以看出,右侧浅蓝色部分为此次测量中-1.0 m/s的水流流速,此时迎流面导致大范围的加速流场,因翼面作用使得流速增加,水流水平方向有向外移动的趋势。从图17(b)中可以清晰地看出,在背流面形成了特别大的速度回流,可以确定此处产生了大型滞留涡,这是由于鳍背面大范围的失速导致,此时边界层分离严重。
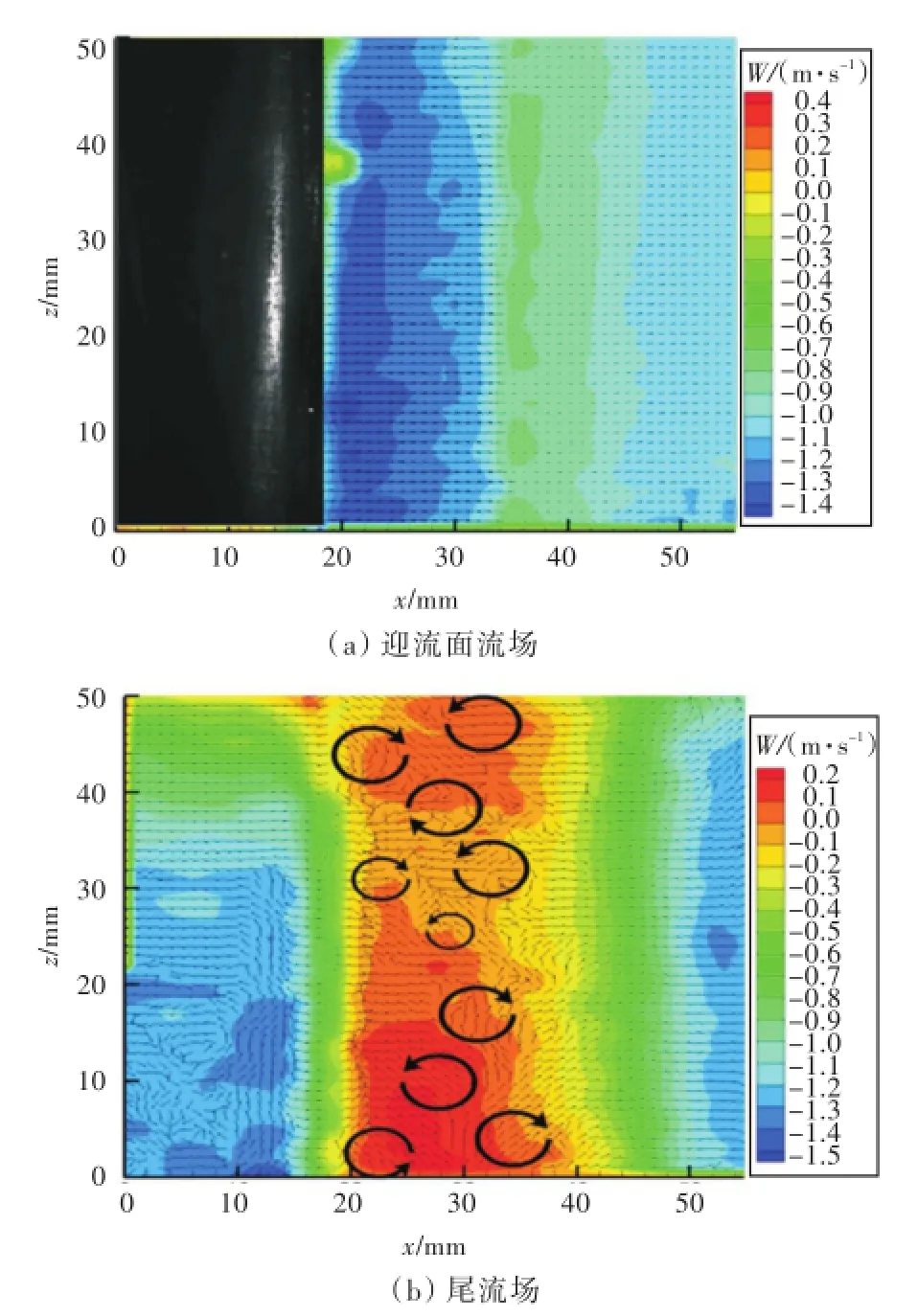
图17 普通鳍在30°攻角下的迎流面流场和尾流场Fig.17 Incident flow field vs.wake flow field for common fin under 30°angle of attack
在平静水面、航速为1 m/s条件下,仿生凹凸鳍在30°攻角下迎流面流场测量和30°攻角下尾流场测量的结果如图18所示。
从图18(a)中可以看出,因为凹凸结节的影响,使得近凸结节流速减缓,靠近凹槽的位置产生了一对反向涡,这对涡随着向后运动过程会逐渐合并变大。从图18(b)中可以看出,在背流面也形成了部分回流,但是与普通鳍相比回流涡范围明显缩小,此处的滞留涡形式更不稳定,滞留涡表面的流线与外界有明显的流动交互。

图18 仿生凹凸鳍在30°攻角下的迎流面流场和尾流场Fig.18 Incident flow field vs.wake flow field for bionic bump fin under 30°angle of attack
3 未来发展方向
3.1试验与计算流体力学方法相结合
从国内外的经验来看,近年来计算流体力学(CFD)的飞速发展已经使其成为一种优良的辅助测试手段并被广泛采用。它能帮助我们更好地模拟和了解船舶精细流场的流动特性,其计算成本低,可重复性强,还能获取精细流场中任何一处的流动细节。
CFD软件已经较为成熟,若能合理进行计算模型的网格划分、边界条件处理和物理模型选择,数值计算结果就可以作为PIV测量船舶精细流场的参考来解决目前存在的争议性问题,还可以对目前无法使用试验手段进行的研究做出前瞻性的预测。充分利用CFD的优势,并将其与SPIV试验相结合,将使SPIV的发展提升到新的层次。
3.2拓展应用范围
SPIV有案可查的应用范围大多局限于实验室船舶精细流场研究方面,关于实船SPIV试验的内容较少,国内尚未开展实船SPIV试验研究,原因在于实船试验的难度大、成本高、试验精度不够。
实船试验面临的问题是船模试验中不会碰到的,具体问题如下:
1)试验设计。如何使试验区域均布示踪粒子,如何使实船达到预定的设计状态,如航速、横摇角度、螺旋桨转速等,都需要经过精心设计。
