基于GNSS-R 干雪深度检测的研究
2015-08-26邵礼明张云孟婉婷袁国良
邵礼明, 张云, 孟婉婷, 袁国良
(1. 上海海事大学 上海 201306; 2. 上海海洋大学 上海 201306)
目前, 包括美国的GPS、 俄罗斯的GLONASS、 中国的BeiDou 等星座在内的全球导航卫星系统 (Global Navigation Satellite System), 通过稳定的电磁波信号, 可以提供精确的定位、导航和授时信息,GNSS-R(GNSS-Reflection)以其大量的信号资源、低成本、全天时等特点,近年来成为国内外的研究热点。
干雪是处于高纬度、 高海拔地区拥有的特殊天气现象,干雪与湿雪的区别主要在于所含的水分多少,干雪中不包含水分,例如,像南极洲这样天气极其干燥、全年降水量甚少的地方,适合干雪的存在。
现有的雪深检测方法有很多,从传统上讲,可以通过人工测量工具,例如尺子或者标杆,现场对雪深进行测量,这种方法得到的结果非常准确,但是如果需要测量不同区域范围的雪深时,该方法将会费时费力。
Proko[1]所采用的激光扫描仪(TLS,terrestrial laser scanner)的方法也可用来检测雪深。 TLS 测量法获得的雪深精确度受目标分辨率、光束直径、扫描持续时间、雪的反射率和穿入雪层中激光雷达信号限制。 除此之外,假如雪表面是湿的,或者雪颗粒较大, 只有50%左右的TLS 发射脉冲可以被接收到,这会对最终结果造成很大影响。 但是通过TLS 方法,可以得到比较精确的雪深结果,误差在10 cm 范围内。
在Lutz[2]等人研究中,对雪深测量采用的是空载雷射扫描法(ALS,airborne laser scanning)。 ALS 方法对大面积(至少几十平方公里)检测雪深的精度要求来说,是一个稳定、成本划算的方法。 但是,ALS 方法同样面临着一些挑战:1)每次扫描范围有限;2)必须对每次扫描的位置单独进行测量;3)需要对另外区域进行再扫描,才可以得到雪深的连续覆盖范围。