2)不确定因素影响。实船试验数据的有效性受人为因素的影响较大,不同的试验人员对同一艘船在同一时刻得到的试验数据都会有差异[30]。此外,试验区域的海况条件不可控,这也增加了试验的难度。
但是,实船试验得出的结论是最具有实用价值的第一手资料,其珍贵程度远非模型试验能够相比。同时,由于船模尺度效应和实验室条件的理想化,在将试验结论真正转换到实船上时,其可靠性会下降。因此,尽管开展实船SPIV试验难度大、困难多,但是将SPIV的应用范围拓展至实船试验是未来非常重要的发展方向。
3.3研制全方位、高精度的SPIV设备
从实际使用情况来看,现阶段SPIV设备的使用局限非常明显。通常,选定流场的测量面很丰富,例如侧向安排激光雷体能够进行船体表面的横剖面测量,雷体安装在尾部可以进行船体纵剖面的测量,偏移的雷体布置能够进行流线区域测量等。
然而,根据水池实际条件定制的SPIV设备常常为了仪器安装的精度和设备可靠性,会对很多方面进行定向设计,从而导致设备只能进行一个方向的布置安装,因此能够进行的试验内容很有限,这就严重限制了PIV设备功能的拓展。
同时,随着未来SPIV设备硬件的不断革新,CCD相机性能会不断提高,随着计算机技术、激光技术的不断发展,SPIV设备的处理算法将不断优化,这些都会较大提升设备的精度。
如何使PIV设备一体化、灵活化和人性化,研制多方位测量的高精度SPIV系统,将是未来PIV设备制造方面一个比较重要的发展方向。
4 结语
上述国内外SPIV的应用实例说明SPIV技术和设备已经发展到一定的成熟度,运用SPIV设备对船舶精细流场的测量已经从理论研究发展到大量实践阶段。除本文列举的部分内容外,它还能应用到层流边界层和湍流边界层测量、沿海海底边界层测量、海洋内波测量等诸多流体力学领域。
SPIV技术在国外发展起步早、基础好、设备精度高,研究范围涵盖了从学术研究到工程应用的诸多方面,获得的成果处于世界领先地位;国内对PIV技术的研究近几年也是日新月异,学者们既注重PIV技术的实际运用,又注重PIV技术在学科交叉领域的应用研究,这对于迅速提升在学术界内的话语权具有重要作用。
未来SPIV技术的发展需要与计算流体力学方法相结合,以便更加高效地完成试验研究;需要注重SPIV设备的适用性,为研制多用途、全方位、高精度的SPIV系统不懈努力;SPIV实船研究虽然难度大,但仍然是未来SPIV试验发展的重要方向。
[1]唐洪武.现代流动测试技术及应用[M].北京:科学出版社,2009.
[2]孙鹤泉,康海贵,李广伟.PIV的原理与应用[J].水道港口,2002,23(1):42-45. SUN Hequan,KANG Haigui,LI Guangwei.Theory and application of PIV[J].Journal of Waterway and Har⁃bour,2002,23(1):42-45.
[3]吴有生,颜开.24届ITTC的大会情况和25届ITTC的主要任务[C]//第六届船舶力学学术委员会全体会议专集.无锡:中国造船工程学会船舶力学学术委员会,2006.
[4]FELLI M,DI FELICE F.Propeller wake analysis in non uniform inflow by LDV phase sampling techniques[J].Journal of Marine Science and Technology,2005,10(4):159-172.
[5]FELLI M,PEREIRA F,CALCAGNO G,et al.A modu⁃lar Stereo-PIV probe for underwater applications:con⁃figurations and measurement performance[C]//Pro⁃ceedings of 5th International Sympsium on Particle Im⁃age Velocimetry(PIV'03).Busan,Korea,2003.
[6]DI FELICE F,PEREIRA F.Developments and appli⁃cation of PIV in naval hydrodynamics[M]//Particle Im⁃age Velocimetry.Berlin:Springer,2008:475-503.
[7]FELLI M,DI FELICE F,GUJ G,et al.Analysis of the propeller wake evolution by pressure and velocity phase measurements[J].Experiments in Fluids,2006,41(3):441–451.
[8]CALCAGNO G,DI FELICE F,FELLI M,et al.Pro⁃peller wake analysis behind a ship by Stereo PIV[C]// Proceedings of 24th Symposium on Naval Hydrodynam⁃ics.Fukuoka,Japan,2002,3:112-127.
[9]BULL P,VERKUYL J B,RANOCCHIA D,et al.Pre⁃ diction of high Reynolds number flow around naval ves⁃sels[C]//Proceedings of 24th Symposium Naval Hydro⁃dynamics.Fukuoka,Japan,2002.
[10]DI FELICE F,DI FLORIO D,FELLI M,et al.Ex⁃perimental investigation of the propeller wake at dif⁃ferent loading conditions by particle image velocime⁃try[J].Journal of Ship Research,2004,48(2):168-190.
[11]STELLA A,GUJ G,DI FELICE F.Propeller wake flowfield analysis by means of LDV phase sampling techniques[J].Experiments in Fluids,2000,28(1):1-10.
[12]PAIK B G,KIM J,PARK Y H,et al.Analysis of wake behind a rotating propeller using PIV technique in a cavitation tunnel[J].Ocean Engineering,2007,34(3/ 4):594-604.
[13]DI FELICE F,DEL ROSSO C,ROMANO G P.On the formation and evolution of the tip and hub vortex of a propeller[C]//Proceedings of the 2nd International Conference on Advanced Model Measurement Tech⁃nology for the EU Maritime Industry(AMT'11).New⁃castle,UK,2011.
[14]ANSCHAU P,MACH K P.Stereoscopic PIV measure⁃ments of rudder flow and vortex systems in the towing tank[C]//Proceedings of the 1st International Confer⁃ence on Advanced Model Measurement Technology for the EU Maritime Industry(AMT'09).Nantes,France,2009.
[15]FELLI M,FALCHI M,PEREIRA F,et al.Dynamics of the propeller wake structures interacting with a rud⁃der[C]//Proceedings of the 28th Symposium on Naval Hydrodynamics.Pasadena,USA,2010.
[16]WU H,MIORINI R L,KATZ J.Tip leakage vortex structure and turbulence in the meridional plane of an axial pump[C]//8th International Symposium on Parti⁃cle Image Velocimetry.Melbourne,Australia,2009.
[17]MIORINI,R L,WU H,TAN D,et al.Flow structures and turbulence in the rotor passage of an axial water⁃jet pump at off-design conditions[C]//Proceedings of the 28th Symposium on Naval Hydrodynamics.Pasa⁃dena,USA,2010.
[18]The Specialist Committee on Scaling of Wake Field. Final report and recommendations to the 26th ITTC[C]//Proceedings of 26th ITTC.Brazil,2011.
[19]ATSAVAPRANEE P,ENGLE A,GRANT D J,et al. Full-scale investigation of viscous roll damping with particle image velocimetry[C]//27th Symposium on Naval Hydrodynamics.Seoul,Korea,2008.