文中采用基于GNSS-R 技术的方法,对南极洲干雪深度进行定性检测。相比于其他雪深检测实验,GNSS-R 技术有着许多优势:1)由于发射信号源是卫星,采用异源观测模式,因此有着大量的信号源可以利用,可以在一次实验中搭载多个接收机进行数据采集,接收机成本大大下降;2)反射信号直接携带反射面特性信息,反射信号的幅值、相位、极性和频率等参量的变化,都直接与反射面有关;3)采用的扩频技术具有干扰小、抗干扰性能强等特点,可以接收到淹没在噪声之中的低功率信号;4)对于一些环境恶劣的条件,例如:南极、北极、海面等地方,GNSS-R 检测技术将带来极大的方便性和安全性。因此,GNSS-R 技术对于海洋遥感、陆地遥感、灾害预警等方面来说,有着大好前景和深远意义。
1 实验原理
在1993 年, 欧空局的科学家Martin-Neira 首次提出,对检测到的GPS 的反射信号进行利用的概念[3]。 1994 年,法国科学家Auber 在进行机载飞行实验时,意外接收到GPS 的反射信号,证明了反射信号是可以被接收到的[4]。 自此之后,欧洲、美国等发达国家陆续展开了利用卫星反射信号反演地面参数的实验,主要方向集中在:海面测高[5]、海面风场、海洋盐度、土壤湿度等领域。
当发射信号入射到干雪区域时,由于干雪从表面到深处的几百米处有着不同的雪层,每层干雪的相对介电常数不同(ε),信号会在干雪-空气接触面以及内部不同雪层间交汇面发生反射, 或者再次入射, 达到更深的雪层。 在MRSR(multiple-ray single-reflection)模型中,如图1 所示,卫星信号平行入射,并遵循斯涅耳定律(n 表示折射率)。MRSR 模型表示从信号发射到接收的整个过程,每一条信号射线只进行单次反射,向上传播,并到达接收机。
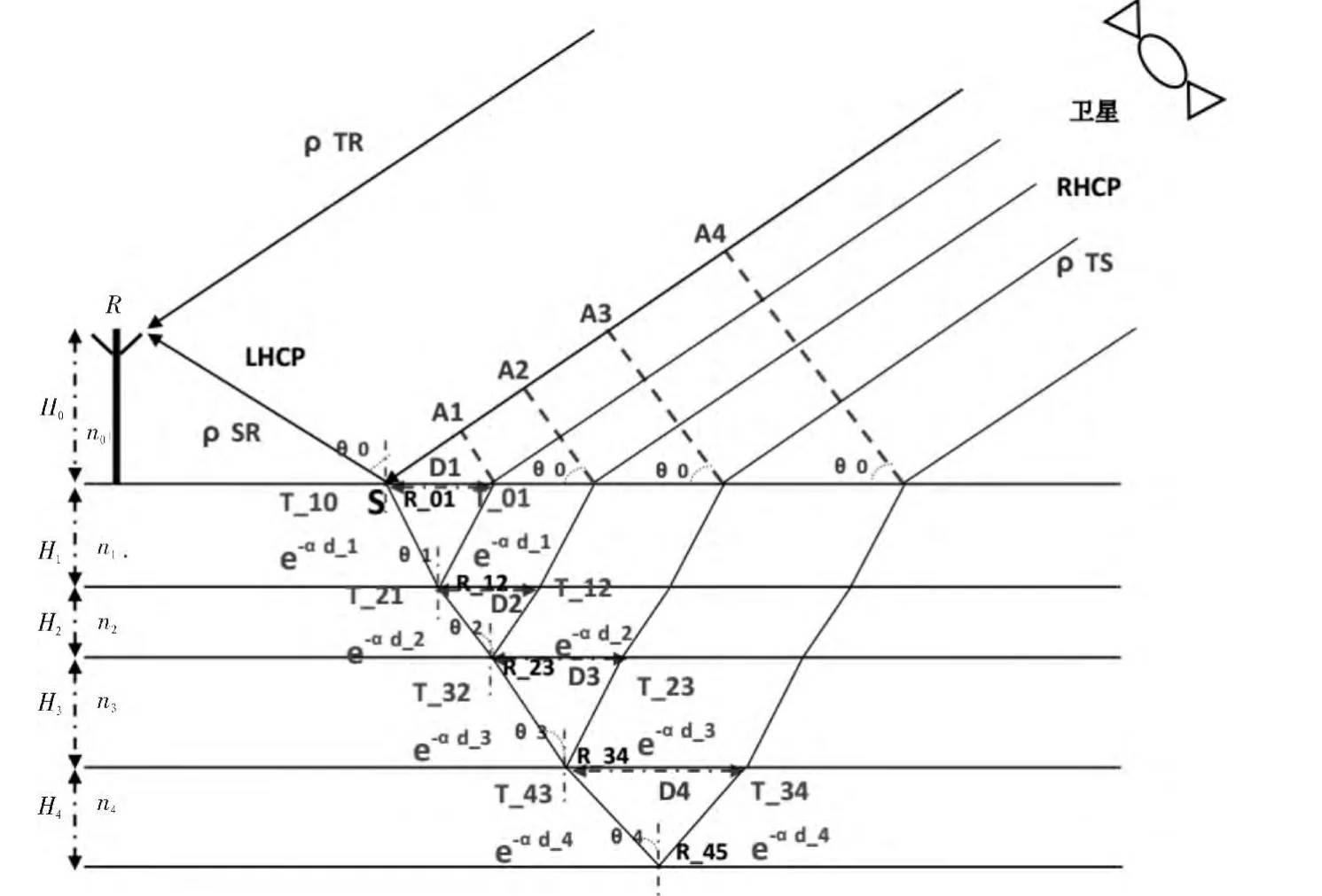
图1 MRSR 模型示意图Fig. 1 Sketch of MRSR model
1.1 第i 层干雪对信号造成的延迟
当信号射线传播到第i 层,并在此层底部反射,向上传播到接收机,这时反射信号和直射信号的延迟ρi,可以用迭代方法解决,在文中公式中,第0 层是空气介质,所以,0 层延迟表示雪-空气表面对信号造成的延迟(图1 中的S 点):

下标TS,SR,TR 分别指的是发射机-镜面反射点, 镜面反射点-接收机,发射机-接收机。 那么,通过递推可知,第i层的一般表达式是[6]:

1.2 第i 层干雪对反射信号幅度产生的影响
MRSR 模型的下一步是估算信号射线在第i 层内部的幅度Ui。 首先,需要考虑以下两个问题:
1)入射和反射的菲涅尔方程,入射系数用T 表示,反射系数用ℜ 表示。
2)信号射线在每层干雪中的传播衰减常数α[7]。
卫星发射的GPS 信号是右旋圆极化的(RHCP,right-hand circular polarization)。 为了从圆极化信号获得反射和入射系数,要求采用以下运算:

其中下标co 和cross 分别和共极化T‖和ℜ‖交叉极化,和表示菲涅尔方程中的入射系数T⊥和ℜ⊥反射系数的平行分量,和表示菲涅尔方程中的入射系数和反射系数的垂直分量。另外,要求考虑到信号向上传播和向下传播两种情况:用Tij作为入射系数,表示卫星信号从第i 层介质和第j 层介质界面穿过,需要指出的是Tij和Tji是两个不同的概念,数值上并不相等。 ℜij指的是从第i 层介质与第j 层介质界面信号的反射系数。 因此,图1 中的在接下来的分析中必须理解成ℜcross,T理解成Tco。
因为发射的GPS 信号经过介质反射后,由原来的右旋圆极化信号, 大多转化为左旋圆极化信号 (LHCP,left-hand circular polarization),所以文中采用LHCP 天线接收的信号数据进行分析。
类似的,在第0 层空气介质中,经过干雪-空气接触面反射的信号,相对于入射信号的振幅可以表示成:

那么,用迭代的方式,可以得到第k 层中信号振幅:

2 数据分析
2009 年12 月, 欧空局开展了一项关于海冰和干雪的研究项目(GPS-SIDS,Sea Ice and Dry Snow project),实验目的是为了探究GPS-R 接收机接收的GPS 反射信号用于遥感海冰和积雪特性的可行性。 文中采用欧空局地球观测中心提出的多路射线单次反射模型(MRSR)反演雪深的方法,对欧空局2009 年12 月20 日8 号卫星采集GPS-SIDS 的实验数据进行分析。
实验所用的GNSS-R 接收机是GPS 开环差分实时接收机(GOLD-RTR)[8],能够通过相关器(lag)接收I、Q 两路波形。在距离干雪表面高度约45 m 的接收塔上, 直射天线水平放置朝向天顶,接收GPS 发射的直射信号;两个反射天线,左旋圆极化(LHCP)天线和右旋圆极化(RHCP)天线水平放置,接收从干雪表面和内部反射回来的反射信号。
每个波形分别用64 个同相(I)和正交(Q)延迟器(lag)以1 kHz 速率进行采样储存,每个lag 空间分辨率为15 m,将获得的波形进行1-s 积分,I、Q 支路结果的总波形如图2 所示(颜色的深浅表示时间的不同),接收到的反射信号不是规则的三角波形,而是一系列歪曲的三角形,有着拖尾和次峰,这与MRSR 模型中不同雪层对信号造成不同延迟相对应。

图2 同相和正交信号的总振幅Fig. 2 Total amplitude of in-phase and quadrature signals
从信号总振幅的时间序列可以看出, 波形在不同的lag中是振荡的。 GPS C/A 码码片长度约为300 m,等于20 个lag总分辨率长度,一些来自更深干雪层中的延迟信号会超过码片长度,也就是说,分析雪深时需要考虑所有相关器接收到的信号,而不仅仅是波峰所在位置,因此,对每个lag 接收到的信号单独进傅里叶运算,并进行累加,可以大致得到干雪在不同深度的回应值,如图3 所示,在表面的10 m 附近,内部的85 m,135 m,225 m 附近有较明显峰值出现。
3 实验结果验证
为了验证真实数据得到的结果是否正确,可以用真实数据与相同几何条件下的仿真结果进行对比,从而得出结论。