[20]张军,张志荣,朱建良,等.导管螺旋桨内流场的PIV测量[J].实验流体力学,2007,21(2):82-88. ZHANG Jun,ZHANG Zhirong,ZHU Jian1iang,et al.Investigation of internal flow field of ducted propel⁃ler using particle image velocimetry[J].Journal of Ex⁃periments in Fluid Mechanics,2007,21(2):82-88.
[21]张国平,陆林章,李广年,等.螺旋桨尾流场PIV与LDV对比测试研究[C]//第二十一届全国水动力学研讨会暨第八届全国水动力学学术会议暨两岸船舶与海洋工程水动力学研讨会论文集.北京:海洋出版社,2008.
[22]李广年,张国平,陆林章,等.大型空泡水筒中螺旋桨尾流场2D-PIV测量[J].船舶力学,2009,13(5):682-687. LI Guangnian,ZHANG Guoping,LU Linzhang,et al. Propeller wake analysis by means of 2D-PIV in large cavitation tunnel[J].Journal of Ship Mechanics,2009,13(5):682-687.
[23]李广年,李磊,谢永和.PIV技术在旋转流场测试中的应用[J].中国造船,2011,52(1):145-150. LI Guangnian,LI Lei,XIE Yonghe.Phase-averaged PIV technique and its applications in rotary flow mea⁃surement[J].Shipbuilding of China,2011,52(1):145-150.
[24]赵维义.PIV测量舰船空气尾流场[J].实验流体力学,2007,21(1):31-35. ZHAO Weiyi.PIV measurements of the warship air-wake[J].Journal of Experiments in Fluid Me⁃ chanics,2007,21(1):31-35.
[25]代钦,赵莉莉.近自由表面翼型尾流速度场的PIV测量及POD分析[J].水动力学研究与进展:A辑,2008,23(2):196-203. DAI Qin,ZHAO Lili.PIV measurement of wake flow of an airfoil near free surface and the POD analysis[J].Chinese Journal of Hydrodynamics:Ser.A,2008,23(2):196-203.
[26]张强.PIV技术在实验室模拟冰下流场测试中的应用[D].大连:大连理工大学,2009.
[27]张国平,张军,陆林章,等.拖曳水池水下三维PIV测试系统研究[C]//第九届全国水动力学学术会议暨第二十二届全国水动力学研讨会论文集.北京:海洋出版社,2009.
[28]黄少锋,张志荣,赵峰,等.带自由面肥大船粘性绕流场的数值模拟[J].船舶力学,2008,12(1):46-53. HUANG Shaofeng,ZHANG Zhirong,ZHAO Feng,et al.Numerical simulation of viscous flow with free-surface around full ships[J].Journal of Ship Me⁃chanics,2008,12(1):46-53.
[29]王国强,董世汤.船舶螺旋桨理论与应用[M].哈尔滨:哈尔滨工程大学出版社,2005.
[30]顾溟宇.实船航速预报方法研究及其集装箱船试航验证[D].大连:大连理工大学,2013.
[责任编辑:易基圣]
Development of 3D-PIV Applied on Fine Flow Field Testing of Ships
LI Maohua1,GONG Jie2
1 The 63680thUnit of PLA,Wuxi 214000,China
2 School of Shipbuilding Engineering,Harbin Engineering University,Harbin 150001,China
The phenomenon of fine flow field and the flow details have great influences on the field of ship and ocean engineering.The PIV technology successfully records the velocity distribution of multiple space points at the same moment,which provides abundant spatial information of the flow field and the flow char⁃acteristics.Currently,SPIV has found its application internationally in the investigation of massive cross-flow separation in the case of ship and submarine maneuvering as well as the complex viscous phe⁃nomena associated with large-amplitude ship motions in high sea states.Domestically,researchers have ap⁃plied SPIV into the research of the measurement of wake field and the noise field of ships,whose results truthfully reflect the flow characteristics.As SPIV trials are bound to combine with the CFD method in the future,the experimental study of full-scale ships shall also be promoted.It can be safely concluded that with the developments of computer technology,laser technology,and CCD performance,the research and development of the multidimensional measurement SPIV system will become a key research topic in marine engineering.
Stereoscopic Particle Image Velocimetry(SPIV);fine flow field;flow characteristics;overview
U661.31+3
A
10.3969/j.issn.1673-3185.2015.01.009
2014-06-22
网络出版时间:2015-1-28 12:14
国家自然科学基金资助项目(41176074,51209048);教育部博士点基金资助项目(20102304120026)
李茂华,男,1981生,工程师。研究方向:舰船总体与性能研究
龚杰(通信作者),男,1991年生,硕士生。研究方向:船舶推进与节能,流体力学实验技术。E⁃mail:gongjie09@foxmail.com