图3 干雪深度的初步结果Fig. 3 Preliminary result of dry snow depth
通过仿真, 把不同雪层中得到的所有信号强度相加起来,可以得到接收机接收到的I、Q 支路信号波形,每层雪中的信号波形可以用GPS C/A 码三角函数近似表示。 在仿真复波形之前,需要知道每层雪相对于直射信号产生的延迟ρi、雪层中信号的振幅Ui,以及接收到的信号相对直射信号产生的相位:

作为参考的直射信号的峰值设置在第22 个lag 处:

考虑到GPS C/A 码的码片宽度为20 个lag,也就是说C/A 码自相关函数必须限制在±300 m 的范围内,因此,每个lag接收到的复波形可以表示成:


图4 接收机接收到的仿真波形Fig. 4 The simulated waveform received by receiver
对仿真出的信号波形,按照处理真实数据的方法,在每个lag 中单独进行傅里叶变换,并把所有延迟轴的傅里叶变换结果相加起来,可以近似得到雪深与信号振幅的关系,见图5。图中可以看到在表面的10 m 附近, 内部的85 m、135 m 和265 m 附近有较多信号反射出去,到达接收机。 仿真结果与真实数据有很好的一致性,证明了真实数据的正确性。
4 结 论

图5 仿真得到的雪深与振幅的关系Fig. 5 The relationship between snow depth and amplitude achieved by simulation
通过文中的数据分析,运用MRSR 模型初步反演出南极洲干雪的深度,结果与仿真数据有很好的一致性,初步验证了GNSS-R 技术可以用来反演雪深的可行性,这为以后的干雪研究做了基础性工作。 后续工作将继续分析欧空局的南极洲干雪数据,并与其他方法反演雪深结果作比较。
GNSS-R 作为一个新兴的、高精度、全方位、实时遥感技术,已经显示出对研究地球表面参数具有的潜力;将来,随着国内外发射的卫星越来越多,卫星的反射信号资源也会越来越丰富,这会给科学研究提供可靠依据,因此,GNSS-R 技术有着大好前景。
[1] Prokop A. Assessing the applicability of terrestrial laser scanning forspatial snow depth measurements[J]. Cold Reg.Sci. Technol.,2008,45(3):155-163.
[2] Lutz E R,Geist T,Stötter J. Investigations of Airborne Laser Scanning Signal Intensity on glacial surfaces: utilizing comprehensive Laser Geometry Modeling and Surface Type Modeling;(a case study: Svartisheibreen, Norway)[M]. na,2003.
[3] Martin-Neira M. A passive reflectometry and interferometry system (PARIS): Application to ocean altimetry [J]. ESA journal,1993(17):331-355.
[4] Auber J C,Bibaut A,Rigal J M. Characterization of multipath on land and sea at GPS frequencies [C]//Proceedings of the 7th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1994). 1994:1155-1171.
[5] Martín-Neira M,Caparrini M,Font-Rossello J,et al. The PARIS concept: an experimental demonstration of sea surface altimetry using GPS reflected signals [J]. Geoscience and Remote Sensing, IEEE Transactions on,2001,39(1):142-150.
[6] Fabra F. GNSS-R as a source of opportunity for sea ice and dry snow remote sensing [D]. Ph. D. Dissertation,Polytechnical University of Catalonia (UPC), Barcelona,2013.
[7] Ulaby F T,Moore R K,Fung A K. Microwave Remote Sensing: Active and Passive [M]. Dedham, MA: Artech House,1986: 1797-1848.
[8] Nogués-Correig O,Galí E C,Campderrós J S,et al. A GPSreflections receiver that computes Doppler/delay maps in real time [J]. Geoscience and Remote Sensing, IEEE Transactions on,2007,45(1):156-174.